También podría gustarte
- Evaluaciones Demand-Driven Supply Chain (DDSC)Documento56 páginasEvaluaciones Demand-Driven Supply Chain (DDSC)sergio alberto monroy estupiñan100% (2)
- VM001-Cochinilla AlgodonosaDocumento19 páginasVM001-Cochinilla AlgodonosaanubisethAún no hay calificaciones
- 06 EvaluacionDocumento2 páginas06 Evaluacionrakelaf100% (1)
- Conceptos Manejo Del AulaDocumento11 páginasConceptos Manejo Del AulaPriscilla O. ÁlvarezAún no hay calificaciones
- La Teoría de La Impugnación y Recursos CivilesDocumento91 páginasLa Teoría de La Impugnación y Recursos CivilescondomiAún no hay calificaciones
- Universidad Complutense de Madrid: Síndrome de Munchausen Por Poderes: Un Tipo Sutil de Niños MaltratadosDocumento274 páginasUniversidad Complutense de Madrid: Síndrome de Munchausen Por Poderes: Un Tipo Sutil de Niños MaltratadosTesis ShaioAún no hay calificaciones
- Formato de Induccion y ReinduccionDocumento3 páginasFormato de Induccion y ReinduccionRomina AlvarezAún no hay calificaciones
- Planeación Historia 1Documento3 páginasPlaneación Historia 1Yamil Ali Pacheco RomeroAún no hay calificaciones
- Tarea 1Documento7 páginasTarea 1Fernanda VargasAún no hay calificaciones
- Taller NietzscheDocumento3 páginasTaller NietzscheFabiola Cardenas100% (3)
- Curso Estilismo Alimentos Food Styling OnlineDocumento10 páginasCurso Estilismo Alimentos Food Styling OnlineAlexander DomoulinAún no hay calificaciones
- Lenguaje AlgebraicoDocumento2 páginasLenguaje AlgebraicoEdgar LinaresAún no hay calificaciones
- CUESTIONARIODocumento4 páginasCUESTIONARIOTania Fretel CarhuasAún no hay calificaciones
- Apuntes de Radiologia 4 Ecografia y Tac AbdominalDocumento2 páginasApuntes de Radiologia 4 Ecografia y Tac AbdominalDennis UchihaAún no hay calificaciones
- Articulo LitispendenciaDocumento5 páginasArticulo LitispendenciaYuriko Grados ArceAún no hay calificaciones
- Fusarium Oxysporum F.sp. MelonisDocumento11 páginasFusarium Oxysporum F.sp. MelonisKarin Santana Gonzales100% (1)
- Aula FàcilDocumento83 páginasAula FàcilCatalina BallesterAún no hay calificaciones
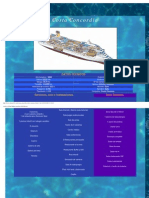
- Costa Concordia Datos TécnicosDocumento8 páginasCosta Concordia Datos TécnicosAlberto Sacido RomeroAún no hay calificaciones
- Proyecto de TesisDocumento204 páginasProyecto de TesishidrocarburosLGLP LIQUIDO GLPAún no hay calificaciones
- PIF CalidadEmbarcacionesDocumento104 páginasPIF CalidadEmbarcacionesLuis Leonardo Castro RodríguezAún no hay calificaciones
- Evaluacion 2 - Taller de Obra GruesaDocumento4 páginasEvaluacion 2 - Taller de Obra GruesaSilvana Lizama ContrerasAún no hay calificaciones
- Meningitis NeonatalDocumento5 páginasMeningitis NeonatalBrindis ErickAún no hay calificaciones
- 1904 AvenaPreCo THDocumento2 páginas1904 AvenaPreCo THSergio CruzAún no hay calificaciones
- Formato Protocolo de Investigación Leyva MartinezDocumento9 páginasFormato Protocolo de Investigación Leyva MartinezMartin Leyva MartínezAún no hay calificaciones
- El Descubrimiento de América y Conquista de GuatemalaDocumento8 páginasEl Descubrimiento de América y Conquista de GuatemalaEdin OsorioAún no hay calificaciones
- Informe de HotelDocumento78 páginasInforme de Hotelkerberus86Aún no hay calificaciones
- PUDU Animal en Peligro de Extincion DoDocumento5 páginasPUDU Animal en Peligro de Extincion DoCarlos De La Cruz TrujillanoAún no hay calificaciones
- Estudio de Caso - Proyecto de Grado - Jose Daniel Daniel QuevedoDocumento24 páginasEstudio de Caso - Proyecto de Grado - Jose Daniel Daniel QuevedoJosé Julio Vera MendozaAún no hay calificaciones
- Tema 3 - Geometría ElementalDocumento5 páginasTema 3 - Geometría ElementalblancaAún no hay calificaciones
- Dios-Creador y RedentorDocumento17 páginasDios-Creador y RedentorDaniel Muñoz HdezAún no hay calificaciones