También podría gustarte
- Tarea1 MauricioEsterling G114Documento10 páginasTarea1 MauricioEsterling G114AndresFelipeLeonAún no hay calificaciones
- Tarea 3 - Análisis en El Dominio Del Tiempo GRUPO 203042 - 11 G PDFDocumento49 páginasTarea 3 - Análisis en El Dominio Del Tiempo GRUPO 203042 - 11 G PDFCristianCamiloAún no hay calificaciones
- Trabajo Colaborativo Etapa 3 Grupo 34Documento32 páginasTrabajo Colaborativo Etapa 3 Grupo 34Andres Naranjo SarmientoAún no hay calificaciones
- Primera Práctica Electronica AnalogaDocumento4 páginasPrimera Práctica Electronica AnalogaDavid HernandezAún no hay calificaciones
- Tarea3 203042 80Documento25 páginasTarea3 203042 80jose paezAún no hay calificaciones
- Tarea 3 Señales Y Sistemas John Alexander ChicaizaDocumento7 páginasTarea 3 Señales Y Sistemas John Alexander ChicaizaJohn Alexander ChicaizaAún no hay calificaciones
- Fase 4 - Señales y Sistemas - Final - Alexis PedrozaDocumento24 páginasFase 4 - Señales y Sistemas - Final - Alexis Pedrozaalexis pedrozaAún no hay calificaciones
- Aporte 1 Sistemas DinamicosDocumento2 páginasAporte 1 Sistemas DinamicosLaura Gómez Cardona100% (1)
- Post Tarea Cesar GonzalezDocumento9 páginasPost Tarea Cesar GonzalezRamos JuanAún no hay calificaciones
- Fase 3 Modelado Matematico Del Sistema 243005 73Documento14 páginasFase 3 Modelado Matematico Del Sistema 243005 73FabianAún no hay calificaciones
- Ejercicio 3 CorrecionDocumento5 páginasEjercicio 3 Correcionjulián Andrés ToroAún no hay calificaciones
- Tarea 2 - Senales en FrecuenciaDocumento28 páginasTarea 2 - Senales en FrecuenciaDIEGO MONTOYA RINCONAún no hay calificaciones
- Ejercicio 3 Carlos SalamancaDocumento4 páginasEjercicio 3 Carlos SalamancaMarcelo Tanimuca100% (1)
- Tarea3 - Jaime - Bastidas Señales y Sitemas Unidad 3Documento12 páginasTarea3 - Jaime - Bastidas Señales y Sitemas Unidad 3Jorge Fabian Gualtero100% (1)
- Tarea - 2 - SEÑALES Y SISTEMASDocumento18 páginasTarea - 2 - SEÑALES Y SISTEMASEdwin LayaAún no hay calificaciones
- Unidad 2 Tarea 2 Senales y SistemasDocumento13 páginasUnidad 2 Tarea 2 Senales y SistemasJulian CelisAún no hay calificaciones
- Ejercicio 3 - Juan MaestreDocumento2 páginasEjercicio 3 - Juan MaestreRoberto Sierra0% (1)
- Tarea3 Grupo203042 40Documento36 páginasTarea3 Grupo203042 40angi baronAún no hay calificaciones
- Adrian Ariza Tarea3Documento10 páginasAdrian Ariza Tarea3Faiver LlanosAún no hay calificaciones
- Pre-Tarea Sistemas Dinámicos UNADDocumento13 páginasPre-Tarea Sistemas Dinámicos UNADfelipe sanchezAún no hay calificaciones
- Tarea2 Grupo (203042A 764)Documento34 páginasTarea2 Grupo (203042A 764)oswaldo perciaAún no hay calificaciones
- Segundo Aporte JohnPosso Grupo24Documento4 páginasSegundo Aporte JohnPosso Grupo24Omar Gomez VasquezAún no hay calificaciones
- Tarea 4 - 29.Documento15 páginasTarea 4 - 29.faber orlando50% (2)
- Plantilla Formato - IEEE TELEMATICA UNADDocumento4 páginasPlantilla Formato - IEEE TELEMATICA UNADDario AcostaAún no hay calificaciones
- Unidad1 Paso3 Jeinson Hernandez 203037-15Documento14 páginasUnidad1 Paso3 Jeinson Hernandez 203037-15Bayron Prada Guerrero100% (1)
- Fase1 - Grupo31 Electronica de Pontencia Envio 2 FaseDocumento5 páginasFase1 - Grupo31 Electronica de Pontencia Envio 2 Fasediegoraven777Aún no hay calificaciones
- Etapa 3 - Sistemas DinamicosDocumento9 páginasEtapa 3 - Sistemas Dinamicosmguadalupe2Aún no hay calificaciones
- Solucion 1Documento6 páginasSolucion 1Miguel andresAún no hay calificaciones
- Ejercicio1 Yeison ZamoraDocumento9 páginasEjercicio1 Yeison ZamoraanaAún no hay calificaciones
- Tarea 2Documento21 páginasTarea 2MAURICIO ROMEROAún no hay calificaciones
- Fase 2 - Andres Peña - 66Documento26 páginasFase 2 - Andres Peña - 66Elida Rosana Romero Peralta100% (2)
- Paso 3 - Harold DiazDocumento10 páginasPaso 3 - Harold DiazXergio LmusAún no hay calificaciones
- Milton Rojas 954 Tarea 3Documento6 páginasMilton Rojas 954 Tarea 3milton espinosaAún no hay calificaciones
- Aporte IndividualDocumento6 páginasAporte Individualcardona9512Aún no hay calificaciones
- Fase - 4 - FINAL SEÑALES y SISTEMAS COMPLETODocumento29 páginasFase - 4 - FINAL SEÑALES y SISTEMAS COMPLETODeimy TorresAún no hay calificaciones
- Fase 2 Introducción Al Modelado de Sistemas Dinámicos - Luis - LazaroDocumento8 páginasFase 2 Introducción Al Modelado de Sistemas Dinámicos - Luis - LazaroJuan Camilo Tejada OrjuelaAún no hay calificaciones
- Paso5 - Grupo - 208052 - 14Documento4 páginasPaso5 - Grupo - 208052 - 14jairoAún no hay calificaciones
- Unidad 2 Etapa 3 Sistemas Dinamicos Desarrollo Literal CDocumento6 páginasUnidad 2 Etapa 3 Sistemas Dinamicos Desarrollo Literal CLeafar ZerepAún no hay calificaciones
- Grupo 12 Fase 1 203039Documento26 páginasGrupo 12 Fase 1 203039MANUEL RINCON GONZALEZ100% (1)
- Paso 3 Software Avanzado PDFDocumento25 páginasPaso 3 Software Avanzado PDFLiliana IdroboAún no hay calificaciones
- 57 - Tarea - 4Documento40 páginas57 - Tarea - 4Erwin CardonaAún no hay calificaciones
- Tarea 4 - Software para IngenieriaDocumento17 páginasTarea 4 - Software para IngenieriaDiana GonzálezAún no hay calificaciones
- Señales y SistemasDocumento20 páginasSeñales y SistemasJairo Velasquez Bustos100% (1)
- Grupo94 Fase 1Documento17 páginasGrupo94 Fase 1Jhon EscorciaAún no hay calificaciones
- Tarea 3 - JavierMedinaDocumento15 páginasTarea 3 - JavierMedinaCoordinador ServiciosAún no hay calificaciones
- 1º Aporte Trabajo Colaborativo Unidad 3 - Tarea 3Documento21 páginas1º Aporte Trabajo Colaborativo Unidad 3 - Tarea 3Manquillo Solarte Edward100% (1)
- Stefany Albarracin - 299004 - 6-Tarea 2Documento5 páginasStefany Albarracin - 299004 - 6-Tarea 2Stefany albarracin bordaAún no hay calificaciones
- FASE 2 Leider TorresDocumento12 páginasFASE 2 Leider Torreserick DHoz100% (3)
- Ejercicio 1 - Cristian VillegasDocumento14 páginasEjercicio 1 - Cristian VillegasEder CogolloAún no hay calificaciones
- Conceptos Teóricos Eder CogolloDocumento3 páginasConceptos Teóricos Eder CogolloEder Cogollo100% (1)
- Conceptos Teóricos - Edwin OsorioDocumento3 páginasConceptos Teóricos - Edwin OsorioEder CogolloAún no hay calificaciones
- Ejercicio 1 - Ricardo - OviedoDocumento11 páginasEjercicio 1 - Ricardo - OviedoLaura Torres CastroAún no hay calificaciones
- Grupo 14 Tarea 3Documento14 páginasGrupo 14 Tarea 3Miguel Ahumada50% (2)
- Desarrollo Analisis de CircuitosDocumento31 páginasDesarrollo Analisis de Circuitosmiguelitux martinez50% (2)
- Tarea2 YesidVillateDocumento7 páginasTarea2 YesidVillatediego rubio100% (2)
- Tarea 2Documento12 páginasTarea 2Miguel Gomez100% (1)
- Tarea3 Grupo62Documento40 páginasTarea3 Grupo62Richard Mejia AcevedoAún no hay calificaciones
- Transporte de Lodos 2018Documento11 páginasTransporte de Lodos 2018Deybi Cruz FloresAún no hay calificaciones
- Practica 1 Balanza de Pesos MuertosDocumento4 páginasPractica 1 Balanza de Pesos MuertoslightninfireAún no hay calificaciones
- HT08 LimitesDocumento4 páginasHT08 LimitesJesús SJ Rivera CAún no hay calificaciones
- MSDS Thorcem PDFDocumento4 páginasMSDS Thorcem PDFAnonymous oKr1c2WAún no hay calificaciones
- Proyecto de Tesis (Extendida)Documento58 páginasProyecto de Tesis (Extendida)Anonymous 81dRSukyAún no hay calificaciones
- Fisica y Quimica Pre Universitario Tomo 2Documento35 páginasFisica y Quimica Pre Universitario Tomo 2Eder Mendoza Mendoza100% (1)
- Circuitos Eléctricos en D.C y Leyes de KirchhoffDocumento10 páginasCircuitos Eléctricos en D.C y Leyes de KirchhoffLUIS CARLOS ARISPE APAZAAún no hay calificaciones
- CURSO HIDRAULICA - Ejercicios Propuestos Del Todos Los Temas - 3Documento8 páginasCURSO HIDRAULICA - Ejercicios Propuestos Del Todos Los Temas - 3lincolAún no hay calificaciones
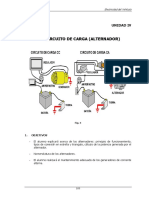
- Circuito de Carga (Alternador)Documento18 páginasCircuito de Carga (Alternador)HugoAún no hay calificaciones
- Formulacio Reacciones ResueltoDocumento6 páginasFormulacio Reacciones ResueltoDaniela Andrea Aros BarriosAún no hay calificaciones
- Solución Al Ejercicio Propuesto 1Documento6 páginasSolución Al Ejercicio Propuesto 1Sergio Leyva RodriguezAún no hay calificaciones
- Integrales Definidas e Indefinidas 3Documento22 páginasIntegrales Definidas e Indefinidas 3Rolando Javier Cárdenas EscamillaAún no hay calificaciones
- Taller de Señales en Osciloscopio TriangularesDocumento6 páginasTaller de Señales en Osciloscopio TriangularesJoHaN ESPOCITOAún no hay calificaciones
- Relaciones ProporcionalesDocumento7 páginasRelaciones ProporcionaleslabavillaAún no hay calificaciones
- Dosificacion de ConcretoDocumento10 páginasDosificacion de ConcretoKatherine Pisconte ChuctayaAún no hay calificaciones
- Teoria AritmeticaDocumento39 páginasTeoria AritmeticazhazzuAún no hay calificaciones
- FOLLETO MECANISMOS (Parte 2) PDFDocumento10 páginasFOLLETO MECANISMOS (Parte 2) PDFErik GuadarramaAún no hay calificaciones
- Análisis de Objetos-Durán Méndez Hanna ZeltzinDocumento19 páginasAnálisis de Objetos-Durán Méndez Hanna ZeltzinHanna MendezAún no hay calificaciones
- Ecuaciones Parametricas Curvas Planas LGDocumento19 páginasEcuaciones Parametricas Curvas Planas LGedisonAún no hay calificaciones
- NB 1069Documento18 páginasNB 1069NAO_1980% (2)
- PT VAI 038 MT ENEL Medida de Resistencia de Malla Puesta A Tierra en SSEE Rev 1 2 26Documento25 páginasPT VAI 038 MT ENEL Medida de Resistencia de Malla Puesta A Tierra en SSEE Rev 1 2 26Solange Carreno RojoAún no hay calificaciones
- Agrietamiento Por Contracción en Miembros de Concreto Completamente RestringidoDocumento4 páginasAgrietamiento Por Contracción en Miembros de Concreto Completamente RestringidoRodolfo Jimenez MelquiadesAún no hay calificaciones
- Las Aventuras de La SerpienteDocumento13 páginasLas Aventuras de La SerpienteAnonymous EAwHxwqAún no hay calificaciones
- Movimiento Lento de La CortezaDocumento8 páginasMovimiento Lento de La CortezaYarid Poma CastellanosAún no hay calificaciones
- Trabajo EscalonadoDocumento6 páginasTrabajo EscalonadoLeonardo Bazan VasquezAún no hay calificaciones
- Operar y Ganar en Bolsa Con La Teoría de Las Ondas de ElliottDocumento60 páginasOperar y Ganar en Bolsa Con La Teoría de Las Ondas de ElliottLML 89Aún no hay calificaciones
- Registro de Induccion 3dDocumento19 páginasRegistro de Induccion 3dFernadez Ramos CarolayAún no hay calificaciones
- Formato Matriz de Peligros ActualizadaDocumento715 páginasFormato Matriz de Peligros ActualizadaJorge Eduardo Valderrama GarciaAún no hay calificaciones
- Razonamiento Matematico Daul Andres Paiva YanayacoDocumento5 páginasRazonamiento Matematico Daul Andres Paiva YanayacoHenry Sosa Calle67% (3)
- Estática: Ejercicios de PrácticaDocumento3 páginasEstática: Ejercicios de PrácticaHair Samayoa BrionesAún no hay calificaciones