También podría gustarte
- Escalado de Entrada AnalogicaDocumento2 páginasEscalado de Entrada AnalogicaDavid Laurente100% (1)
- Proyecto Final sc2Documento13 páginasProyecto Final sc2JUAN LOPEZ67% (6)
- Procedimiento de Trabajo Seguro para Realizar Hot TapDocumento34 páginasProcedimiento de Trabajo Seguro para Realizar Hot TapBruno AlcocerAún no hay calificaciones
- HRT2MDB Datasheet EsDocumento3 páginasHRT2MDB Datasheet EstinchusAún no hay calificaciones
- 1511 Manual Completo PDFDocumento52 páginas1511 Manual Completo PDFRiverosNikoAún no hay calificaciones
- 01 - Conexion Remota A EquiposDocumento19 páginas01 - Conexion Remota A EquiposEva SuárezAún no hay calificaciones
- Cimentacion Por FlotacionDocumento5 páginasCimentacion Por Flotacionjordi perez75% (4)
- Operatividad de Las Tarjetas de CréditoDocumento20 páginasOperatividad de Las Tarjetas de CréditoElba XepAún no hay calificaciones
- Funcionamiento FB41Documento16 páginasFuncionamiento FB41jaimeasisaAún no hay calificaciones
- Simulación Server OPC+clienteOPC - Server - ABBDocumento22 páginasSimulación Server OPC+clienteOPC - Server - ABBJose Antonio MercadoAún no hay calificaciones
- STEP 7 MicroWIN (Instrucciones)Documento7 páginasSTEP 7 MicroWIN (Instrucciones)Kebyn Juan Pariona Achata100% (1)
- Unidades Remotas de TelemetriaDocumento34 páginasUnidades Remotas de TelemetriaPolChris ChasiAún no hay calificaciones
- Práctica TIA Portal-FluidSiM PDFDocumento4 páginasPráctica TIA Portal-FluidSiM PDFAlyan ZaeAún no hay calificaciones
- Almacenamiento de Datos y Sistemas de Supervision SCADADocumento3 páginasAlmacenamiento de Datos y Sistemas de Supervision SCADAAlma Delia CorralesAún no hay calificaciones
- 1093 Espanol Reloj GpsDocumento4 páginas1093 Espanol Reloj GpsDavid A. D'LimaAún no hay calificaciones
- Practica 4Documento7 páginasPractica 4David Torres HerreraAún no hay calificaciones
- LAB7 Modbus RTUDocumento14 páginasLAB7 Modbus RTUDemian WayneAún no hay calificaciones
- Control PID en SiemensDocumento522 páginasControl PID en SiemensJose BrizuelaAún no hay calificaciones
- 46679584-Practicas-LabView PidDocumento32 páginas46679584-Practicas-LabView PidCesar GraciaAún no hay calificaciones
- Qué Es Un DaserverDocumento4 páginasQué Es Un DaserverAndresinho SievchenkoAún no hay calificaciones
- Variador de VelocidadDocumento13 páginasVariador de VelocidadJionni Dlzma100% (1)
- Liquiline CM42 Abreviado EspañolDocumento44 páginasLiquiline CM42 Abreviado EspañolJosé Esteban Mascareña VázquezAún no hay calificaciones
- TIA Portal v13 Añadir Archivos GSD ProfibusDocumento6 páginasTIA Portal v13 Añadir Archivos GSD Profibusdavid_diaz_sAún no hay calificaciones
- Modbus RtuDocumento15 páginasModbus RtuJUAN PABLO SANABRIA VELANDIAAún no hay calificaciones
- Modbus y Modbus PlusDocumento17 páginasModbus y Modbus PlusAlain JCAún no hay calificaciones
- Micrologix 1100 AnalogicasDocumento27 páginasMicrologix 1100 AnalogicasFranco ZahirAún no hay calificaciones
- Vega Opazo Darwin Antonio DeltavDocumento95 páginasVega Opazo Darwin Antonio DeltavTextos Para SecundariaAún no hay calificaciones
- Periferia Descentralizada Et200Documento36 páginasPeriferia Descentralizada Et200simon107Aún no hay calificaciones
- B063 T530-Compact Control Builder AC800M-ConfigDocumento1 páginaB063 T530-Compact Control Builder AC800M-ConfigJuan Pablo CondoriAún no hay calificaciones
- Iniciar y Configurar DeskLock Con FactoryTalk View MEDocumento5 páginasIniciar y Configurar DeskLock Con FactoryTalk View MEBenito PrisdelAún no hay calificaciones
- Capitulo 5 - BalotarioDocumento2 páginasCapitulo 5 - BalotarioRodrigo LaucataAún no hay calificaciones
- Arquitectura de Los Sistemas de Control Distribuidos DCSDocumento6 páginasArquitectura de Los Sistemas de Control Distribuidos DCSCyberspawn Quien Sabe100% (1)
- Aplicaciones DistribuidasDocumento11 páginasAplicaciones DistribuidasLcda. Ekmairen Valecillos100% (1)
- Manual PLC 5 PDFDocumento194 páginasManual PLC 5 PDFmaymonrAún no hay calificaciones
- CLASE 3 Temporizadores CEI y Contadores CEI en SCE ES 010-030 R1209 S7-1200 Zeiten ZählerDocumento54 páginasCLASE 3 Temporizadores CEI y Contadores CEI en SCE ES 010-030 R1209 S7-1200 Zeiten ZählerZanesLTAún no hay calificaciones
- Informe Controladores PLC - DCSDocumento9 páginasInforme Controladores PLC - DCSJenry MurilloAún no hay calificaciones
- Lab 3Documento25 páginasLab 3Sergio A Purizaca GallegoAún no hay calificaciones
- L Red Eye 2G Water-Cut Meter SpanishDocumento4 páginasL Red Eye 2G Water-Cut Meter SpanishRaul DiazAún no hay calificaciones
- PDF Laboratorio N Redes IndustrialesDocumento23 páginasPDF Laboratorio N Redes IndustrialesOrlando Gregory Madariaga MamaniAún no hay calificaciones
- FactoryTalk View StudioDocumento3 páginasFactoryTalk View StudioDany MecAún no hay calificaciones
- Normas SAMA PDFDocumento16 páginasNormas SAMA PDFIsai Resendiz0% (1)
- DCS - Plantpax 3.0Documento48 páginasDCS - Plantpax 3.0Jairo FuenzalidaAún no hay calificaciones
- ArchestrA IDEDocumento3 páginasArchestrA IDEHenry VacaAún no hay calificaciones
- Guia PLC Basico FestoDocumento23 páginasGuia PLC Basico FestohectorlpAún no hay calificaciones
- Mensajeria Rslogix5000Documento10 páginasMensajeria Rslogix5000Diego Andrès OjedaAún no hay calificaciones
- Lab 09 - Sup FTVDocumento27 páginasLab 09 - Sup FTVFernando Julio Ccama AlvarezAún no hay calificaciones
- Pantalla HMI Con PLCDocumento15 páginasPantalla HMI Con PLCXavier PanamaAún no hay calificaciones
- Bases de Automatización Concurso de PLCDocumento14 páginasBases de Automatización Concurso de PLCCarlos Walter Otiniano NoéAún no hay calificaciones
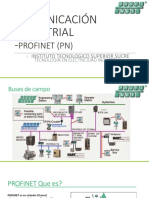
- ProfinetpnDocumento41 páginasProfinetpnLuisDavidStarkAún no hay calificaciones
- Hart Honeywells PDFDocumento132 páginasHart Honeywells PDFglenysyaAún no hay calificaciones
- Autonics CT6S-1PDocumento2 páginasAutonics CT6S-1PFrank CruzAún no hay calificaciones
- Capitulo 2Documento21 páginasCapitulo 2ghodghod123Aún no hay calificaciones
- Interfaz Hombre MáquinaDocumento11 páginasInterfaz Hombre MáquinaDaniela LesmesAún no hay calificaciones
- DcsDocumento7 páginasDcsIgnacio Antonio Arevalo Budaleo100% (1)
- Autómatas Programables II: Regulación PIDDocumento35 páginasAutómatas Programables II: Regulación PIDJhezy Andron AndronAún no hay calificaciones
- Laboratorio de Fundamentos de Control PDFDocumento6 páginasLaboratorio de Fundamentos de Control PDFrr_vlAún no hay calificaciones
- PID - Caudal - TKNIKA - ACTIVIDAD 5.2. - Regulaci - N de Caudal (PR - Ctica)Documento26 páginasPID - Caudal - TKNIKA - ACTIVIDAD 5.2. - Regulaci - N de Caudal (PR - Ctica)scribduqueAún no hay calificaciones
- Practica Controladores PID Unam FIDocumento9 páginasPractica Controladores PID Unam FIOctavio Alamillo MoctezumaAún no hay calificaciones
- Descargar PlantillaDocumento13 páginasDescargar PlantillaJUAN LOPEZAún no hay calificaciones
- El Chido LiroDocumento7 páginasEl Chido LiroLAlo EleAún no hay calificaciones
- Implementación PID en El PLC1Documento25 páginasImplementación PID en El PLC1Lenin RamirezAún no hay calificaciones
- Topologías de ControlDocumento13 páginasTopologías de ControlEzequiel CurinaoAún no hay calificaciones
- Diseño y Ajuste de Controladores PidDocumento13 páginasDiseño y Ajuste de Controladores PidNABEAún no hay calificaciones
- Coes Sinac PR - 26: Procedimiento Técnico Del Comité de Operación Económica Del Sinac Cálculo de La Potencia FirmeDocumento9 páginasCoes Sinac PR - 26: Procedimiento Técnico Del Comité de Operación Económica Del Sinac Cálculo de La Potencia FirmeDavid Jose Poma GuillenAún no hay calificaciones
- Estudio Límites de TransmisiónDocumento60 páginasEstudio Límites de TransmisiónRicardo HernandezAún no hay calificaciones
- Analisis Generacion Eolica IIDocumento11 páginasAnalisis Generacion Eolica IIouveo2569Aún no hay calificaciones
- Equivalente de Redes Electricas para Analisis de Transitorios ElectromagneticosDocumento0 páginasEquivalente de Redes Electricas para Analisis de Transitorios ElectromagneticosDavid Jose Poma GuillenAún no hay calificaciones
- Seguridad Electrica en Instalaciones PetrolerasDocumento7 páginasSeguridad Electrica en Instalaciones PetrolerasDavid Jose Poma Guillen100% (1)
- Normatividad en Tableros de Baja y Media Tension SchneiderDocumento66 páginasNormatividad en Tableros de Baja y Media Tension SchneiderDavid Jose Poma Guillen100% (2)
- Reles para Control y Bornes SchneiderDocumento48 páginasReles para Control y Bornes SchneiderDavid Jose Poma Guillen100% (1)
- Etapa2 - 38 - Andres CasallasDocumento16 páginasEtapa2 - 38 - Andres CasallasAndres Pipe CasallasAún no hay calificaciones
- Definición de Auditoría PDFDocumento2 páginasDefinición de Auditoría PDFEdson LópezAún no hay calificaciones
- Cronograma de Avance de Obra Actualizado MayoDocumento682 páginasCronograma de Avance de Obra Actualizado MayoMarino Germán Fonseca DávilaAún no hay calificaciones
- Flotación BatchDocumento12 páginasFlotación BatchDaniel Ruiz Puebla100% (2)
- Plan de Recursos PropiosDocumento5 páginasPlan de Recursos PropiosMarcelino Prudencio100% (1)
- El Medio Ambiente Es El Sistema Global Constituido Por Elementos Naturales y Artificiales de Naturaleza FísicaDocumento8 páginasEl Medio Ambiente Es El Sistema Global Constituido Por Elementos Naturales y Artificiales de Naturaleza FísicaAngel GomezAún no hay calificaciones
- JF 2 4 EspDocumento29 páginasJF 2 4 EspCésar PerezAún no hay calificaciones
- AutorregulacionDocumento263 páginasAutorregulacionFernando Gonzalez LunaAún no hay calificaciones
- HP Pu70Documento5 páginasHP Pu70jhonnyAún no hay calificaciones
- Modelo HumanistaDocumento2 páginasModelo HumanistaSheyla Rumiche100% (2)
- Poes SenaDocumento8 páginasPoes SenaelizaAún no hay calificaciones
- 7 Diferentes Tipos de LecturaDocumento4 páginas7 Diferentes Tipos de LecturaANTONIETAAún no hay calificaciones
- Manual para Uso de ScribdDocumento13 páginasManual para Uso de ScribdAurelia Soto100% (2)
- Entrevista Ezio ManziniDocumento3 páginasEntrevista Ezio ManziniIne HornosAún no hay calificaciones
- Modelo de Aprendizaje Basado en Problemas ABPDocumento15 páginasModelo de Aprendizaje Basado en Problemas ABPAndrés Felimón Cazares Valdiviezo100% (1)
- Gcap U1 A2Documento3 páginasGcap U1 A2MOISESAún no hay calificaciones
- Manual Vag ComDocumento59 páginasManual Vag ComClaudia Tita100% (6)
- Brochure PasantiaDocumento6 páginasBrochure PasantiahansAún no hay calificaciones
- Caso 2 Evaluacion SGCDocumento6 páginasCaso 2 Evaluacion SGCKevin Alejandro Vina TorresAún no hay calificaciones
- Trabajo 16 22 Segunda ParteDocumento7 páginasTrabajo 16 22 Segunda ParteJair GaribayAún no hay calificaciones
- Caja Ejes ParalelosDocumento12 páginasCaja Ejes ParalelosPatrick MarínAún no hay calificaciones
- Manual Reparacion Componentes Sistema Hidraulico Camion 930e 4 KomatsuDocumento18 páginasManual Reparacion Componentes Sistema Hidraulico Camion 930e 4 KomatsuAle FierroAún no hay calificaciones
- Formatos EDAN - 2009 MODIFICADODocumento11 páginasFormatos EDAN - 2009 MODIFICADOcristianAún no hay calificaciones
- It EssentialsDocumento2 páginasIt EssentialsRodrigo Villanueva CamposAún no hay calificaciones
- MF Examen Final 2021B MDocumento5 páginasMF Examen Final 2021B MJerick MinayaAún no hay calificaciones
- Cómo Se Utiliza Python y Django en MejorandoDocumento72 páginasCómo Se Utiliza Python y Django en MejorandoMijael ColquehuancaAún no hay calificaciones
- Bingo HistoriaDocumento12 páginasBingo HistoriaRamirez FrankAún no hay calificaciones