Documentos de Académico
Documentos de Profesional
Documentos de Cultura
08 Diseño Plástico Basado en Desempeño PDF
Cargado por
Jorge Gelvez MunevarTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
08 Diseño Plástico Basado en Desempeño PDF
Cargado por
Jorge Gelvez MunevarCopyright:
Formatos disponibles
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
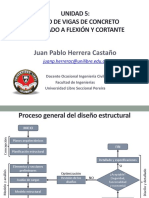
1. Introducción
El diseño basado en el desempeño, DBD, más que el
Diseño plástico
planteamiento de unas provisiones, es una actitud
sísmico de diferente hacia el diseño sísmico
edificios de
acero, basado Lo que pretende el DBD es:
en desempeño, Lograr niveles de desempeño específicos dentro de niveles
DPBD, de confiabilidad definidos
Gabriel Valencia Clement
Diseño plástico por desempeño 2 Gabriel Valencia Clement
1. Introducción 1. Introducción
Útil para el diseño
El diseño sísmico por desempeño establece cuál puede ser
el comportamiento, considerando • sísmico de nuevos edificios o
• las incertidumbres inherentes en la cuantificación de la • la actualización sísmica de edificios existentes
amenaza potencial, y
• las incertidumbres en la evaluación de la respuesta real Con una comprensión realista de
del edificio. • el riesgo de víctimas,
• la interrupción de ocupación y
• las pérdidas económicas que pueden ocurrir.
Diseño plástico por desempeño 3 Gabriel Valencia Clement Diseño plástico por desempeño 4 Gabriel Valencia Clement
. Gabriel Valencia Clement 1
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
1. Introducción 1. Introducción
Con buen grado de aproximación, permite determinar Mediante DBD, es posible aproximarse al cumplimiento de
• Qué nivel de seguridad y objetivos de desempeño tales como:
• Qué nivel de protección de la propiedad, - Mantener operación total con un evento de 72 años
son aceptables para los propietarios de los edificios y a (50% de excedencia en 50 años)
qué costo - Seguridad de vidas en evento de 475 año (10% en 50
años)
En contraste con los enfoques de diseño usuales, el DBD
- Prevención de colapso en evento de 2500 años ( 2% en
proporciona una metodología sistemática para evaluar la
50 años)
capacidad de desempeño de un edificio, sistema o
componente.
Diseño plástico por desempeño 5 Gabriel Valencia Clement Diseño plástico por desempeño 6 Gabriel Valencia Clement
En forma
Seleccionar objetivos
esquemática:
de desempeño
Realizar diseño
preliminar
Evaluar la capacidad
de desempeño 2. Introducción al
análisis plástico
Revise el NO Cumple SI
diseño o los los objetivos el
objetivos desempeño
Diseño plástico por desempeño 8 Gabriel Valencia Clement
: Hamburger, 2003
. Gabriel Valencia Clement 2
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
Región plástica Endurecimiento por deformación
2. Introducción al análisis plástico 2.3 Propiedades del Acero
Ante carga creciente, la Sec. transversal de un miembro
puede alcanzar esfuerzos de fluencia, si no se presentan
estados límite de servicio o de resistencia, tales como:
• deformación excesiva,
• inestabilidad lateral,
• inestabilidad local, Tres zonas
• fatiga, Z. elástica
• fractura frágil,
• falla por pandeo por cortante, entre otros
Diseño plástico por desempeño 9 Gabriel Valencia Clement Estructuras Metálicas II – Introducción 10 Gabriel Valencia Clement
2. Introducción al análisis plástico 2.1. Estructuras con barras en tensión.
Sea:
Parte inicial idealizada:
De donde: T1 = T2.
Sean Fy = 250 Mpa, A = 100 mm²
TMáx = Fy ·A = 25 kN
Con esta P estado límite.
Diseño plástico por desempeño 11 Gabriel Valencia Clement Diseño plástico por desempeño 12 Gabriel Valencia Clement
. Gabriel Valencia Clement 3
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
2.1. Estructuras con barras en tensión. 2.1. Estructuras con barras en tensión.
Sea: Por la geometría de la estructura:
Se concluye:
¿En qué barras se presentará fluencia primero?
¿Qué esfuerzos habrá en las otras?
Con Tmax = 25 kN P = 42.7 kN
¿Es un estado límite?
Diseño plástico por desempeño 13 Gabriel Valencia Clement Diseño plástico por desempeño 14 Gabriel Valencia Clement
2.1. Estructuras con barras en tensión. 2.1. Estructuras con barras en tensión.
s/análisis elástico, sí es un estado límite. Luego:
Pero en realidad la situación es:
El procedimiento seguido análisis elasto-plástico
Por otra parte:
Análisis Plástico: partiendo del mecanismo las 3 barras
en fluencia
¿Cuánto vale DT1?
Diseño plástico por desempeño 15 Gabriel Valencia Clement Diseño plástico por desempeño 16 Gabriel Valencia Clement
. Gabriel Valencia Clement 4
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
2.2. Flexión 2.2. Flexión
El proceso de plastificación: Al incrementar las cargas:
Diseño plástico por desempeño 17 Gabriel Valencia Clement Articulación Plástica
2.2. Flexión 2.2. Flexión
Articulación elástica y Articulación plástica: Factor de forma:
Diseño plástico por desempeño 19 Gabriel Valencia Clement Diseño plástico por desempeño 20 Gabriel Valencia Clement
. Gabriel Valencia Clement 5
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
2.2. Flexión 2.2. Flexión
Redistribución de Momentos: Si Dw La viga se comporta como simplemente apoyada:
Además del incremento de resistencia My Mp
La redistribución de momentos contribuye a la reserva de
resistencia de una estructura hiperestática cargada por
encima del límite elástico.
Sea:
Aquí no hay
mecanismo
Diseño plástico por desempeño 21 Gabriel Valencia Clement Diseño plástico por desempeño 22 Gabriel Valencia Clement
2.2. Flexión. Análisis plástico de la viga
Diag M para mecanismo: En lugar de análisis elasto-plástico, partir directamente del
mecanismo:
Mecanismo → 3 articulaciones plásticas. Se requieren 3 Art Pl
Por tanto el Diag M se conoce
Diseño plástico por desempeño 24 Gabriel Valencia Clement
. Gabriel Valencia Clement 6
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
2. Introducción al análisis plástico Hipótesis
wp se puede hallar por superposición: 1. El acero es dúctil. Puede deformarse plásticamente sin
fractura. No se consideran,
• El endurecimiento por deformación
• La historia de las deformaciones.
2. En una sección plastificada se supone que todas las
fibras están solicitadas por Fy.
En un apoyo: 0 + (-Mp) = - Mp
3. No se considera el efecto de la cortante.
En el centro: wpl²/8 - Mp = Mp 4. El sistema de cargas que actúa sobre la estructura
crece proporcionalmente.
Diseño plástico por desempeño 25 Gabriel Valencia Clement Diseño plástico por desempeño 26 Gabriel Valencia Clement
Hipótesis 2. Introducción al análisis plástico
5. Las deformaciones son pequeñas. Para formular las Método Cinemático: se basa en el principio de los trabajos
Ecs de equilibrio se usa la geometría inicial. virtuales:
Si un cuerpo está en equilibrio con un sistema de
6. Se supone que no se presentarán fenómenos de
fuerzas actuando sobre el, y sufre un desplazamiento
inestabilidad antes de llegar al mecanismo.
por la acción de un agente externo, el trabajo virtual que
realizan las fuerzas externas es igual al desarrollado por
las tensiones internas del elemento.
Diseño plástico por desempeño 27 Gabriel Valencia Clement Diseño plástico por desempeño 28 Gabriel Valencia Clement
. Gabriel Valencia Clement 7
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
2. Introducción al análisis plástico 2. Introducción al análisis plástico
Ejemplo 1: hallar Pp para viga empotrada con dos P:
En 1 en 2 en 3
Solución:
Se aplica U que produce un D:
Luego:
y,
De donde: Fin del ejemplo 1.
Diseño plástico por desempeño 29 Gabriel Valencia Clement Diseño plástico por desempeño 30 Gabriel Valencia Clement
2. Introducción al análisis plástico 2. Introducción al análisis plástico
Se pueden resolver pórticos: Solución:
Ejemplo 2: hallar P para el mecanismo. Suponer que todos Hay dos mecanismos independientes:
los elementos tienen la misma resistencia a la flexión, Mp. 1) Mecanismo de viga:
Luego:
Diseño plástico por desempeño 31 Gabriel Valencia Clement Diseño plástico por desempeño 32 Gabriel Valencia Clement
. Gabriel Valencia Clement 8
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
2. Introducción al análisis plástico 2. Introducción al análisis plástico
2) Mecanismo de pórtico: 2) Mecanismo combinado:
Luego:
Este valor es menor que los anteriores, parece ser el
Luego: mecanismo. Se comprueba trazando el diagrama de
momentos.
Diseño plástico por desempeño 33 Gabriel Valencia Clement Diseño plástico por desempeño 34 Gabriel Valencia Clement
2. Introducción al análisis plástico
Diagrama de momentos: Bibliografía
recomendada
Fin del ejemplo 2.
Diseño plástico por desempeño 35 Gabriel Valencia Clement Diseño plástico por desempeño 36 Gabriel Valencia Clement
. Gabriel Valencia Clement 9
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
2. Introducción al análisis plástico
Otro método de análisis: plastificación progresiva:
Cortante basal, (N 6x10
6.0
)
5.0
4.0
Comportamiento elástico 3. Diseño sísmico
3.0
2.0
plástico por
Comportamiento inelástico
1.0 desempeño.
0.0
0 20 40 60 80 100 120 140 160
Desplazamiento a nivel cubierta (mm)
Acciones Sísmicas en Estructuras de Acero 37 Gabriel Valencia Clement Diseño plástico por desempeño 38 Gabriel Valencia Clement
3. Diseño plástico por desempeño. Diseño plástico por desempeño.
La propuesta de Goel, Chao y otros. Desde el comienzo deben determinarse:
Es esencial conocer el comportamiento último de la - Las fuerzas laterales apropiadas para el diseño.
estructura: - La jerarquía de resistencia de los miembros
- Relaciones no-lineales fuerza-deformación. - El mecanismo que es deseable
- Mecanismo de plastificación - La deriva para los diferentes niveles de amenaza.
La metodología propuesta por Goel et all, prácticamente
elimina la necesidad de iteraciones posteriores al diseño
preliminar
Diseño plástico por desempeño 39 Gabriel Valencia Clement Diseño plástico por desempeño 40 Gabriel Valencia Clement
. Gabriel Valencia Clement 10
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
3.1. El método PBPD 3.1. El método PBPD
Se preseleccionan como estados límite de desempeño:
- La deriva objetivo.
- El mecanismo plástico
Estos estados límite están relacionados con el grado y
distribución del daño, respectivamente.
Para hallar el corte basal para una amenaza específica se
igualan
• El trabajo requerido para desplazar la estructura
monotónicamente hasta la deriva objetivo y
• La energía requerida por un SDOF equivalente Diseño plástico por desempeño 42 Gabriel Valencia Clement
3.1. El método PBPD 3.1. El método DPBD
También se emplea una nueva distribución de fuerzas Las investigaciones de Goel, Chao y otros, permiten
laterales basada en una distribución relativa de las establecer que el DPBD es del todo válido para:
máximas cortantes de piso, consistente con resultados de - Pórticos resistentes a momento, PRM.
análisis dinámicos. - Pórticos con diagonales restringidas a pandeo, PDRD.
A continuación, se hace un análisis plástico, para detallar - Pórticos con diagonales excéntricas, PAE.
los miembros y las conexiones, para alcanzar el mecanismo - Pórticos con cercha dúctil, PCD.
esperado.
Para pórticos con diagonales concéntricas, hay limitaciones
debido al comportamiento histerético de las diagonales.
Diseño plástico por desempeño 43 Gabriel Valencia Clement Diseño plástico por desempeño 44 Gabriel Valencia Clement
. Gabriel Valencia Clement 11
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
3.1. El método PBPD 3.1. El método PBPD
En este método, el diseñador selecciona: Incluso el factor I, que incrementa las fuerzas sísmicas en
- las derivas objetivo (correspondiente a una ductilidad y un intento por disminuir la deriva y la ductilidad, es evidente
daño aceptables, que deja muchas dudas respecto a su eficacia.
- El mecanismo (para una respuesta aceptable), y para La disminución de daño, se puede garantizar en mejor
una fácil inspección y reparación post-sismo. medida controlando la deriva
Hecho lo anterior, se determinan las fuerzas en los En edificios complejos, con irregularidades importantes,
miembros y se hace el dimensionamiento para una para completar el proceso de diseño, puede resultar útil
determinada amenaza (según el espectro) refinar el diseño DPBD con algún procedimiento no-lineal o
No se requieren factores como R, W0, o Cd (en USA). dinámico.
Sobre los cuales hay muchas dudas, y se eligen a criterio.
Diseño plástico por desempeño 45 Gabriel Valencia Clement Diseño plástico por desempeño 46 Gabriel Valencia Clement
3.2. Diseño Plástico versus Diseño Elástico 3.2. Diseño Plástico versus Diseño Elástico
Cuando se diseña elásticamente, la estructura tiene una En el diseño plástico:
reserva de resistencia considerable, pero que mediante Mediante el equilibrio
análisis elásticos no se puede cuantificar. Determinado el estático.
Con un fuerte sismo, pueden plastificarse miembros que es mecanismo, hallar ó
inconveniente o hasta riesgoso que lo hagan las solicitaciones
Mediante proceso
plastif. progresiva
El diseño plástico se basa en la resistencia última y en el En cualquier caso, es necesario contemplar los
mecanismo. efectos de 2°Or.
Los miembros que permanecerán elásticos, deben
diseñarse con lo que liberan los plastificados.
Diseño plástico por desempeño 47 Gabriel Valencia Clement Diseño plástico por desempeño 48 Gabriel Valencia Clement
. Gabriel Valencia Clement 12
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
El DPBD permite
3.2. Diseño Plástico versus Diseño Elástico controlar la distribución
de las Artr plásticas en
Es más correcto hablar de mecanismo de plastificación que forma más uniforme
mecanismo de falla, pues al alcanzar el mecanismo,
normalmente la estructura no colapsa. Se trata de un
estado límite de deformaciones
Esquema Goel, 2009
Diseño plástico por desempeño 49 Gabriel Valencia Clement
3.2. Ventajas del DPBD: 3.2. Ventajas del DPBD :
- Método muy directo (prácticamente sin iteraciones). Análisis del comportamiento con diferentes derivas objetivo
(Goel, 2016):
- Comportamiento conocido y mejorado
- Permite analizar muchas alternativas de forma ágil y
sencilla.
- Permite distribuir de modo más uniforme las Art
plásticas, que los análisis elásticos, y aún inelásticos.
- Esa uniformidad implica disipación en un número mayor
de sitios menores deformaciones localizadas en
pocos puntos.
Diseño plástico por desempeño 51 Gabriel Valencia Clement
. Gabriel Valencia Clement 13
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
Hay muchas alternativas para diseñar una estructura:
3.3. Procedimiento del método DPBD
1. Seleccionar el Mecanismo Objetivo.
Por ejemplo
PRM PAE
3.3. Procedimiento del método DPBD 3.3. Procedimiento del método DPBD
2. Determinar las fuerzas laterales. Para alcanzar el principal objetico del DPBD, esto es, una
Usualmente en códigos las cargas estáticas equivalentes respuesta predecible y deseable de la estructura, es
se obtienen a partir de modelos simplificados. Hipótesis: necesario considerar el comportamiento inelástico en el
- Las estructuras trabajan en rango elástico proceso de diseño.
- Para el primer modo de vibración. Para el DPBD, Chao et al. presentan una propuesta basada
en las máximas cortantes de piso que se observan en
Pero a su vez, los códigos suponen que se presentarán análisis no-lineales dinámicos cronológicos.
grandes deformaciones en rango inelástico cuando se
presente el sismo de diseño.
Las Fs laterales serán bien diferentes de las previstas
Diseño plástico por desempeño 55 Gabriel Valencia Clement Diseño plástico por desempeño 56 Gabriel Valencia Clement
. Gabriel Valencia Clement 14
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
3.3. Procedimiento del método PBPD 3.3. Procedimiento del método PBPD
La propuesta para la distribución de las Fs Lat, es: Donde:
(3-1) = factor de distribución de la cortante al nivel i,
(3-2) Vi y Vn = Fuerzas laterales en los niveles i y n (cubierta)
Con:
wj y wn = masas en el nivel j y en cubierta,
• i = n n+1 = 0
hj y hn = niveles del piso j, y de la cubierta (desde el terreno)
• j = [1 a n]
T = período fundamental,
(3-3) Fi = fuerza lateral al nivel i,
• n = 1 V = la cortante basal.
• j = [i a n]
Diseño plástico por desempeño 57 Gabriel Valencia Clement Diseño plástico por desempeño 58 Gabriel Valencia Clement
3.3. Procedimiento del método PBPD 3.3. Procedimiento del método PBPD
Distribución de las Fs Lat, IBC = NSR-10 (Ec A.4.3-3), vs Chao determinó que con esta propuesta:
propuesta Goel-Chao, 2007:
1. Los pórticos presentan una distribución más uniforme
de derivas de piso.
2. Se obtienen muy buenas estimaciones de demandas a
NSR-10 flexión en las columnas, cuando estas sufren grandes
deformaciones inelásticas.
3. Los efectos de los modos superiores quedan bien
Chao et all
representados.
Diseño plástico por desempeño 59 Gabriel Valencia Clement Diseño plástico por desempeño 60 Gabriel Valencia Clement
. Gabriel Valencia Clement 15
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
3.3. Procedimiento del método PBPD 3.3. Procedimiento del método PBPD
Cortante basal de diseño. La energía elástica inducida, Ee , para un SDOF, es
Se calcula para un estado (3-4)
No hay que hacer una
inelástico, tomando como revisión de
Sv = pseudo velocidad espectral, m = la masa total.
base la deriva objetivo. cumplimiento de deriva.
En un sistema SDOF que oscila, la relación
En el Mec seleccionado, se va incrementando en forma entre la frecuencia angular y el período, es:
monotónica hasta alcanzar la deriva objetivo Por su parte, la aceleración espectral es igual a la
No se requiere un proceso de plastif progresiva. velocidad espectral multiplicada por la frecuencia angular:
(3-5)
Diseño plástico por desempeño 61 Gabriel Valencia Clement Diseño plástico por desempeño 62 Gabriel Valencia Clement
3.3. Procedimiento del método PBPD 3.3. Procedimiento del método PBPD
De las Ecs 3-4 y 3-5: Recordemos que la cortante basal, V, es:
(3-6) (3-8)
Con W = peso del edificio.
Pero la cantidad de energía disipada tiene una componente
plástica, Ep, De las Ecs 3-7 y 3-8, y con arreglos algebraicos:
Considerando que la energía total disipada es igual a g
veces la elástica: (3-9)
(3-7)
Diseño plástico por desempeño 63 Gabriel Valencia Clement Diseño plástico por desempeño 64 Gabriel Valencia Clement
. Gabriel Valencia Clement 16
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
3.3. Procedimiento del método PBPD 3.3. Procedimiento del método PBPD
Para el mecanismo elegido, e igualando WE = WI, A partir de las Ecs. 3-1, 3-9 y 3-10:
Considerando que la energía
(3-11)
plástica es igual al trabajo
externo, Ep = WE : a es un parámetro adimensional que depende de:
(3-10) - La rigidez de la estructura,
- Las propiedades modales (i → Ec 3-3)
Con qp el ángulo de deriva inel.,
- Nivel de deriva plástica de diseño, qp.
igual a qu – qe , con qu el
ángulo correspondiente a la
deriva objetivo (3-12)
Diseño plástico por desempeño 65 Gabriel Valencia Clement
• j = [1 a n]
3.3. Procedimiento del método PBPD 3.3. Procedimiento del método PBPD
La Ec 3-12 se dedujo suponiendo un comportamiento El factor g depende de la ductilidad, m, y de el coeficiente
histerético elasto-plástico de los sistemas estructurales. de disipación de energía, R.
Válido para PRM y para PAE, pero no para PAC, en los que La relación
el pandeo de las diagonales no tiene ese comportamiento. entre cortante
basal y la
deriva es
Diseño plástico por desempeño 67 Gabriel Valencia Clement Igualando áreas: (3-13)
. Gabriel Valencia Clement 17
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
3.3. Procedimiento del método PBPD 3.3. Procedimiento del método PBPD
De la Ec 3-6 Por el contrario para Relación V-D
T ≥ 0.6 s, los des- para igual desplazamiento:
(3-14)
plazamientos
Con De = R Dy elásticos de la
Dmax = ms Dy
(3-15) estructura son
similares a los una
Obsérvese que ms es la relación entre la deriva objetivo, DMax estructura de igual
y la deriva Dy. rigidez inicial que se
Cuando T → 0, la estructura es muy rígida, la deform comporte elásti-
inelástica es muy reducida R → 1. camente.
Diseño plástico por desempeño 69 Gabriel Valencia Clement Diseño plástico por desempeño 70 Gabriel Valencia Clement
3.3. Procedimiento del método PBPD 3.3. Procedimiento del método PBPD
Newmark & Hall: En la Ec 3-12 aparece el ángulo de deriva plástico, por tanto,
el control de deriva se considera desde el inicio del diseño.
T ≤ 0.1 s R=1 Teniendo en cuenta los valores de R hallados para varios
0.1 s < T < 0.6 s (3-16) pórticos (Valencia y Valencia, 2008), puede establecerse
T ≥ 0.6 s R=m que para una deriva de 1% (NSR-10), el ángulo de deriva
para la fluencia, qy, es del orden de:
Tabla 3.1
Ángulo deriva, qy
Tipo de pórtico
s/Goel et al s/Valencia
PRM 1.0% = 0.01 0.90% = 0.0090
PAE 0.5% = 0.005 0.40% = 0.0040
Diseño plástico por desempeño 71 Gabriel Valencia Clement
PAC 0.3% = 0.003 0.30% = 0.0030
. Gabriel Valencia Clement 18
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
3.3. Procedimiento del método PBPD 3.3. Procedimiento del método PBPD
La resistencia requerida en cada piso puede determinarse
El análisis plástico permite alcanzar el mecanismo deseado: igualando trabajos virtuales, WE = Wi.
- PRM → Art Pl en extremos de las vigas
(3-17)
- PAE → Plastificación del vínculo
- PCD → plastificación del segmento especial No se incluyen cargas gravitacionales, pues por antisimetría
- PAC → mecanismo de diagonales de la deformada, se anulan sus WE
Es deseable tener la distribución de la resistencia de la
estructura a lo largo de la altura siguiendo la distribución de
las cortantes de piso → distribución de cortante i, (Ec 3-3)
calibrada mediante análisis cronológicos no-lineales.
Diseño plástico por desempeño 73 Gabriel Valencia Clement Diseño plástico por desempeño 69 Gabriel Valencia Clement
3.3. Procedimiento del método PBPD 3.3. Procedimiento del método PBPD
Rn es Mp en PRM, Pj en un PRM,
Vp en PAE,
Axial en PAC, etc
Q es la deformación de miembros
gp
plastificados por flexión, cortante o axial. q
En PRM, por ejemplo, sería q, si la Art.
se formara en la cara de la columna,
pero con L’ = dist entre Art. Pl.
Q = g = (L/L’ ) qp. (3-18)
(3-19)
Diseño plástico por desempeño 70 Gabriel Valencia Clement Diseño plástico por desempeño 76 Gabriel Valencia Clement
. Gabriel Valencia Clement 19
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
3.3. Resumen del procedimiento del DPBD 3.3. Procedimiento del método PBPD
1. Seleccionar un mecanismo y una deriva objetivo, 4. Modificar V si el comportamiento fuerza-desplazamiento
consistente con los objetivos de diseño. Suponer una de la estructura es diferente del EP supuesto.
relación fuerza - desplazamiento de tipo elasto-plástico,
(EP) calcular la rotación por deriva para fluencia, qy. 5. Dimensionar los miembros que con el análisis plástico
2. Estimar el período natural, T, de la estructura, y evaluar se espera que disiparán inelásticamente la energía del
una distribución de las cargas laterales. sismo. Debe mantenerse la distribución vertical de
3. Con la aceleración Sa del espectro, calcular la cortante resistencia lateral cercana a la distribución inicial de la
basal, V, igualando el trabajo requerido para desplazar cortante.
monotónicamente la estructura hasta la deriva objetivo Los miembros que deben permanecer elásticos se
(no se requiere Plastif. progresiva), con la energía diseñarán con lo que liberan los que plastifican, más
requerida para desplazar un SDOF equivalente. sobreresistencia por endurecimiento, más efectos P-D.
Diseño plástico por desempeño 77 Gabriel Valencia Clement Diseño plástico por desempeño 78 Gabriel Valencia Clement
3.4. Pórticos Resistentes a Momento, PRM Descripción del proyecto
Ejemplo 1. PRM. El edificio de 7 pisos que se estudió Cap. 5 Cargas:
Uso: aulas y oficinas. Características: - Placas: 2.2 x 0.095 2.09 kN/m² (espesor promedio de
- Ubicación: Cajicá, Cundinamarca. la losa es 9.5 cm)
- Número de pisos: 7. - Peso propio 0.75 kN/m² (supuesto 65 k/m² +
- Dimensiones: 53.2 x 38.8 m. lámina colaborante)
- Módulos de 7.60x7.60 m. - CM en cubierta 1.00 kN/m² (impermeabilización,
- Altura pisos 3.50 m ejes, excepto el primer piso 5.80 m. ductos, CR, equipos)
- Losas de 60 mm de espesor sobre lámina colaborante - CM en pisos 1.90 kN/m² (cielorraso liviano +
de 3 pg, para espesor total de 135 mm. acabados, particiones)
Diseño plástico por desempeño 79 Gabriel Valencia Clement
- .
Diseño de edificios de varios pisos 80 Gabriel Valencia Clement
. Gabriel Valencia Clement 20
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
Descripción del proyecto
- Cerramientos 1.00 kN/m² (m² de cerramiento)
- CV en aulas y Ofic. 2.00 kN/m²
- CV en corredores 3.00 kN/m²
- CV en cubierta 2.00 kN/m²
- Sismo: de acuerdo con NSR-10
- Viento: de acuerdo con NSR-10.
- Material: A570 Gr50.
Diseño de edificios de varios pisos 81 Gabriel Valencia Clement
Alzado SRCL
. Gabriel Valencia Clement 21
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
3.4. Pórticos Resistentes a Momento, PRM 3.4. Pórticos Resistentes a Momento, PRM
Recordemos las cargas evaluadas en Cap. 5 para el pórtico Masas:
sísmico (ejes 1 y 6):
Carga muerta en vigas de un pórtico de borde, en piso tipo:
CM = 19.86 kN/m
Carga muerta en vigas de un pórtico de borde, en cubierta:
CM = 12.67 kN/m
Carga viva en vigas de un pórtico de borde, en un piso tipo:
CV = 8.20 kN/m
Carga viva en vigas de un pórtico de borde, en cubierta:
CV = 8.20 kN/m Diseño plástico por desempeño 83 Gabriel Valencia Clement
3.4. Pórticos Resistentes a Momento, PRM 3.4. Pórticos Resistentes a Momento, PRM
Acciones sísmicas Cortante sísmico:
Parámetros sísmicos: Período (NSR-10 Ec A.4.2-3)
Para Cajicá, en zona de amenaza sísmica intermedia: T = 0.072 x 26.80 0.8 = 0.99 s
Aa = 0.15, Av = 0.20
Del espectro: Sa = 0.61
Para suelo tipo D:
Deriva objetivo, se analizan 2 casos:
Fa = 1.50 Fv = 2.00
1) Para sismo 10% - 50años → NSR-10 1.5%
Coeficiente de importancia I = 1.25 (Grupo de uso III) (Véase discusión Diap 90).
Peso total del edificio (del Ej Cap. 5) = 71,988 kN. 1) Prev. colapso, sismo 2% - 50 (2475 años) 2.2%
Diseño plástico por desempeño 87 Gabriel Valencia Clement Diseño plástico por desempeño 88 Gabriel Valencia Clement
. Gabriel Valencia Clement 22
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
Mecanismo objetivo: 3.4. Pórticos Resistentes a Momento, PRM
La deriva objetivo del 1.5% se adopta a partir del límite
NSR-10, 1.43%
• El valor 1.43% es el límite NSR-10, véase Cap. 5.
• La objetivo corresponde al pórtico deformado en
rango plástico, no a un análisis elástico con carga
sin dividir por R, que es la de NSR-10.
Comentario: debe comprobarse que las derivas no
sobrepasan el límite NSR-10 (con análisis elástico sin R),
para lo cual puede modificarse la deriva objetivo hasta
cumplir este requisito (adelante se comprobará).
Diseño plástico por desempeño 83 Gabriel Valencia Clement
3.4. Pórticos Resistentes a Momento, PRM 3.4. Pórticos Resistentes a Momento, PRM
Tabla 3.2a - Factores de distribución de la cortante sísmica: Con la teoría expuesta atrás, se halla V, considerando que:
- qy = ángulo de deriva de fluencia → Tabla 3.1 = 0.4%
- m = ductilidad = Dmax/Dy.
- R = factor de reducción de ductilidad → Ec 3-16
- g = factor de reducción de ductilidad → Ec 3-15
- V = cortante sísmica → Ec 3-11:
, con a → Ec 3-12
Diseño plástico por desempeño 91 Gabriel Valencia Clement Diseño plástico por desempeño 92 Gabriel Valencia Clement
. Gabriel Valencia Clement 23
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
3.4. Pórticos Resistentes a Momento, PRM
La distribución de la cortante en los pisos se evalúa con la
ayuda de los coeficientes i:
1) Con Ec 3-2,
para i = n (cubierta) C′vn = 0.286
2) Para los demás pisos, se puede aplicar la Ec. 3-2, o lo
que es lo mismo:
(1) Para
los dos PRM de 5 vanos, en c/pórtico será la mitad
→ Gobierna el caso 10% - 50 años, V = 18,118 kN Diseño plástico por desempeño 94 Gabriel Valencia Clement
Para el equilibrio de trabajos virtuales, no se debe tomar
3.4. Pórticos Resistentes a Momento, PRM una sola luz:
Por tanto, la distribución de la cortante para c/u de los dos Aquí hay 14Mpb por
PRM (ejes 1 y 6), con V = 18,1182 = 9,059 kN, será 2Mpc,
→ 7Mpb por 1 Mpc
Tabla 3.2b:
Mientras en el pórtico
completo:
70 Mpb por 6 Mpc
→ 11.7Mpb por 1 Mpc
O en todo caso, si se usa una luz hacer la corrección
Diseño plástico por desempeño 95 Gabriel Valencia Clement Diseño plástico por desempeño 96 Gabriel Valencia Clement
. Gabriel Valencia Clement 24
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
Trabajos virtuales:
3.4. Pórticos Resistentes a Momento, PRM
Ángulo gpi (en este caso igual para
todos los pisos y todas las luces):
Es función de L’. En este Ej. se conoce gp
L′ = 5.66 m (Cap. 5), L = 7.20 m, luego: q
L′
= 1.27q
L
Podría ser algo diferente dado que las vigas tienen perfiles
distintos a los usados en el Cap. 5
Con WI = WE En un caso general hay que suponer L′, y después
comprobarlo y si fuera del caso recalcular.
Diseño plástico por desempeño 97 Gabriel Valencia Clement Diseño plástico por desempeño 98 Gabriel Valencia Clement
Para conocer la resistencia requerida en c/nivel, iMpb, se Evaluación de Mpc:
parte de: El mecanismo del primer piso:
O bien:
Se despeja Mpb: Con WI = WE , y recordando que g p = 1.27q p
(1.27x10Mpb+ 2Mpc,E + 4Mpc,I)qp = V D = V q p h
Se multiplican los dos términos por i:
V en c/PRM sísmico = 9,059 kN
Mpb = 2,500 kN (Aprox, mediante tanteos)
(3-20)
Sea Mpc, E = 0.6 Mpc,I Mpc, E = 2,399, Mpc,I = 3,998 kN-m
Diseño plástico por desempeño 99 Gabriel Valencia Clement Diseño plástico por desempeño 99 Gabriel Valencia Clement
. Gabriel Valencia Clement 25
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
Y además, no con este mecanismo:
3.4. Pórticos Resistentes a Momento, PRM
Para hallar Mpc, Goel propone trabajar con el Sig mecanismo:
Sino con este
El autor no comparte la propuesta, pues las Cols interiores
tienen resistencias diferentes a las externas, pero no
necesariamente del doble. Además es Mec de psio!! ¿Por qué?
Se debe trabajar con el pórtico completo
¿Y por qué no se consideran las columnas del piso 2, o al
menos hasta L/2 (punto de inflexión)?
Diseño plástico por desempeño 101 Gabriel Valencia Clement
3.4. Pórticos Resistentes a Momento, PRM 3.4. Pórticos Resistentes a Momento, PRM
Para el diseño de las columnas, se deben incrementar los Por tanto, en la base 37,950 q
momentos con 1.1Ry , luego:
Conocidos todos los términos de la Ec 3-20 (se transcribe),
Columna exterior Mpc, E = 2,399 x 1.1 x 1.1 = 2,903 kN-m
Columna interior Mpc, I = 3,998 x 1.1 x 1.1 = 4,838 kN-m
Considerando que habrá carga axial, se eligen perfiles con se calculan las resistencias requeridas de todas las vigas,
una resistencia del orden de 1.5 M: iMpb, recuérdese Mpb = resistencia requerida de viga de
- Columna exterior: W30x211, Mp = 4,355 kN-m cubierta.
- Columna interior: W33x318, Mp = 7,310 kN-m Mu = la resistencia requerida considerando que hay Sec
Diseño plástico por desempeño 100 Gabriel Valencia Clement reducida, Mu = iMpb /0.8 (con ZRBS /Zx = 0.8 → Cap. 5)
. Gabriel Valencia Clement 26
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
3.4. Pórticos Resistentes a Momento, PRM 3.4. Pórticos Resistentes a Momento, PRM
(1) (2)
Tabla 3.2c. Las Tablas 3.2a, 3.2b y 3.2c se trabajan como una sola tabla:
En este ejemplo se dividieron para dar claridad a su desarrollo.
(1) = Ec 3-20 (2) por RBS, Mu = iMpb 0.8
Diseño plástico por desempeño 105 Gabriel Valencia Clement Diseño plástico por desempeño 106 Gabriel Valencia Clement
3.4. Pórticos Resistentes a Momento, PRM 3.4. Pórticos Resistentes a Momento, PRM
Factores de distribución En cuanto se sistematiza, resulta muy fácil estudiar
alternativas.
Goel vs NSR-10
Por ejemplo, en el Cap. 5 se determinó mediante un
análisis dinámico, que T = 1.25 s.
Con este T, se puede estudiar el DPBD qué resultados
daría.
Hay que considerar que para T mayor Sa es menor:
T = 1.25 s Sa = 0.50
Diseño plástico por desempeño 107 Gabriel Valencia Clement Diseño plástico por desempeño 108 Gabriel Valencia Clement
. Gabriel Valencia Clement 27
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
3.4. Pórticos Resistentes a Momento, PRM 3.4. Pórticos Resistentes a Momento, PRM
Resultados: Para T = 0.99 s.
Se observa que la fuerza
cortante es 4% menor que
la hallada para T = 0.99 s.
Diseño plástico por desempeño 109 Gabriel Valencia Clement Diseño plástico por desempeño 110 Gabriel Valencia Clement
3.4. Pórticos Resistentes a Momento, PRM 3.4. Pórticos Resistentes a Momento, PRM
Diseño de las vigas (Para T = 0.99 s): La resistencia en el RBS se determina con ZRBS.
El momento esperado en el RBS, es:
(3-21)
La fuerza cortante en el RBS
(3-22a)
(3-22b)
La fuerza sísmica supuesta de Der a Izq:
Diseño plástico por desempeño 111 Gabriel Valencia Clement Diseño plástico por desempeño 112 Gabriel Valencia Clement
. Gabriel Valencia Clement 28
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
Acciones liberadas en RBS por tramo central de las vigas 3.4. Pórticos Resistentes a Momento, PRM
Del Cap. 5 (Diap 132), Sh = 455 mm, L′ = 5.66 m. Columnas:
En Cubierta wL’/2 = 23.4x5.66/2 = 66.22 kN Con el diseño adoptado para las
En Piso tipo wL’/2 = 32.0x5.66/2 = 90.56 kN vigas, se determina el valor de las
fuerzas horizontales que producen
el mecanismo.
FL = cortante sísmica en la Col.
Se trabaja un árbol de acciones
sobre la columna exterior, y otro
para la interior:
Sh + dc/2 = 770 mm
111
Columna Exterior
3.4. Pórticos Resistentes a Momento, PRM
Para el equilibrio:
Se supuso W30 x 211 en piso 1 Mpc =4,355 kN-m
Con Ec 3-23, FL = 1,038 kN
Despejando para FL, cortante sísmica total
(3-23)
Con
Diseño plástico por desempeño 116 Gabriel Valencia Clement
. Gabriel Valencia Clement 29
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
3.4. Pórticos Resistentes a Momento, PRM Las acciones en la columna exterior serán:
V en F horiz (kN)
Para considerar las imperfecciones de construcción, y para Nivel Axial (1) MpR
RBS Sismo Ficticia
análisis de estabilidad, se usará el MAD. kN kN kN kN kN-m
Cub 18 467 296 0.97 -1,134
7 25 491 229 1.03 -1,134
Las cargas ficticias se hallan con la Ec F.2.3.2.1 de NSR-10: 6 25 730 171 1.51 -1,811
5 25 730 130 1.51 -1,811
Ni = 0.002Yi
4 25 841 98 1.73 -2,124
3 25 841 69 1.73 -2,124
Con Yi = la carga vertical aplicada en el nivel i. 2 25 986 44 2.02 -2,535
166 5,087 1,038 10.51
(1) El axial corresponde a w
(1.2D+L) en Sh+dc/2
(w en L’ ya quedó en VRBS)
Diseño plástico por desempeño 117 Gabriel Valencia Clement Diseño plástico por desempeño 114 Gabriel Valencia Clement
Solicitaciones en la columna exterior. 3.4. Pórticos Resistentes a Momento, PRM
Con las acciones de Diap anterior: Diseño:
Diag. M
8
Kc con la Ec F.2.8.1-1a de NSR-10 = +
9
Diseño plástico por desempeño 119 Gabriel Valencia Clement Diseño plástico por desempeño 120 Gabriel Valencia Clement
. Gabriel Valencia Clement 30
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
Columna Interior:
3.4. Pórticos Resistentes a Momento, PRM Para el equilibrio:
Revisión relaciones ancho/espesor
M’pc puede ser diferente de Mpc (el
de la Col exterior)
VR1 # VR2 por gravitacionales (Ec 3-22)
Despejando para FL:
(3-24)
Diseño plástico por desempeño 121 Gabriel Valencia Clement
3.4. Pórticos Resistentes a Momento, PRM Acciones en la columna interna:
Se supuso Col piso 1 → W33x318, Mpc = 7,310 kN-m F horiz (kN) V en RBS (kN) MpR
Nivel Axial
(kN) Sismo Ficticia Izq Der (kN-m)
Con Ec 3-24, FL = 1,916 kN
Cub 36 547 0.34 334 467 -1,134
7 49 423 0.46 310 491 -1,134
6 49 315 0.46 549 730 -1,811
5 49 241 0.46 549 730 -1,811
4 49 181 0.46 660 841 -2,124
3 49 127 0.46 660 841 -2,124
2 49 82 0.46 805 986 -2,535
332 1,916 3.10 3,868 5,087
(1) El axial corresponde a w(1.2D+L) en Sh+dc/2
(w en L’ ya quedó en VRBS)
Diseño plástico por desempeño 123 Gabriel Valencia Clement Diseño plástico por desempeño 124 Gabriel Valencia Clement
. Gabriel Valencia Clement 31
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
3.4. Pórticos Resistentes a Momento, PRM 3.4. Pórticos Resistentes a Momento, PRM
Solicitaciones en la columna interior. Diseño columna interior:
Con las acciones de Diap anterior: Diag M
Diseño plástico por desempeño 125 Gabriel Valencia Clement Diseño plástico por desempeño 126 Gabriel Valencia Clement
3.4. Pórticos Resistentes a Momento, PRM 3.4. Pórticos Resistentes a Momento, PRM
Revisión relaciones ancho/espesor Comentario: se deja al lector la revisión de:
• Combinaciones de carga diferentes a 1.2D+L+E
• Redundancia
• Jerarquía de conexiones:
• Diseño de RBS como en Cap. 5
• Placas base: como en Cap. 5
• Otras revisiones, véase Cap. 5
Diseño plástico por desempeño 127 Gabriel Valencia Clement Diseño plástico por desempeño 128 Gabriel Valencia Clement
. Gabriel Valencia Clement 32
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
3.4. Pórticos Resistentes a Momento, PRM 3.4. Pórticos Resistentes a Momento, PRM
Comprobación de derivas de acuerdo con NSR-10. Conclusiones:
Se hace con la cortante determinada en el Cap 5 – PRM, La fuerza cortante sísmica que se estimó al iniciar el
a saber, Fs = 17,602 kN y mediante análisis dinámico: análisis era 9,059 kN, no obstante la requerida para el
Deriva Limite mecanismo, considerando las cortantes en las Cols:
Piso
(mm) (mm) Se consideró la - En Col externas (Diap. 114) ………... 1,035 kN
Cub 27.9 50.1 pérdida de rigidez - En Col Internas (Diap. 123) ………… 1,916 kN
7 40.7 50.1 por la sección
6 45.9 50.1 La suma de 2 Col Ex + 4 Col Int = 9,739 kN
5 48.4 50.1
reducida de las
vigas. ¿Por qué este valor no es igual al que se aplicó al iniciar
4 50.4 50.1
el proceso?
3 50.6 50.1
2 65.6 82.9
Diseño plástico por desempeño 129 Gabriel Valencia Clement Diseño plástico por desempeño 130 Gabriel Valencia Clement
3.4. Pórticos Resistentes a Momento, PRM 3.4. Pórticos Resistentes a Momento, PRM
Comparación de Plastificación hallada mediante un análisis inelástico con
curva esfuerzo-deformación bilneal:
deformaciones:
Altura (m)
DPBD.
Cap. 5.
Obsérvese la distribución
más uniforme de
desplazamientos Desplazamiento (mm)
Diseño plástico por desempeño 131 Gabriel Valencia Clement Diseño plástico por desempeño 132 Gabriel Valencia Clement
. Gabriel Valencia Clement 33
. Edificios con Estrutura de Acero Diseño Plástico Basado en Desempeño .
3.4. Pórticos Resistentes a Momento, PRM
Obsérvese que hay una plastificación generalizada en
todos los pisos, y que las deformaciones laterales son
más constantes que las determinadas con el método
elástico usual menores concentraciones.
¡Gracias por su atención!
* * *
Peso del pórtico DPBD …………… 109.1 t.
Peso del pórtico del Cap. 5 ………. 117.0 t
Fin del ejemplo 1.
Diseño plástico por desempeño 133 Gabriel Valencia Clement El Diseño Estructural como Arte 134 Gabriel Valencia Clement
. Gabriel Valencia Clement 34
También podría gustarte
- Actividad III - Fundamentando Teóricamente Mi Investigación-1Documento11 páginasActividad III - Fundamentando Teóricamente Mi Investigación-1Sandra Sierra33% (3)
- Ensayo Dia de MuertosDocumento5 páginasEnsayo Dia de MuertosAngel Sanchez Velazquez0% (2)
- Mampostería República DominicanaDocumento8 páginasMampostería República DominicanaAlexander Núñez MoralesAún no hay calificaciones
- Diseño Sísmico Basado en DesempeñoDocumento98 páginasDiseño Sísmico Basado en DesempeñoJhonnyTiradoChumaceroAún no hay calificaciones
- Evidencia 1 - Mundo ContemporaneoDocumento6 páginasEvidencia 1 - Mundo ContemporaneoIsrael RodríguezAún no hay calificaciones
- DOTTIDocumento11 páginasDOTTIMaría Laura PennellaAún no hay calificaciones
- Final Vulnerabilidad Diseo DesempeoDocumento13 páginasFinal Vulnerabilidad Diseo DesempeoChristian Fabian FríasAún no hay calificaciones
- Evaluación de La Vulnerabilidad SísmicaDocumento13 páginasEvaluación de La Vulnerabilidad SísmicaJhonatan MinchánAún no hay calificaciones
- Diseño Sismico Basado en Desempeño-CONICDocumento2 páginasDiseño Sismico Basado en Desempeño-CONICLuis E. Escarrachi100% (1)
- Metodologia de La Investigacion CientificaDocumento3 páginasMetodologia de La Investigacion CientificaRonald Paul Ninasivincha MonroyAún no hay calificaciones
- DariDocumento12 páginasDariAndrys VelasquezAún no hay calificaciones
- Diseno Basado en ControlDocumento33 páginasDiseno Basado en ControldiegoAún no hay calificaciones
- Análisis Probabilístico de La Seguridad Estructural - Clase 0 - Introducción CortaDocumento32 páginasAnálisis Probabilístico de La Seguridad Estructural - Clase 0 - Introducción Cortarenelopezl1313Aún no hay calificaciones
- Matriz de ConsistenciaDocumento6 páginasMatriz de ConsistenciaWilber Paucar PaniuraAún no hay calificaciones
- 3 Metodos de DisenoDocumento34 páginas3 Metodos de DisenoangelicalbotacioaAún no hay calificaciones
- Proyecto FinalDocumento12 páginasProyecto FinalSantiago Ospina porrasAún no hay calificaciones
- Análisis No LinealDocumento24 páginasAnálisis No LinealJHONJAIRO28Aún no hay calificaciones
- Concreto Armado I - Sesión 1 - USMPDocumento23 páginasConcreto Armado I - Sesión 1 - USMPKewin DelgadoAún no hay calificaciones
- Rehabilitacion Oficinas Rene Lagos PDFDocumento47 páginasRehabilitacion Oficinas Rene Lagos PDFDacheli ChengAún no hay calificaciones
- Diseño Por Desempeño Sísmico-Parte 1 PDFDocumento75 páginasDiseño Por Desempeño Sísmico-Parte 1 PDFerasmo capobiancoAún no hay calificaciones
- Evaluacion Integral Estructural TINGLADOS Sucre BoliviaDocumento39 páginasEvaluacion Integral Estructural TINGLADOS Sucre BoliviaAntho100% (3)
- Javalamo, 9Documento11 páginasJavalamo, 9Walter AlvaradoAún no hay calificaciones
- Operacionalizacion de Variables.Documento4 páginasOperacionalizacion de Variables.Deivi Vàsquez PAún no hay calificaciones
- Métodos de Diseño. 2021Documento29 páginasMétodos de Diseño. 2021Lucy De Perozo CarrizalesAún no hay calificaciones
- ICE2413-Cap 1Documento3 páginasICE2413-Cap 1hangarrodAún no hay calificaciones
- Diseño de Concreto Armado en EdificacionesDocumento6 páginasDiseño de Concreto Armado en EdificacionesOficina Tecnica en Arquitectura e IngenieríaAún no hay calificaciones
- Confiabilidad Estructural en EdificacionesDocumento3 páginasConfiabilidad Estructural en EdificacionesBryan Lions Meza TorresAún no hay calificaciones
- Structural ConcreteDocumento14 páginasStructural ConcreteJorgeAún no hay calificaciones
- Concreto Armado I: Alumna: Thalía Del Cármen Acero Condori 4-2-2020Documento2 páginasConcreto Armado I: Alumna: Thalía Del Cármen Acero Condori 4-2-2020orecaAún no hay calificaciones
- Criterio Columna Fuerte-Viga DebilDocumento6 páginasCriterio Columna Fuerte-Viga DebilJulio Cesar CurveloAún no hay calificaciones
- Metodos de DisenoDocumento33 páginasMetodos de DisenoCristian RocaAún no hay calificaciones
- Módulo de Concreto Armado IDocumento115 páginasMódulo de Concreto Armado IPepe VD100% (1)
- Tecnicas Reforzamiento Estructuras Construidas Concreto Deficiencias EstructuralesDocumento31 páginasTecnicas Reforzamiento Estructuras Construidas Concreto Deficiencias EstructuralesAndres LopezAún no hay calificaciones
- Tecnicas Reforzamiento Estructuras Construidas Concreto Deficiencias EstructuralesDocumento31 páginasTecnicas Reforzamiento Estructuras Construidas Concreto Deficiencias EstructuralesYonathan Yesghar Pacheco CervantesAún no hay calificaciones
- Seccion Final de VerdaDocumento32 páginasSeccion Final de VerdaCarlos O.grajalesAún no hay calificaciones
- J. A. Semana 1Documento26 páginasJ. A. Semana 1Juvenal Aquino CondezoAún no hay calificaciones
- 1.6 Repaso Diseño de Vigas A Flexión y CortanteDocumento11 páginas1.6 Repaso Diseño de Vigas A Flexión y CortanteAndres Florez BonillaAún no hay calificaciones
- 2021-I (IC901) Concreto Armado (Aula Virtual)Documento10 páginas2021-I (IC901) Concreto Armado (Aula Virtual)Roel Yaguno VelilleAún no hay calificaciones
- Formulario 3Documento3 páginasFormulario 3Alex StevensAún no hay calificaciones
- Constructividad y ConstructabilidadDocumento3 páginasConstructividad y ConstructabilidadEduardo Ruiz RuizAún no hay calificaciones
- EstructurasDocumento13 páginasEstructurasDIEGO CALDERÓNAún no hay calificaciones
- GrupoDocumento11 páginasGrupododeskadeAún no hay calificaciones
- Modulo Ii - Suelo de Fundación y SubrasanteDocumento34 páginasModulo Ii - Suelo de Fundación y SubrasanteCelina AlejandroAún no hay calificaciones
- Clase 02 - 31 05 2021Documento18 páginasClase 02 - 31 05 2021Javier RuizAún no hay calificaciones
- T01 Conceptos Grls Diseño ConstDocumento8 páginasT01 Conceptos Grls Diseño Constgabriel rodriguezAún no hay calificaciones
- Cumplimiento CTE Escuela InfantilDocumento54 páginasCumplimiento CTE Escuela InfantilricantplagarAún no hay calificaciones
- Técnicas de Reforzamiento de Estructuras Construidas de Concreto Que Presentan Deficiencias EstructuralesDocumento31 páginasTécnicas de Reforzamiento de Estructuras Construidas de Concreto Que Presentan Deficiencias EstructuralesMagaly MejiaAún no hay calificaciones
- Diseño de Estructuras de HormigonDocumento5 páginasDiseño de Estructuras de HormigonAndres David Ospina ArenasAún no hay calificaciones
- Performance-Based Design of Steel Towers Subject To Wind Action - En.esDocumento9 páginasPerformance-Based Design of Steel Towers Subject To Wind Action - En.esYerik LaloAún no hay calificaciones
- 21 Resistencia Característica Del ConcretoDocumento6 páginas21 Resistencia Característica Del ConcretoPabloAún no hay calificaciones
- Proceso de Diseño Estructural de Edificaciones en Concreto ArmadoDocumento53 páginasProceso de Diseño Estructural de Edificaciones en Concreto ArmadoAntony Beltran EchegarayAún no hay calificaciones
- 01 Concreto Armado - Caracteristicas de Los MaterialesDocumento68 páginas01 Concreto Armado - Caracteristicas de Los MaterialesMARCIAL ALMIRON PANTIAún no hay calificaciones
- Triptico Adoquines Sep 2023Documento2 páginasTriptico Adoquines Sep 2023maxpareja993Aún no hay calificaciones
- MEMORIACTErev 00Documento14 páginasMEMORIACTErev 00ManuelAún no hay calificaciones
- Universidad José Carlos MariáteguiDocumento13 páginasUniversidad José Carlos MariáteguiAlexa EspejoAún no hay calificaciones
- Panel GBS 2018Documento22 páginasPanel GBS 2018jose zenosAún no hay calificaciones
- Dialnet-Estructuras1ApuntesDeClase P1Documento50 páginasDialnet-Estructuras1ApuntesDeClase P1LITZY RIVERAAún no hay calificaciones
- Articulo Al 100%Documento8 páginasArticulo Al 100%Onán Palanta MuñizAún no hay calificaciones
- 3 Metodos de DisenoDocumento33 páginas3 Metodos de DisenoDavid Rozo GAún no hay calificaciones
- Pi NiñoDocumento16 páginasPi NiñoCarlos NBAún no hay calificaciones
- J.A. Semana 1Documento26 páginasJ.A. Semana 1Juvenal Aquino CondezoAún no hay calificaciones
- 2.0 MDC - Piscina Pony Parque PDFDocumento57 páginas2.0 MDC - Piscina Pony Parque PDFIvan D. Usta De La PeñaAún no hay calificaciones
- Peritaje - Sara y GilbertoDocumento26 páginasPeritaje - Sara y GilbertoIvan D. Usta De La PeñaAún no hay calificaciones
- Trabajo 60% Nave IndustrialDocumento2 páginasTrabajo 60% Nave IndustrialIvan D. Usta De La PeñaAún no hay calificaciones
- Pushover Concreto Armado SAP2000 %28diplomado CSi%29Documento37 páginasPushover Concreto Armado SAP2000 %28diplomado CSi%29KOKOTSSO80% (5)
- Los 30 Derechos Fundamentales de La Declaración Universal de Los Derechos HumanosDocumento5 páginasLos 30 Derechos Fundamentales de La Declaración Universal de Los Derechos HumanosJhohanhitha FhernhandhezAún no hay calificaciones
- Investigación DocumentalDocumento19 páginasInvestigación Documentalserggiuly VillarroelAún no hay calificaciones
- La Evaluación de La Docencia Desde La Perspectiva Del Propio Docente 34003606Documento10 páginasLa Evaluación de La Docencia Desde La Perspectiva Del Propio Docente 34003606Gladys González Salazar100% (1)
- NinoDocumento4 páginasNinoTamara CherokiAún no hay calificaciones
- Guia g3Documento5 páginasGuia g3magarita melo0% (2)
- Pa To GenesisDocumento12 páginasPa To GenesisPasitos De Colores GuarderíaAún no hay calificaciones
- Test Desarrollo de La Inteligencia 15Documento15 páginasTest Desarrollo de La Inteligencia 15Soledad PintoAún no hay calificaciones
- Evaluacion de 360 GradosDocumento20 páginasEvaluacion de 360 Gradosabner lopez0% (1)
- Trabajo de Tics Peligro de ExtincionDocumento40 páginasTrabajo de Tics Peligro de ExtincionRoberto TreviñoAún no hay calificaciones
- Ficha de Matemática Vi Ciclo 1ero. A-DDocumento3 páginasFicha de Matemática Vi Ciclo 1ero. A-DAlex León LópezAún no hay calificaciones
- Revista Ciencias Politicas PDFDocumento73 páginasRevista Ciencias Politicas PDFWilliam SantamariaAún no hay calificaciones
- Evaluación de Lenguaje Genero Narrativo 4°a 2021Documento4 páginasEvaluación de Lenguaje Genero Narrativo 4°a 2021Lilella Bedoya100% (1)
- Final de Etica Profesional PDFDocumento6 páginasFinal de Etica Profesional PDFAndrea PalaciossAún no hay calificaciones
- Tercera Entrega Semana 7 SimulaciónDocumento7 páginasTercera Entrega Semana 7 SimulaciónDiana PachonAún no hay calificaciones
- TlatelolcoDocumento2 páginasTlatelolcollAún no hay calificaciones
- La Idea Del Comunismo Alain BadiouDocumento8 páginasLa Idea Del Comunismo Alain BadiouCristian Mauricio Londoño AristizábalAún no hay calificaciones
- Aspectos Culturales Del Estado Delta AmacuroDocumento5 páginasAspectos Culturales Del Estado Delta AmacuroCORTUDELTA100% (1)
- Pae de ApendicitisDocumento48 páginasPae de ApendicitisPrincess Abigail71% (24)
- 04diseno de Un Data MartDocumento45 páginas04diseno de Un Data MartRafael AroAún no hay calificaciones
- Sesiones DERECHO ETICADocumento55 páginasSesiones DERECHO ETICAJulia Torre De La, CalvoAún no hay calificaciones
- Diseño No Experimental y EncuestaDocumento24 páginasDiseño No Experimental y EncuestaLaura Mojica0% (1)
- Independencia VenezuelaDocumento6 páginasIndependencia VenezuelaCecilio Silva Lobaton50% (2)
- Propiedades de Los Fluidos y Lodos de PerforaciónDocumento14 páginasPropiedades de Los Fluidos y Lodos de PerforaciónTiffany Johnson100% (1)
- Los Gitanos de Espana - Doc - 0Documento5 páginasLos Gitanos de Espana - Doc - 0Louise BigotAún no hay calificaciones
- Mi ProyectoDocumento4 páginasMi ProyectoJulio César Quispe PurihuamanAún no hay calificaciones
- Ibarretxe Basque Onomatopoeia 09Documento89 páginasIbarretxe Basque Onomatopoeia 09Nesa ThemanAún no hay calificaciones