También podría gustarte
- Reporte Control RemotoDocumento22 páginasReporte Control Remotojimy_bravoAún no hay calificaciones
- DetectorDocumento3 páginasDetectorAntony VilcayauriAún no hay calificaciones
- Laboratorio I-Control DigitalDocumento7 páginasLaboratorio I-Control DigitalFernandoAún no hay calificaciones
- Presentación Curso C PIC12F683Documento52 páginasPresentación Curso C PIC12F683erickAún no hay calificaciones
- Laboratorio 9 Modulo ADC y PWM Con El PIC 16F877ADocumento9 páginasLaboratorio 9 Modulo ADC y PWM Con El PIC 16F877AacajahuaringaAún no hay calificaciones
- P11 ElectronicaDocumento11 páginasP11 ElectronicaVeronicaAún no hay calificaciones
- Práctica4 E1 M9Documento16 páginasPráctica4 E1 M9Isaac Alejandro PinedaAún no hay calificaciones
- ArduinoplatformiovscodeDocumento28 páginasArduinoplatformiovscodeLucas FiordelisiAún no hay calificaciones
- Programar C MplabDocumento15 páginasProgramar C MplabArturo HernandesAún no hay calificaciones
- 1.puertos de Entrada-SalidaDocumento43 páginas1.puertos de Entrada-SalidaJesus Maria LizarzabalAún no hay calificaciones
- Cómo Medir Distancias Con El Sensor Ultrasónico PINGDocumento10 páginasCómo Medir Distancias Con El Sensor Ultrasónico PINGRoberto Castro LópezAún no hay calificaciones
- PRACTICA 01 PIC Automatizacion I-CamargoDocumento17 páginasPRACTICA 01 PIC Automatizacion I-CamargoNatan Gabriel Traspalacios VilladaAún no hay calificaciones
- Informe LCDDocumento6 páginasInforme LCDdenniseduAún no hay calificaciones
- CCS Compiler Project Pic WizardDocumento31 páginasCCS Compiler Project Pic WizardELPICHUEAún no hay calificaciones
- Lab 6 Puertos de Entrada y SalidaDocumento6 páginasLab 6 Puertos de Entrada y SalidaCarlos OrtegaAún no hay calificaciones
- Marco Teorico 1Documento13 páginasMarco Teorico 1André Cristhian Canales Canales MezaAún no hay calificaciones
- Placa Entrenadora Con PIC ProyectoDocumento7 páginasPlaca Entrenadora Con PIC ProyectoBryan PupialesAún no hay calificaciones
- Instituto Tecnologico de Apizaco.: Puertos de Pic18f4550Documento8 páginasInstituto Tecnologico de Apizaco.: Puertos de Pic18f4550MarianoAún no hay calificaciones
- Para Que Nuestro Pic Funcione FísicamenteDocumento7 páginasPara Que Nuestro Pic Funcione FísicamenteAna Suggey100% (1)
- Arduino Timer TutorialDocumento10 páginasArduino Timer TutorialPierDonneeAún no hay calificaciones
- Comunicación Serial 16F877ADocumento17 páginasComunicación Serial 16F877AClintonSemanate100% (1)
- Compuertas Logicas Con Tecnologia TTLDocumento11 páginasCompuertas Logicas Con Tecnologia TTLjose_sanguino_2Aún no hay calificaciones
- PIC18F4550Documento105 páginasPIC18F4550Carlos Martinez JuarezAún no hay calificaciones
- Acerca Del Uc STM32F103C8T6Documento7 páginasAcerca Del Uc STM32F103C8T6emilio salas estradaAún no hay calificaciones
- Inf Lab MicrocontraladoresDocumento10 páginasInf Lab MicrocontraladoresNuñez Jeff StAún no hay calificaciones
- Tecnológico de Estudios Superiores de JocotitlánDocumento7 páginasTecnológico de Estudios Superiores de JocotitlánEmmanuel GonzalezAún no hay calificaciones
- Descripcion Pic 16F877ADocumento9 páginasDescripcion Pic 16F877AAndres Camilo RubianoAún no hay calificaciones
- LPCOpen LPC13xx ADCDocumento5 páginasLPCOpen LPC13xx ADCyenhy angelAún no hay calificaciones
- Senati Pic87Documento31 páginasSenati Pic87carlosbuitronAún no hay calificaciones
- GPSGSMPIC1Documento153 páginasGPSGSMPIC1Jeison Ivan AlvaradoAún no hay calificaciones
- Evolupic Bootloader 16f88 Manual v.1Documento29 páginasEvolupic Bootloader 16f88 Manual v.1Jose Diaz PavonAún no hay calificaciones
- InterfasesDocumento16 páginasInterfasesSonny MooreAún no hay calificaciones
- Control TemperaturaDocumento12 páginasControl TemperaturaC. Paolo P.Aún no hay calificaciones
- Proyectos Con Microcontroladores PICDocumento20 páginasProyectos Con Microcontroladores PICsinchyAún no hay calificaciones
- Curso Basico S7-200Documento66 páginasCurso Basico S7-200Ramiro Victoria Alvarez100% (1)
- Reloj Contador CronometroDocumento11 páginasReloj Contador CronometroCristian Granda50% (2)
- ACTIVIDADn1nCONVERSORnADCnPIC 94610f3f4a8fffeDocumento8 páginasACTIVIDADn1nCONVERSORnADCnPIC 94610f3f4a8fffePEDROAún no hay calificaciones
- Resumen Microcontrolador PIC18F4550Documento5 páginasResumen Microcontrolador PIC18F4550Viiktorr Rodriguez50% (2)
- Protocolo Sony SIRCDocumento16 páginasProtocolo Sony SIRCLeninha ValerianoAún no hay calificaciones
- Comunicación RS232Documento29 páginasComunicación RS232Carlos Niño Mendoza100% (1)
- LengEnsambladorSobrePIC16F84 1Documento9 páginasLengEnsambladorSobrePIC16F84 1SancezgarAún no hay calificaciones
- Programación C EEPROM RS232 InterrupcionesDocumento6 páginasProgramación C EEPROM RS232 InterrupcionesAl Bajad MamadAún no hay calificaciones
- Taller 4-Manejo de Registro de DesplazamientoDocumento8 páginasTaller 4-Manejo de Registro de Desplazamientoferney alexander nava trujilloAún no hay calificaciones
- Tarjeta de Adquisicion de Datos UsbDocumento11 páginasTarjeta de Adquisicion de Datos Usbenoksaju6968100% (4)
- Curso de Programacion en C para MicroControladores PIC 16F87XXDocumento130 páginasCurso de Programacion en C para MicroControladores PIC 16F87XXqfacuAún no hay calificaciones
- Tutorial Pic16f887Documento43 páginasTutorial Pic16f887pierdonneAún no hay calificaciones
- Programación de Microcontroladores PIC (Aplicación)Documento29 páginasProgramación de Microcontroladores PIC (Aplicación)Alejandro Hernandez Lopez100% (1)
- Reporte CalculadoraDocumento17 páginasReporte CalculadoraManuel De Jesus ValenzuelaAún no hay calificaciones
- Arquitectura Externa Del MicrocontroladorDocumento6 páginasArquitectura Externa Del MicrocontroladorFERNANDO RIOS CORTESAún no hay calificaciones
- Monografia de ArduinoDocumento19 páginasMonografia de ArduinoGustavo Leyva Espezúa100% (1)
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaAún no hay calificaciones
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)
- Arduino. Trucos y secretos.: 120 ideas para resolver cualquier problemaDe EverandArduino. Trucos y secretos.: 120 ideas para resolver cualquier problemaCalificación: 5 de 5 estrellas5/5 (5)
- Compilador C CCS y Simulador Proteus para Microcontroladores PICDe EverandCompilador C CCS y Simulador Proteus para Microcontroladores PICCalificación: 2.5 de 5 estrellas2.5/5 (5)
- Simulación de circuitos electrónicos con OrCAD® PSpice®De EverandSimulación de circuitos electrónicos con OrCAD® PSpice®Aún no hay calificaciones
- Asterisk PBX: Aprenda a crear y diseñar soluciones de telefonía IP desde ceroDe EverandAsterisk PBX: Aprenda a crear y diseñar soluciones de telefonía IP desde ceroCalificación: 5 de 5 estrellas5/5 (1)
- Asterisk PBX: Aprende a crear y diseñar soluciones de telefonía IP desde ceroDe EverandAsterisk PBX: Aprende a crear y diseñar soluciones de telefonía IP desde ceroCalificación: 1 de 5 estrellas1/5 (1)
- Instalación y configuración de periféricos microinformáticos. IFCT0309De EverandInstalación y configuración de periféricos microinformáticos. IFCT0309Aún no hay calificaciones
- MacarioDocumento3 páginasMacarioJCAún no hay calificaciones
- Tarea3 15ODocumento1 páginaTarea3 15OJCAún no hay calificaciones
- Porchia ÍndiceDocumento5 páginasPorchia ÍndiceJCAún no hay calificaciones
- Tarea1 15ODocumento1 páginaTarea1 15OJCAún no hay calificaciones
- Práctica BJTDocumento7 páginasPráctica BJTJCAún no hay calificaciones
- Presentación WLANDocumento27 páginasPresentación WLANJCAún no hay calificaciones
- Y Nacimiento, Serrucho-KawabataDocumento2 páginasY Nacimiento, Serrucho-KawabataJCAún no hay calificaciones
- Practicas LTspiceDocumento18 páginasPracticas LTspiceJCAún no hay calificaciones
- Practicas SimulacionDocumento43 páginasPracticas SimulacionJCAún no hay calificaciones
- Conjugación de VerbosDocumento2 páginasConjugación de VerbosmattatosAún no hay calificaciones
- Unidad 10Documento5 páginasUnidad 10Agustín GiménezAún no hay calificaciones
- Moodle Vs BlackboardDocumento9 páginasMoodle Vs BlackboardWaldy Antonio Reyes SanchezAún no hay calificaciones
- Tegnologia Tarea 1 Secundaria 2.0Documento17 páginasTegnologia Tarea 1 Secundaria 2.0Daniela AlvaradoAún no hay calificaciones
- Direct and Indirect ObjectsDocumento10 páginasDirect and Indirect ObjectsSequoia PajaritosAún no hay calificaciones
- S6 PPT 02 Dosificado - PLC 1Documento21 páginasS6 PPT 02 Dosificado - PLC 1Dayana AlmudenaAún no hay calificaciones
- Fichas: P G J CDocumento414 páginasFichas: P G J CBiblioteca Seminario San JeronimoAún no hay calificaciones
- Estudios Sobre Imaginarios de Ciudades Medias - Ana Silva y Silvia BoggiDocumento11 páginasEstudios Sobre Imaginarios de Ciudades Medias - Ana Silva y Silvia BoggiFredrik Edmund FirthAún no hay calificaciones
- DOCUMENTOSCOPÍADocumento23 páginasDOCUMENTOSCOPÍAEdna L. Mendoza100% (7)
- Mitología EslavaDocumento18 páginasMitología EslavaTere GómezAún no hay calificaciones
- Taller Señalizacion Clase 1Documento21 páginasTaller Señalizacion Clase 1john agudeloAún no hay calificaciones
- Época Indígena - Familias LingûísticasDocumento13 páginasÉpoca Indígena - Familias LingûísticasPaula EspinelAún no hay calificaciones
- Instructivo Aventuri Regional 2022Documento14 páginasInstructivo Aventuri Regional 2022Liliana UlloaAún no hay calificaciones
- Proyecto #4 Del Nivel ElementalDocumento11 páginasProyecto #4 Del Nivel ElementalErick David Macay CruzAún no hay calificaciones
- 1ero - PrimermoduloDocumento193 páginas1ero - PrimermoduloMarcosAún no hay calificaciones
- Fabulas Literarias-Tomas de IriarteDocumento94 páginasFabulas Literarias-Tomas de IriarteisaAún no hay calificaciones
- 4° EdA3 COMDocumento4 páginas4° EdA3 COMyerson alex cardenas quispeAún no hay calificaciones
- Es Liveworksheets Com bx602479drDocumento5 páginasEs Liveworksheets Com bx602479drdalia galarzaAún no hay calificaciones
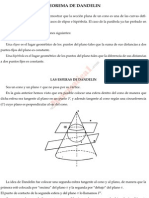
- Teorema de DandelinDocumento6 páginasTeorema de DandelinAMYNNXXXXAún no hay calificaciones
- Tres Narradores Bolivianos ContemporáneosDocumento5 páginasTres Narradores Bolivianos ContemporáneosJulio Meza DiazAún no hay calificaciones
- Manual OrtografíaDocumento38 páginasManual OrtografíaSeguros y PlacasAún no hay calificaciones
- ALABANZADocumento4 páginasALABANZABARBARA YANETH TUTA MARTÍNEZAún no hay calificaciones
- Guía de Lenguaje - Repaso Unidad 1 4toDocumento3 páginasGuía de Lenguaje - Repaso Unidad 1 4toDaniela FernandaAún no hay calificaciones
- Guía N 05 El Lenguaje Academico y Estilos de Redacción (Recuperado Automáticamente)Documento9 páginasGuía N 05 El Lenguaje Academico y Estilos de Redacción (Recuperado Automáticamente)TnoxAún no hay calificaciones
- Grabar ReunionDocumento1 páginaGrabar ReunionGracia yesenia Vargas brausinAún no hay calificaciones
- Gramática. Lingua Castelá E Literatura.-: 1. La Oración Simple.Documento10 páginasGramática. Lingua Castelá E Literatura.-: 1. La Oración Simple.api-415002258Aún no hay calificaciones
- Diagramas AsmDocumento3 páginasDiagramas AsmThemix ValenciaAún no hay calificaciones
- Manejo y Uso de Et CatDocumento56 páginasManejo y Uso de Et CatJuniorz R. Huaylinos Cruz100% (1)
- Álvarez de La Cruz, Tesis, 2014 PDFDocumento276 páginasÁlvarez de La Cruz, Tesis, 2014 PDFDaniel ErazoAún no hay calificaciones
- Map As Men TalesDocumento19 páginasMap As Men TalesRuddy MoranteAún no hay calificaciones