También podría gustarte
- Copia de Análisis PESTEL de La MaracuyaDocumento6 páginasCopia de Análisis PESTEL de La MaracuyaJUAN PABLO ESCOBAR CALDERONAún no hay calificaciones
- Prospeccion y Exploracion en El Yacimiento Mesa de PlataDocumento26 páginasProspeccion y Exploracion en El Yacimiento Mesa de PlatasauloAún no hay calificaciones
- Sulfuros y SulfosalesDocumento29 páginasSulfuros y SulfosalesJAIR ELIAN QUILLAMA PINASCOAún no hay calificaciones
- Taller 5Documento3 páginasTaller 5Charles Camallanqui AlborqueAún no hay calificaciones
- Upn T3 Intro. Ing de MinasDocumento40 páginasUpn T3 Intro. Ing de MinasFernando BecerraAún no hay calificaciones
- Guía para el diseño y funcionamiento de un hatchery para moluscosDocumento14 páginasGuía para el diseño y funcionamiento de un hatchery para moluscosJaqueline ChambillaAún no hay calificaciones
- Fenómenos de transporte en ingeniería agroindustrialDocumento226 páginasFenómenos de transporte en ingeniería agroindustrialYEISON HUARACHA TUPAC100% (2)
- Ejercicios Potencia en Corriente AlternaDocumento18 páginasEjercicios Potencia en Corriente AlternaclauingAún no hay calificaciones
- Modulo Taller III Esno Boquete - ListoDocumento30 páginasModulo Taller III Esno Boquete - ListoAntonio PalmaAún no hay calificaciones
- Guia 4 Minería Del HierroDocumento18 páginasGuia 4 Minería Del HierroJosé Daniel Marañón MolinaAún no hay calificaciones
- Método de Explotación Bentonita FinalDocumento10 páginasMétodo de Explotación Bentonita FinalAlexander Albert100% (1)
- Terremoto de Cariaco Trabajo OriginalDocumento25 páginasTerremoto de Cariaco Trabajo OriginalJose SalazarAún no hay calificaciones
- Roca AnfibolitaDocumento4 páginasRoca AnfibolitaSting J. SCAún no hay calificaciones
- Flotación en Mina AndaychaguaDocumento13 páginasFlotación en Mina Andaychaguafelipe perez huamaniAún no hay calificaciones
- Optimizacion en FlotacionDocumento72 páginasOptimizacion en FlotacionMiguel Angel Pardave BarzolaAún no hay calificaciones
- Tipos de flotación mineralDocumento2 páginasTipos de flotación mineralAriel MartinezAún no hay calificaciones
- Informe de Sistema de Bombeo de Agua en El PerúDocumento6 páginasInforme de Sistema de Bombeo de Agua en El PerúMiguel Noriega RiscoAún no hay calificaciones
- Proyecto minero Antamina, Cobre en AncashDocumento16 páginasProyecto minero Antamina, Cobre en Ancashss ReyesAún no hay calificaciones
- Economía y Evaluación Minera (Antamina)Documento27 páginasEconomía y Evaluación Minera (Antamina)Jeancarlos Canchari VilchezAún no hay calificaciones
- Análisis GranulométricoDocumento24 páginasAnálisis GranulométricoSebastian Jorquera HenriquezAún no hay calificaciones
- Informe 1 Laboratorio Maquinas 2 161128163301Documento4 páginasInforme 1 Laboratorio Maquinas 2 161128163301Anonymous uyF30ntAún no hay calificaciones
- Mina MorocochaDocumento22 páginasMina MorocochaERNESTOAún no hay calificaciones
- Unidad 2. Yacimientos de Minerales Auriferos 1Documento30 páginasUnidad 2. Yacimientos de Minerales Auriferos 1Francisco CJAún no hay calificaciones
- Examne de Petrologia 2020Documento3 páginasExamne de Petrologia 2020Eber Alarcon100% (1)
- Concentracion ElectrostaticaDocumento11 páginasConcentracion ElectrostaticaKevin RojasAún no hay calificaciones
- PERFIL DEL PROYECTO MINERO - Santa CruzDocumento25 páginasPERFIL DEL PROYECTO MINERO - Santa CruzcarloscentellavAún no hay calificaciones
- Principales Servicios Auxiliares de La Empresa Minera Yanacocha PDFDocumento9 páginasPrincipales Servicios Auxiliares de La Empresa Minera Yanacocha PDFJoelRodriguezAún no hay calificaciones
- CianuraciónDocumento22 páginasCianuraciónElvis Jhoan Herrera MelchorAún no hay calificaciones
- Certificado de No AfectacionDocumento2 páginasCertificado de No AfectacionCarlos Enrique Rivas OrtizAún no hay calificaciones
- Informe de La Planta Concentradora de JangasDocumento21 páginasInforme de La Planta Concentradora de JangasRay Kolard Huerta Sotelo100% (1)
- Reducción tamaño mineralesDocumento34 páginasReducción tamaño mineralesClaudia AriasAún no hay calificaciones
- 27 Proyecto La ZanjaDocumento1 página27 Proyecto La ZanjaGerson CaychoAún no hay calificaciones
- Titulacion Acido-BaseDocumento7 páginasTitulacion Acido-BaseErick MendezAún no hay calificaciones
- Terminal de embarque y faja hermética para transporte de minerales en el CallaoDocumento20 páginasTerminal de embarque y faja hermética para transporte de minerales en el CallaoMerly Jimenez SaavedraAún no hay calificaciones
- Cerro VerdeDocumento9 páginasCerro Verdejavier cornejoAún no hay calificaciones
- Compositos - Datos CompartidosDocumento15 páginasCompositos - Datos CompartidosjhoanAún no hay calificaciones
- Clase 4 - Operaciones de MuestreoDocumento44 páginasClase 4 - Operaciones de MuestreoDavid Calderon Mamani100% (1)
- Dokumen - Tips Bombas WilfleyDocumento14 páginasDokumen - Tips Bombas WilfleyRaulAún no hay calificaciones
- Informe Altimetría y Planimetría en Minería - TopografíaDocumento173 páginasInforme Altimetría y Planimetría en Minería - TopografíaJoseAún no hay calificaciones
- Mina Cobriza ListoDocumento10 páginasMina Cobriza ListoRoger Yopla huamanAún no hay calificaciones
- PDF Plan de Tesis Minera Colquisiri - CompressDocumento40 páginasPDF Plan de Tesis Minera Colquisiri - CompressangieAún no hay calificaciones
- Diagramas Planta CabildoDocumento18 páginasDiagramas Planta CabildojaimeasdAún no hay calificaciones
- 5.1 Gestión Del Aire ComprimidoDocumento89 páginas5.1 Gestión Del Aire ComprimidoElizabeth Lecca LujanAún no hay calificaciones
- Segundo Examen Del Curso de Ventilacion de MinasDocumento4 páginasSegundo Examen Del Curso de Ventilacion de MinasBenancio CastroAún no hay calificaciones
- Informe CaratulaDocumento1 páginaInforme CaratulaViviana Katherine La Madrid MelendezAún no hay calificaciones
- Metodo de Isolineas ResumenDocumento3 páginasMetodo de Isolineas Resumendanielbt92Aún no hay calificaciones
- F001-4753 01 PDFDocumento1 páginaF001-4753 01 PDFLuis Del CarmenAún no hay calificaciones
- Informe TambillosDocumento10 páginasInforme Tambillospaulina yañezAún no hay calificaciones
- Minerales peruanos y el hombre más antiguo del PerúDocumento1 páginaMinerales peruanos y el hombre más antiguo del PerúSandra ValdezAún no hay calificaciones
- Cama de Plomo - PirometalurgiaDocumento10 páginasCama de Plomo - PirometalurgiaDennis Ruben Vilcapoma RomoAún no hay calificaciones
- Sesión 2 - Máquinas Perforadoras de Arranque IndirectoDocumento9 páginasSesión 2 - Máquinas Perforadoras de Arranque IndirectoJonathan Pier Linarez LaizaAún no hay calificaciones
- Mina Olympic DamDocumento15 páginasMina Olympic DamMakarena BrasquiAún no hay calificaciones
- Resumen Glosario MineroDocumento12 páginasResumen Glosario MineroMiguelLeonardoHerreraAún no hay calificaciones
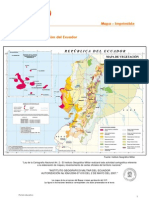
- Mapa1ecu Vegetacion Alumno ToDocumento1 páginaMapa1ecu Vegetacion Alumno ToSalomón Ramírez100% (1)
- Método Shrinkage Exposición GRUPO 6Documento22 páginasMétodo Shrinkage Exposición GRUPO 6EDSON JUNIOR PALPAN LEONAún no hay calificaciones
- Minas Del PerúDocumento21 páginasMinas Del PerúIvan MaicoAún no hay calificaciones
- Examen FinalDocumento4 páginasExamen Finalmanuel100% (1)
- Riego en La MineriaDocumento14 páginasRiego en La MineriaLaura MilaAún no hay calificaciones
- Conceptos Básicos de Yacimientos MineralesDocumento54 páginasConceptos Básicos de Yacimientos MineralesSimbolo de PazAún no hay calificaciones
- Contaminacion MiramarDocumento13 páginasContaminacion MiramarEdgardo Tafur BarbosaAún no hay calificaciones
- Yacimientos Sierra EcuatorianaDocumento16 páginasYacimientos Sierra EcuatorianaAngêl Vladïmïr CuêncaAún no hay calificaciones
- Clases de MotoresDocumento8 páginasClases de MotoresJulinho M LeOnAún no hay calificaciones
- MOTOR Síncrono y AsincronoDocumento29 páginasMOTOR Síncrono y AsincronoJuanD.LópezAún no hay calificaciones
- Motor SincronoDocumento11 páginasMotor SincronoElPapuAún no hay calificaciones
- ManualdeproyectosDocumento246 páginasManualdeproyectosDepartamento de Lengua Castellana y Comunicación100% (9)
- Escritorio - Acceso Directo - LNKDocumento2 páginasEscritorio - Acceso Directo - LNKJaqueline ChambillaAún no hay calificaciones
- EmbarcacionesDocumento18 páginasEmbarcacionesJaqueline ChambillaAún no hay calificaciones
- Universidad Nacional Jorge Basadre Grohmann Facultad de Ciencias Agropecuarias - EsipDocumento3 páginasUniversidad Nacional Jorge Basadre Grohmann Facultad de Ciencias Agropecuarias - EsipJaqueline ChambillaAún no hay calificaciones
- Motivación personal: teorías y procesosDocumento17 páginasMotivación personal: teorías y procesosJaqueline ChambillaAún no hay calificaciones
- Trabajo Integrador 2 EsipDocumento1 páginaTrabajo Integrador 2 EsipJaqueline ChambillaAún no hay calificaciones
- Caratula 2Documento3 páginasCaratula 2Jaqueline ChambillaAún no hay calificaciones
- Trabajo Integrador 2 EsipDocumento1 páginaTrabajo Integrador 2 EsipJaqueline ChambillaAún no hay calificaciones
- LagamitanaexponerDocumento27 páginasLagamitanaexponerJaqueline ChambillaAún no hay calificaciones
- Motivación personal: teorías y procesosDocumento17 páginasMotivación personal: teorías y procesosJaqueline ChambillaAún no hay calificaciones
- Motivación personal: teorías y procesosDocumento17 páginasMotivación personal: teorías y procesosJaqueline ChambillaAún no hay calificaciones
- Motivación personal: teorías y procesosDocumento17 páginasMotivación personal: teorías y procesosJaqueline ChambillaAún no hay calificaciones
- Motivación personal: teorías y procesosDocumento17 páginasMotivación personal: teorías y procesosJaqueline ChambillaAún no hay calificaciones
- Especificaciones Tecnicas Conservas de AtunDocumento5 páginasEspecificaciones Tecnicas Conservas de AtunMAIVOALIANZA100% (1)
- UNIDAD I (1) - LiderazgoDocumento25 páginasUNIDAD I (1) - LiderazgoJaqueline ChambillaAún no hay calificaciones
- Engorde Del Pacu en JaulasDocumento96 páginasEngorde Del Pacu en Jaulascelia cjanahuire100% (2)
- Diseño y selección de procesos productivosDocumento23 páginasDiseño y selección de procesos productivosDaniel Vargas M100% (2)
- Unidad IDocumento41 páginasUnidad IJaqueline ChambillaAún no hay calificaciones
- Calculos PMLDocumento152 páginasCalculos PMLJaqueline ChambillaAún no hay calificaciones
- Proceso porciones perico congeladoDocumento6 páginasProceso porciones perico congeladoJaqueline ChambillaAún no hay calificaciones
- Evaluacion de Gestion de Calidad Empresa Pesquera-Harina de Pescado 2015 PDFDocumento73 páginasEvaluacion de Gestion de Calidad Empresa Pesquera-Harina de Pescado 2015 PDFCesar LapaAún no hay calificaciones
- Tacna pride mural activityDocumento5 páginasTacna pride mural activityJaqueline ChambillaAún no hay calificaciones
- Capitulo3 PDFDocumento15 páginasCapitulo3 PDFKenneth SaganAún no hay calificaciones
- d.s.040 Norma Pesquera para Las Actividades Pesqueras y AcuicolasDocumento43 páginasd.s.040 Norma Pesquera para Las Actividades Pesqueras y AcuicolasCesar Jesus AzariasAún no hay calificaciones
- Acordonamiento de Sistemas Acuáticos 2Documento25 páginasAcordonamiento de Sistemas Acuáticos 2Jaqueline ChambillaAún no hay calificaciones
- Datos ADocumento1 páginaDatos AJaqueline ChambillaAún no hay calificaciones
- Tacna HermosaDocumento1 páginaTacna HermosaSandro AroAún no hay calificaciones
- MetalDocumento40 páginasMetalJaqueline ChambillaAún no hay calificaciones
- Flavonoides y sus propiedades antioxidantesDocumento3 páginasFlavonoides y sus propiedades antioxidantesJaqueline ChambillaAún no hay calificaciones
- Circuitos rectificadores limitadoresDocumento3 páginasCircuitos rectificadores limitadoresEmirRodriguezTualaAún no hay calificaciones
- Clase - 08 ETN606Documento10 páginasClase - 08 ETN606FerchoAún no hay calificaciones
- Electricidad - Basica MODULO 1 The RELLATDocumento114 páginasElectricidad - Basica MODULO 1 The RELLATDavid CoboAún no hay calificaciones
- Guía Ejercicios Ondas Física ColegioDocumento3 páginasGuía Ejercicios Ondas Física ColegioBastian Vargas Zúñiga33% (6)
- Guia de Trabajo Fisica CLEIM 5 No. 1-4Documento10 páginasGuia de Trabajo Fisica CLEIM 5 No. 1-4José Barrios PachecoAún no hay calificaciones
- Ka5q Sustituto STRDocumento6 páginasKa5q Sustituto STRHernan Ortiz Enamorado100% (1)
- Memoria Descriptiva Instalaciones ElectricasDocumento3 páginasMemoria Descriptiva Instalaciones ElectricasIngIngAún no hay calificaciones
- Informe6 TellegenDocumento3 páginasInforme6 TellegenUma UmaAún no hay calificaciones
- Guia Circuito Electrico - DocjuanDocumento11 páginasGuia Circuito Electrico - DocjuanPhillip HarrisAún no hay calificaciones
- Inf Lab Circuitos ADocumento17 páginasInf Lab Circuitos AEnrique AtencioAún no hay calificaciones
- ACFrOgAxgQOwLQdadXun d9bav1oCgxkrJ6JyyuN6UOQkrHqlMV5I6xFaPwikbES2h1EPrk YqvgzHc4SA0CMk L NZKTF 49K8cvuVFT4 zOelQvY7zLGozPPylkEBBs3DEkbn4YarpRH - 5jH9Documento11 páginasACFrOgAxgQOwLQdadXun d9bav1oCgxkrJ6JyyuN6UOQkrHqlMV5I6xFaPwikbES2h1EPrk YqvgzHc4SA0CMk L NZKTF 49K8cvuVFT4 zOelQvY7zLGozPPylkEBBs3DEkbn4YarpRH - 5jH9vicente maiaAún no hay calificaciones
- 09 Estatica II (Test)Documento8 páginas09 Estatica II (Test)Remy Huaman Cano100% (2)
- Ciencia y MedicionDocumento7 páginasCiencia y MedicionMariana M.Aún no hay calificaciones
- UP01 PC Campo Grav BACT2BDocumento6 páginasUP01 PC Campo Grav BACT2BRaycoAún no hay calificaciones
- Metodo de Prospección MagnéticaDocumento36 páginasMetodo de Prospección MagnéticaJose Miguel Rincon AngaritaAún no hay calificaciones
- Informe de Frenos de ValvulasDocumento26 páginasInforme de Frenos de ValvulasLimbert TiconaAún no hay calificaciones
- Prob Dinam ParticulDocumento65 páginasProb Dinam ParticulJoel CruzAún no hay calificaciones
- UNIDAD-5 Tiristores y OptoacopladoresDocumento10 páginasUNIDAD-5 Tiristores y OptoacopladoresEduardo FPAún no hay calificaciones
- Memoria Tecnica 1Documento19 páginasMemoria Tecnica 1lucasAún no hay calificaciones
- Examen Subestaciones Eléctricas: Preguntas sobre Descargas, Transformadores, ProteccionesDocumento2 páginasExamen Subestaciones Eléctricas: Preguntas sobre Descargas, Transformadores, ProteccionesNicolásBenítez100% (1)
- Examen Dinamica Soluciones Ejercicios ExtrasDocumento7 páginasExamen Dinamica Soluciones Ejercicios ExtrasAntonio MarquezAún no hay calificaciones
- Montaña RusaDocumento13 páginasMontaña RusaClaudia Ballesteros Aranda100% (1)
- Proyecto Final Física y Química SenatiDocumento5 páginasProyecto Final Física y Química SenatiSteven ValeraAún no hay calificaciones
- 00376520960IM07S11036315PREGUNTASTEoRICAS SESIoN1Documento3 páginas00376520960IM07S11036315PREGUNTASTEoRICAS SESIoN1JORGE EDUARDO TORRES HUAMANAún no hay calificaciones
- Sesion7 Fisica 3er 25 06Documento5 páginasSesion7 Fisica 3er 25 06Jhosteing MoralesAún no hay calificaciones
- Quimica R 3Documento2 páginasQuimica R 3Pedro Anibal Mendoza LuichoAún no hay calificaciones