También podría gustarte
- Ejercicios de Trabajo Virtual y Teorema de CastiglianoDocumento4 páginasEjercicios de Trabajo Virtual y Teorema de CastiglianoAlex Farfán100% (1)
- INANNA - Cantos e Himnos de SumeriaDocumento89 páginasINANNA - Cantos e Himnos de Sumeriaדוד יו100% (2)
- Demostración de Ecuaciones de Pendiente DeflexiónDocumento12 páginasDemostración de Ecuaciones de Pendiente DeflexiónJoseluish ItapizacoAún no hay calificaciones
- Metodo Matricial de RigidezDocumento104 páginasMetodo Matricial de Rigidezedicson1a88% (60)
- Metdod de CastiglianoDocumento16 páginasMetdod de CastiglianoAndres Salmeron92% (26)
- UNIDAD III - Metodo de Las FuerzasDocumento40 páginasUNIDAD III - Metodo de Las FuerzasDaniel RuizAún no hay calificaciones
- Método de La Rigidez y de La FlexibilidadDocumento15 páginasMétodo de La Rigidez y de La FlexibilidadGott Segne Sie100% (3)
- 6 - Vigas Continuas y Porticos (Método de Las Fuerzas)Documento30 páginas6 - Vigas Continuas y Porticos (Método de Las Fuerzas)SebastiánRiosAún no hay calificaciones
- Examen Final Mecánica de Materiales 2020-01 (Temario A)Documento9 páginasExamen Final Mecánica de Materiales 2020-01 (Temario A)gustavo vegaAún no hay calificaciones
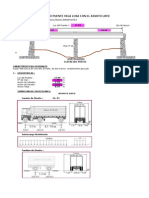
- Hoja de Calculo Puente Viga Losa-Diseño de Viga (Configurado 14 Mayo 2011)Documento138 páginasHoja de Calculo Puente Viga Losa-Diseño de Viga (Configurado 14 Mayo 2011)extable100% (7)
- Metodo de MacaulayDocumento8 páginasMetodo de MacaulayW.A. PortilloAún no hay calificaciones
- La Actividad Minera en La Provincia de Jujuy en El Siglo XXI, Sus Nuevas Caracteristicas ProductivasDocumento13 páginasLa Actividad Minera en La Provincia de Jujuy en El Siglo XXI, Sus Nuevas Caracteristicas ProductivasEzequiel Acosta GarcíaAún no hay calificaciones
- Mapa Region Ancash PDFDocumento1 páginaMapa Region Ancash PDFrafito007100% (1)
- Metodo Area de Momentos - Teoria y EjerciciosDocumento15 páginasMetodo Area de Momentos - Teoria y EjerciciosDanilo Hernandez89% (9)
- Intensivo 2Documento37 páginasIntensivo 2Abu PSAún no hay calificaciones
- Grado de Hiperestaticidad-1Documento21 páginasGrado de Hiperestaticidad-1Licé AmezAún no hay calificaciones
- Semana 02. - Terreno de FundacionDocumento28 páginasSemana 02. - Terreno de FundacionPaola Guevara IdrogoAún no hay calificaciones
- Diseno de Vigas Perfiles de Acero Método LRFD AceroDocumento6 páginasDiseno de Vigas Perfiles de Acero Método LRFD Acerorafito007Aún no hay calificaciones
- Método de Las Fuerzas-Estructuras HiperestáticasDocumento15 páginasMétodo de Las Fuerzas-Estructuras HiperestáticasDennis Alvarado88% (16)
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Memoriacalculoestructuralcuracaopucallpa2010parte2 121118221620 Phpapp02Documento16 páginasMemoriacalculoestructuralcuracaopucallpa2010parte2 121118221620 Phpapp02Yesenia Yezly100% (1)
- Semana 04 S1 Mrigidez 2323Documento111 páginasSemana 04 S1 Mrigidez 2323MarcoVillónVerásteguiAún no hay calificaciones
- Resistencia IiDocumento13 páginasResistencia IiMaik A Secas0% (1)
- Método de Trabajo VirtualDocumento26 páginasMétodo de Trabajo VirtualYan DcAún no hay calificaciones
- Diseño de Puente LosaDocumento24 páginasDiseño de Puente LosaJuan Carlos Yujra Cruz78% (9)
- Diseño en AceroDocumento77 páginasDiseño en Acerorafito007100% (1)
- Puente Losa - G Ingenieria de PuentesDocumento22 páginasPuente Losa - G Ingenieria de Puentesglidden86% (7)
- CIMENTACIONES - Distribucion de Presiones y Capacidad de CargaDocumento51 páginasCIMENTACIONES - Distribucion de Presiones y Capacidad de Cargahern_n86% (14)
- CIMENTACIONES - Distribucion de Presiones y Capacidad de CargaDocumento51 páginasCIMENTACIONES - Distribucion de Presiones y Capacidad de Cargahern_n86% (14)
- Grado de Indeterminacion 2Documento18 páginasGrado de Indeterminacion 2CristianHerbasPillacaAún no hay calificaciones
- Metodo de La Rigidez y FlexibilidadDocumento65 páginasMetodo de La Rigidez y FlexibilidadGuillermoRamonHuatayDiazAún no hay calificaciones
- Monografia de Porticos y MarcosDocumento24 páginasMonografia de Porticos y MarcosJonne Huanca100% (1)
- Rigidez en Coordenadas de Piso Básico Con CEINCI-LABDocumento20 páginasRigidez en Coordenadas de Piso Básico Con CEINCI-LABInti FermatAún no hay calificaciones
- Teorema de Castigliano para ArmadurasDocumento7 páginasTeorema de Castigliano para ArmadurasLeidys Lange100% (2)
- Método de La Viga ConjugadaDocumento17 páginasMétodo de La Viga ConjugadaYosimar Ortega ClarosAún no hay calificaciones
- Propiedades Físicas y Mecánicas de Unidades de AlbañileriaDocumento7 páginasPropiedades Físicas y Mecánicas de Unidades de AlbañileriaE̶d̶w̶i̶n̶A̶l̶e̶x̶C̶h̶a̶v̶e̶z̶̶G̶u̶t̶i̶e̶r̶r̶e̶z̶100% (1)
- Reflexión de Pórticos Mediante El Método de La Carga UnitariaDocumento15 páginasReflexión de Pórticos Mediante El Método de La Carga UnitariaLiz karinaAún no hay calificaciones
- Taller #01 Dinamica Estructural (Especializacion)Documento2 páginasTaller #01 Dinamica Estructural (Especializacion)Eliana Arango PérezAún no hay calificaciones
- Capitulo-1 Estructuración y Comportamiento de Estructuras Frente A SismoDocumento152 páginasCapitulo-1 Estructuración y Comportamiento de Estructuras Frente A SismoF AGAún no hay calificaciones
- Metodo de FlexibilidadesDocumento25 páginasMetodo de FlexibilidadesDillan Manuel Zarate Vargas0% (1)
- Comparacion - Flexibilidad y RigidezDocumento46 páginasComparacion - Flexibilidad y Rigidezjose rubenAún no hay calificaciones
- Taller Flujo en SuelosDocumento3 páginasTaller Flujo en SuelosCarlos100% (1)
- Ejercicios Propuestos 2Documento5 páginasEjercicios Propuestos 2Evilus Vilela67% (3)
- Cuáles Crees Que Son Las Ventajas y Desventajas de Utilizar La Curva Elástica para Calcular Deflexiones y RotacionesDocumento1 páginaCuáles Crees Que Son Las Ventajas y Desventajas de Utilizar La Curva Elástica para Calcular Deflexiones y RotacionesEsnaider SanchezAún no hay calificaciones
- Historia Dell Metodo de Rigidez - Analisis EstructuralDocumento4 páginasHistoria Dell Metodo de Rigidez - Analisis Estructuralhenry0m.0hurtadoAún no hay calificaciones
- Ensayo Análisis de Cables y ArcosDocumento4 páginasEnsayo Análisis de Cables y Arcosluis_25hotmailcomAún no hay calificaciones
- Informe de MatricialDocumento16 páginasInforme de MatricialJunior Barcianovich Delgadov100% (1)
- Arcos y CablesDocumento78 páginasArcos y CablesGianni Valerie Alejo75% (4)
- Ejercicios de Empuje de TierrraDocumento9 páginasEjercicios de Empuje de Tierrrarodrigo paredes arias50% (2)
- Metodo CrossDocumento8 páginasMetodo Crossmax jhunior taipeAún no hay calificaciones
- Metodo Del PortalDocumento10 páginasMetodo Del Portalelena riosAún no hay calificaciones
- Grados de Libertad en EstructurasDocumento1 páginaGrados de Libertad en EstructurasWilmer Arcaya100% (4)
- INTRODUCCION Matriz de PorticoDocumento27 páginasINTRODUCCION Matriz de PorticocpumamamaniAún no hay calificaciones
- Ejercicios de Diseño de Vigas A FlexionDocumento2 páginasEjercicios de Diseño de Vigas A FlexionHernán Borda DurandAún no hay calificaciones
- Examen Final - Analisis Estructural I - CIV7-2Documento2 páginasExamen Final - Analisis Estructural I - CIV7-2Paolo RonaldoAún no hay calificaciones
- Teorema de Müller-BreslauDocumento8 páginasTeorema de Müller-Breslaueduardo nietoAún no hay calificaciones
- Primera Unidad - 2022Documento28 páginasPrimera Unidad - 2022Carlos GuzmanAún no hay calificaciones
- Vigas Continuas TeoriaDocumento23 páginasVigas Continuas TeoriarachellAún no hay calificaciones
- Metodo Rotaciones AngularesDocumento18 páginasMetodo Rotaciones AngularesGustavo Moya AtahuichiAún no hay calificaciones
- EJERCICIOSDocumento6 páginasEJERCICIOSJonathan Eleazar Serrano MendezAún no hay calificaciones
- Tema Vigas Estaticamente IndeterminadasDocumento15 páginasTema Vigas Estaticamente IndeterminadasCarlos Ckacka cruzAún no hay calificaciones
- 5.1 Problemas Viga Conjugada PDFDocumento9 páginas5.1 Problemas Viga Conjugada PDFCecilia Diez CansecoAún no hay calificaciones
- Examen Mecánica de Extremadura (Ordinaria de 2009) (WWW - Examenesdepau.com)Documento1 páginaExamen Mecánica de Extremadura (Ordinaria de 2009) (WWW - Examenesdepau.com)José Peinado GutiérrezAún no hay calificaciones
- Tema 2Documento37 páginasTema 2luciaAún no hay calificaciones
- 3P 202210 SoluciónDocumento5 páginas3P 202210 SoluciónJotadburgos07Aún no hay calificaciones
- Exposición AnálisisDocumento11 páginasExposición AnálisisSebastian CarvajalAún no hay calificaciones
- Fuerzas Internas Desarrolladas en Elementos EstructuralesDocumento4 páginasFuerzas Internas Desarrolladas en Elementos EstructuralesMoreno Villa Rut AbigailAún no hay calificaciones
- Trabajo GrupalDocumento29 páginasTrabajo GrupalReiGigio SisolosiAún no hay calificaciones
- Metodo de La Viga ConjugadaDocumento15 páginasMetodo de La Viga ConjugadaVictor Santander CahuanticoAún no hay calificaciones
- Semana 13 - Relaciones Entre Intensidad de Carga, Fuerza Cortante y Momento Flector. Calculo Del Máximo y Mínimo de Estas Acciones InternasDocumento31 páginasSemana 13 - Relaciones Entre Intensidad de Carga, Fuerza Cortante y Momento Flector. Calculo Del Máximo y Mínimo de Estas Acciones InternasSmart ConstructionAún no hay calificaciones
- Capítulo 07 - Longitudes Equivalentes de Pandeo PDFDocumento75 páginasCapítulo 07 - Longitudes Equivalentes de Pandeo PDFCalle ThomsonAún no hay calificaciones
- Homografía: Homografía: Transformaciones en Visión por ComputadorDe EverandHomografía: Homografía: Transformaciones en Visión por ComputadorAún no hay calificaciones
- AreasDocumento3 páginasAreasrafito007100% (1)
- Diseño de Estribo (Puentes)Documento2 páginasDiseño de Estribo (Puentes)rafito007100% (1)
- Uns - 2015 - IIDocumento21 páginasUns - 2015 - IIrafito007Aún no hay calificaciones
- Preferente 2015 IIDocumento11 páginasPreferente 2015 IIrafito007Aún no hay calificaciones
- 10.7 - Cuadro de Costos de Operacion R.O. Proyecto Pucusana-SedapalDocumento3 páginas10.7 - Cuadro de Costos de Operacion R.O. Proyecto Pucusana-Sedapalrafito007Aún no hay calificaciones
- Manual de Gaviones PDFDocumento153 páginasManual de Gaviones PDFRaimundo Sáez JenschkeAún no hay calificaciones
- SismicaDocumento120 páginasSismicarafito007Aún no hay calificaciones
- Hidraulica de Tuberias y CanalesDocumento530 páginasHidraulica de Tuberias y CanalesÁngl Pln100% (1)
- TP2 Al 91,67 EstadísticaDocumento10 páginasTP2 Al 91,67 EstadísticaBruno Giardina100% (1)
- Tarea 3.2. Paronimos - Graduandos-1Documento2 páginasTarea 3.2. Paronimos - Graduandos-1José Fernando Camey GuicoyAún no hay calificaciones
- Tabla Análisis JurisprudencialDocumento5 páginasTabla Análisis JurisprudencialmarlinceronAún no hay calificaciones
- Heavy Object Volumen 8Documento229 páginasHeavy Object Volumen 8carlos ramos sanchezAún no hay calificaciones
- Colangitis AgudaDocumento22 páginasColangitis Agudajuan pedroAún no hay calificaciones
- Llareta: Laretia AcaulisDocumento2 páginasLlareta: Laretia AcaulisCarlos AlexisAún no hay calificaciones
- Proyecto Transversal HumanidadesDocumento40 páginasProyecto Transversal HumanidadesDiana Liliana Martinez JimenezAún no hay calificaciones
- MultilateracionDocumento29 páginasMultilateracionmartins79120479Aún no hay calificaciones
- Espinoza y Rodríguez Unidad IVDocumento23 páginasEspinoza y Rodríguez Unidad IVCesar JonathanAún no hay calificaciones
- Exposicion EncuestaDocumento8 páginasExposicion EncuestaDiaz Pacheco OyukiAún no hay calificaciones
- Cromatografia de Capa FinaDocumento3 páginasCromatografia de Capa FinaUziel MartinezAún no hay calificaciones
- Mejoramiento Del Servicio de Apoyo Al UsoDocumento34 páginasMejoramiento Del Servicio de Apoyo Al UsoJordy Alburqueque100% (1)
- Matriz AmbientalDocumento1 páginaMatriz AmbientalJose Luis Garcia OliverAún no hay calificaciones
- El Modelo de Mccall Como Aplicación de La Calidad A La Revision Del Software de Gestion Empresarial - Monografias PDFDocumento7 páginasEl Modelo de Mccall Como Aplicación de La Calidad A La Revision Del Software de Gestion Empresarial - Monografias PDFJuan VelascoAún no hay calificaciones
- Ponencia Salvador Garcia E.Documento6 páginasPonencia Salvador Garcia E.Daphné Ga GaAún no hay calificaciones
- Pro Flex Texturado (v.6)Documento2 páginasPro Flex Texturado (v.6)arturo quezadaAún no hay calificaciones
- Rendimientos CFEDocumento1 páginaRendimientos CFEantonioAún no hay calificaciones
- T 686Documento102 páginasT 686Angel Torres MateoAún no hay calificaciones
- Aguayo 2009Documento14 páginasAguayo 2009Guissela DanielAún no hay calificaciones
- Taller 2 S7Documento4 páginasTaller 2 S7Mar LoAún no hay calificaciones
- El Carbonato de LitioDocumento5 páginasEl Carbonato de LitioCamila Constanza Contador SagredoAún no hay calificaciones
- Vazquez - Abramovich - Experiencias de ESyS en La ArgentinaDocumento13 páginasVazquez - Abramovich - Experiencias de ESyS en La ArgentinamahuitaAún no hay calificaciones
- Taller de RecuperaciónDocumento2 páginasTaller de RecuperaciónMarilins Castro Castro0% (1)
- Unidad 2 - Asignacion de RecursosDocumento49 páginasUnidad 2 - Asignacion de RecursosfacundoAún no hay calificaciones
- Trabajo Tac. Gral.Documento4 páginasTrabajo Tac. Gral.Aracely SandalioAún no hay calificaciones
- Cuales Son Los Elementos y Características Importantes Que Se Necesitan para La Conformación de DichaDocumento2 páginasCuales Son Los Elementos y Características Importantes Que Se Necesitan para La Conformación de DichaJustin AlvarezAún no hay calificaciones
- Clase 01 - Fallas - Componentes SimétricasDocumento43 páginasClase 01 - Fallas - Componentes SimétricasJesus Gabriel Altuna DiazAún no hay calificaciones