También podría gustarte
- Examen Curso SolidworksDocumento3 páginasExamen Curso SolidworksJonathan Fernandez Tapia100% (1)
- Reductores FalkDocumento8 páginasReductores FalkJuvenal Santibañez100% (2)
- Plan de Mantenimiento Preventivo PlantaDocumento19 páginasPlan de Mantenimiento Preventivo PlantaPedro Antonio Fernandez MoraAún no hay calificaciones
- Ejercicio RoscaDocumento4 páginasEjercicio RoscaJulieth CardenasAún no hay calificaciones
- Tem4 Uniones Roscadas y RemachadasDocumento20 páginasTem4 Uniones Roscadas y RemachadasKatrina GordonAún no hay calificaciones
- Ejemplo RodamientosDocumento8 páginasEjemplo RodamientosJavier VicenteAún no hay calificaciones
- Tallado de Engranajes Hipoidales - PPT ORIGINALDocumento38 páginasTallado de Engranajes Hipoidales - PPT ORIGINALWilber Marcelo Apaz Arancibia50% (2)
- El Plato DivisorDocumento30 páginasEl Plato DivisorPam Muñiz100% (1)
- Metrol Trigon Verif ConosDocumento9 páginasMetrol Trigon Verif ConositorderaAún no hay calificaciones
- Calculo Engranajes Dientes RectosDocumento22 páginasCalculo Engranajes Dientes Rectoscabezon3Aún no hay calificaciones
- 1 Ejercicio Engranajes CorregidosDocumento2 páginas1 Ejercicio Engranajes CorregidosBenjamin OsccoAún no hay calificaciones
- Dimensionamiento de Una MatrizDocumento33 páginasDimensionamiento de Una MatrizSebastiánSalas0% (2)
- Teoria TornillosDocumento18 páginasTeoria TornillosNicolas AstrobiAún no hay calificaciones
- Informe de Caja Reductora Casi TerminadoDocumento84 páginasInforme de Caja Reductora Casi TerminadoJhan karlo Arenas MendezAún no hay calificaciones
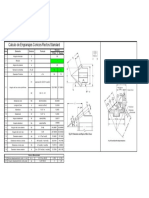
- Calculo - de - Engranajes - Conicos - Rectos - Standard 30-72 Dientes PDFDocumento1 páginaCalculo - de - Engranajes - Conicos - Rectos - Standard 30-72 Dientes PDFdeliaabreguAún no hay calificaciones
- Tabla de Engranajes Norma Agma 2016Documento19 páginasTabla de Engranajes Norma Agma 2016Luis Frank NB100% (1)
- Sin Fin y Corona Formulas Procedimientos y Ejemplos PDFDocumento7 páginasSin Fin y Corona Formulas Procedimientos y Ejemplos PDFDiego RiveraAún no hay calificaciones
- Geometria Basica Engranajes CilindricosDocumento42 páginasGeometria Basica Engranajes Cilindricoschicho640493% (14)
- Formulas Do Mecanizado Con FresadoraDocumento1 páginaFormulas Do Mecanizado Con Fresadoragalicia.manuel100% (5)
- Cálculo de Engranajes Cilíndricos Helicoidales Sistema MilimétricoDocumento11 páginasCálculo de Engranajes Cilíndricos Helicoidales Sistema MilimétricoAntonio Villa VillaAún no hay calificaciones
- Soldadura Por Arco Eléctrico22Documento41 páginasSoldadura Por Arco Eléctrico22Antonio Villa VillaAún no hay calificaciones
- Plaquitas Torno SANDVIK MTG-ADocumento152 páginasPlaquitas Torno SANDVIK MTG-Axprado0% (1)
- Clase 5 Engranajes CilindricosDocumento4 páginasClase 5 Engranajes CilindricosJohan SneiderAún no hay calificaciones
- Hoja de Prosesos para Un Engranaje Recto DiferencialDocumento5 páginasHoja de Prosesos para Un Engranaje Recto DiferencialMecanizado SenaAún no hay calificaciones
- (4 Cálculos de Fresadora)Documento6 páginas(4 Cálculos de Fresadora)Instructor Nelson DiazAún no hay calificaciones
- Aplicacion Del Metodo Paso A PasoDocumento5 páginasAplicacion Del Metodo Paso A PasoAntonio Villa VillaAún no hay calificaciones
- Cálculos de La Relación de Transmisión de Engranajes PlanetariosDocumento5 páginasCálculos de La Relación de Transmisión de Engranajes PlanetariosLuis ArmanAún no hay calificaciones
- Reporte de Engrane RectoDocumento12 páginasReporte de Engrane RectoHéctor CarrascoAún no hay calificaciones
- Tornillo Sin Fin Problema ResueltoDocumento6 páginasTornillo Sin Fin Problema Resueltoeeeepla0% (1)
- Tren de Potencia I-Ii - Manual Del Estudiante - Mayo2008Documento140 páginasTren de Potencia I-Ii - Manual Del Estudiante - Mayo2008Teofilo Paredes CosmeAún no hay calificaciones
- Análisis de AveríasDocumento29 páginasAnálisis de AveríasAntonio Villa VillaAún no hay calificaciones
- Calc y Selec de Bba Sello MecanicoDocumento9 páginasCalc y Selec de Bba Sello MecanicoHumberto Imata SumireAún no hay calificaciones
- Ejercicios de Engranajes Rectos y Helicoidales para El Maraquito de $1Documento6 páginasEjercicios de Engranajes Rectos y Helicoidales para El Maraquito de $1Christopher Mauricio Garay Monardes0% (1)
- Instalaciones ElectricasDocumento18 páginasInstalaciones ElectricasyuruwewAún no hay calificaciones
- Juan Leon Dinamica de Maquinas PDFDocumento385 páginasJuan Leon Dinamica de Maquinas PDFL'Angel Alvarez100% (2)
- Tablas Engranajes PDFDocumento1 páginaTablas Engranajes PDFMartin Alejandro DIAZAún no hay calificaciones
- S03.s1 - Transmisión de Potencia Por Engranajes - v2 - 2Documento31 páginasS03.s1 - Transmisión de Potencia Por Engranajes - v2 - 2JonathanCatariAún no hay calificaciones
- Ejemplo de Calculo de La Fuerza de TroqueladoDocumento2 páginasEjemplo de Calculo de La Fuerza de TroqueladokAún no hay calificaciones
- Práctica de Cálculos de Tren de EngranajesDocumento2 páginasPráctica de Cálculos de Tren de EngranajesAndrés Zùñiga Retana100% (1)
- cUESTIONARIO EJESDocumento4 páginascUESTIONARIO EJESCristian AlvaradoAún no hay calificaciones
- 3.-Union de Junta A Tope en VDocumento10 páginas3.-Union de Junta A Tope en Vwilmer_avalos307Aún no hay calificaciones
- 8 Hoja de Procesos TornilloDocumento5 páginas8 Hoja de Procesos Tornillonicolas cristianoAún no hay calificaciones
- Cabezal DivisorDocumento11 páginasCabezal DivisorDiego Iguasnia VilemaAún no hay calificaciones
- DIVISION DIFERENCIAL Mecanica 3 PDFDocumento22 páginasDIVISION DIFERENCIAL Mecanica 3 PDFDiego LunaAún no hay calificaciones
- Guia Practica de Cilindrado y Ref Rent AdoDocumento4 páginasGuia Practica de Cilindrado y Ref Rent AdoelrafasaAún no hay calificaciones
- Los Diales en Maquinas HerramientasDocumento6 páginasLos Diales en Maquinas HerramientasCarlos Alberto Gomez Perez0% (1)
- Evaluacion FresadoraDocumento4 páginasEvaluacion Fresadoraretro73Aún no hay calificaciones
- Rosca Cuadrada en Torno (Cálculos)Documento3 páginasRosca Cuadrada en Torno (Cálculos)ricardoAún no hay calificaciones
- Desbaste ConicoDocumento9 páginasDesbaste ConicoCarlos PilatasigAún no hay calificaciones
- Formulas ResortesDocumento4 páginasFormulas ResortesWiracochaPiura100% (1)
- FRESADODocumento6 páginasFRESADOJudith CervantesAún no hay calificaciones
- Velocidad de Corte y Avance - TaladradoDocumento12 páginasVelocidad de Corte y Avance - TaladradoJaime Moises Benavides Chi-ñasAún no hay calificaciones
- Fuerza y Potencia de CorteDocumento7 páginasFuerza y Potencia de CorteMaria JoseAún no hay calificaciones
- Laboratorio 3 Codigo G73 G72 Simulación 1 ROEL CHIPANADocumento20 páginasLaboratorio 3 Codigo G73 G72 Simulación 1 ROEL CHIPANAroelAún no hay calificaciones
- Perfilado CepilladoDocumento2 páginasPerfilado CepilladoCar Jav EspAún no hay calificaciones
- Cola de MilanoDocumento8 páginasCola de MilanoMarco DiazAún no hay calificaciones
- Cojinete de Deslizamiento PDFDocumento24 páginasCojinete de Deslizamiento PDFRaymond Garcia100% (1)
- Engranajes ConicosDocumento25 páginasEngranajes ConicosPaul García YepezAún no hay calificaciones
- Proceso de Rosca WhitworthDocumento3 páginasProceso de Rosca WhitworthMoises GuiaAún no hay calificaciones
- Calculo Del Numero de Diviciones MECANIZACIONDocumento8 páginasCalculo Del Numero de Diviciones MECANIZACIONChristian DverlyAún no hay calificaciones
- Cabezal Universal Divisor FresadoraDocumento6 páginasCabezal Universal Divisor FresadoralaymoncarlosAún no hay calificaciones
- Cadenas CinematicasDocumento8 páginasCadenas CinematicasdaniawordAún no hay calificaciones
- Mecanizado de ArbolesDocumento5 páginasMecanizado de ArbolesidexchimbiteAún no hay calificaciones
- Velocidad de CorteDocumento3 páginasVelocidad de CorteAnonymous DhCbvWxYrAún no hay calificaciones
- Actividades UD 7Documento8 páginasActividades UD 7joseAún no hay calificaciones
- Estrías o Cuñas Axiales-Longitud de Las EstríasDocumento2 páginasEstrías o Cuñas Axiales-Longitud de Las Estríasjefferson granda100% (1)
- Examen Final Lab CNCDocumento213 páginasExamen Final Lab CNCGarbel LemusAún no hay calificaciones
- Laboratorio. 4 Codigo G02 - G03 - Simulación - AsdDocumento20 páginasLaboratorio. 4 Codigo G02 - G03 - Simulación - AsdAngelAún no hay calificaciones
- Tema 111Documento34 páginasTema 111Antonio Villa VillaAún no hay calificaciones
- 5 1 Transmision de MovimientoDocumento43 páginas5 1 Transmision de Movimiento'Anniel FigueroaAún no hay calificaciones
- Trabajo EngranajesDocumento18 páginasTrabajo EngranajesDanilo AcostaAún no hay calificaciones
- Diseño de EngranajesDocumento7 páginasDiseño de EngranajesDiana RubioAún no hay calificaciones
- Engranajes Conceptos, Relación de Velocidad - 230302 - 140720Documento10 páginasEngranajes Conceptos, Relación de Velocidad - 230302 - 140720Marcelo UrunagaAún no hay calificaciones
- Medidas Oficiales y MatematicasDocumento81 páginasMedidas Oficiales y MatematicasAntonio Villa VillaAún no hay calificaciones
- Document Instalaciones Electricas y AutomatismosDocumento10 páginasDocument Instalaciones Electricas y AutomatismosAntonio Villa VillaAún no hay calificaciones
- Sistema de Medidas EuropeasDocumento5 páginasSistema de Medidas EuropeasAntonio Villa VillaAún no hay calificaciones
- Sistema Metrico DecimalDocumento5 páginasSistema Metrico DecimalAntonio Villa VillaAún no hay calificaciones
- Sistema de Medidas EuropeasDocumento5 páginasSistema de Medidas EuropeasAntonio Villa VillaAún no hay calificaciones
- Tema 111Documento34 páginasTema 111Antonio Villa VillaAún no hay calificaciones
- Clasificación Según La Forma Del Engranaje2Documento22 páginasClasificación Según La Forma Del Engranaje2Antonio Villa VillaAún no hay calificaciones
- Mecanismos Otros DosDocumento41 páginasMecanismos Otros DosAntonio Villa VillaAún no hay calificaciones
- Mecanismos Tres OtrosDocumento39 páginasMecanismos Tres OtrosAntonio Villa VillaAún no hay calificaciones
- Modulo3 UD1 DibujoTecnicoDocumento55 páginasModulo3 UD1 DibujoTecnicoAntonio Villa Villa100% (1)
- Otros Mecanismos UnoDocumento39 páginasOtros Mecanismos UnoAntonio Villa Villa0% (1)
- Calculoseleccion 2Documento167 páginasCalculoseleccion 2Diego SancAún no hay calificaciones
- PET220 - BOMBEO MECANICO vs4Documento107 páginasPET220 - BOMBEO MECANICO vs4Genedyen GarciaAún no hay calificaciones
- Equipos Y Servicios A BordoDocumento36 páginasEquipos Y Servicios A BordoYisnervys Rojas SeniorAún no hay calificaciones
- Taller Sinfin Cremallera 1Documento2 páginasTaller Sinfin Cremallera 1Hdo. Arnulfo Sierra MoralesAún no hay calificaciones
- Cálculo de La Velocidad en Mecanismos de Transmisión CicularDocumento9 páginasCálculo de La Velocidad en Mecanismos de Transmisión CicularcupmoskaAún no hay calificaciones
- MecanismoDocumento35 páginasMecanismoJosé Gregorio TimaureAún no hay calificaciones
- Acople Cadena CajaDocumento1 páginaAcople Cadena CajaJOHAN ARTURO GRIMALDOS PEREZAún no hay calificaciones
- TGM Weg Reductores Lnea Planetaria Sucroenergetica PDFDocumento3 páginasTGM Weg Reductores Lnea Planetaria Sucroenergetica PDFJuan Pablo Fernandez ZuñigaAún no hay calificaciones
- Ejemplo de Dibujo de TallerDocumento11 páginasEjemplo de Dibujo de TallerKelly ApolisanAún no hay calificaciones
- Clase 7Documento34 páginasClase 7anette valdez reyesAún no hay calificaciones
- Motorreductor de Dos EtapasDocumento6 páginasMotorreductor de Dos EtapasJUAN PABLO ARENAS GAVIRIAAún no hay calificaciones
- XXX X01/X01Documento13 páginasXXX X01/X01electrico_concepcionAún no hay calificaciones
- Anual SM Semana 31 - RMDocumento14 páginasAnual SM Semana 31 - RMkevin brayam marcelo rupayAún no hay calificaciones
- Diseño Cinemático de Un Tren de EngranajesDocumento3 páginasDiseño Cinemático de Un Tren de EngranajesCarlos M.Aún no hay calificaciones
- Octavo Tecno Guia 4 Periodo 3Documento7 páginasOctavo Tecno Guia 4 Periodo 3orlandini2000Aún no hay calificaciones
- Cuaderno Ejercicios MecanismosDocumento8 páginasCuaderno Ejercicios Mecanismosfagonzalez195850% (2)
- Trenes de EngranajesDocumento13 páginasTrenes de EngranajesFaby SaucedoAún no hay calificaciones
- Ley Fundamental Del EngranajeDocumento4 páginasLey Fundamental Del EngranajeMartin Gil CastilloAún no hay calificaciones
- Relacion de TransmisionDocumento6 páginasRelacion de TransmisionAlexander Florez AroneAún no hay calificaciones
- Pasos para Calcular La Relación de Transmisión de EngranajesDocumento5 páginasPasos para Calcular La Relación de Transmisión de EngranajesDani ZapicoAún no hay calificaciones