También podría gustarte
- Deber 16Documento6 páginasDeber 16Alejo CastroAún no hay calificaciones
- Novales Cinca Alfonso - Econometria - Cap11 - 12Documento42 páginasNovales Cinca Alfonso - Econometria - Cap11 - 12Karla CorreaAún no hay calificaciones
- Gauss LegendreDocumento10 páginasGauss LegendreSteven AyalaAún no hay calificaciones
- Taller 3 Estadística y Probabilidad FinalDocumento7 páginasTaller 3 Estadística y Probabilidad FinalReinita Rivera LinaresAún no hay calificaciones
- REGRESIONDocumento42 páginasREGRESIONJacob R9 Jallaza50% (2)
- Quiz N°3Documento3 páginasQuiz N°3OSCAR IVAN CARDONA PEDREROSAún no hay calificaciones
- 10 Unidad7 PDFDocumento33 páginas10 Unidad7 PDFStephanie RobertsAún no hay calificaciones
- El Modelo Logarítmico Recíproco PDFDocumento33 páginasEl Modelo Logarítmico Recíproco PDFLaura Arango100% (2)
- 5.5 Mínimos Cuadradospdf PDFDocumento10 páginas5.5 Mínimos Cuadradospdf PDFEmmanuelAún no hay calificaciones
- Microsoft Word - CEDEAC-03Documento39 páginasMicrosoft Word - CEDEAC-03Angie AlarconAún no hay calificaciones
- Contenido Activador Unidad 3 EconometríaDocumento22 páginasContenido Activador Unidad 3 Econometríaalmendra4943Aún no hay calificaciones
- IntroducciónDocumento13 páginasIntroducciónMelii BustiilloAún no hay calificaciones
- Econometría Capítulo 6Documento5 páginasEconometría Capítulo 6Marcelo PijalAún no hay calificaciones
- Econometría de Económicas Ejercicios para El Tema 1Documento11 páginasEconometría de Económicas Ejercicios para El Tema 1SERGIO REQUENAAún no hay calificaciones
- YanelaDocumento38 páginasYanelaIrwin JuarezAún no hay calificaciones
- Econometría II Unidades IV y VDocumento8 páginasEconometría II Unidades IV y VEdwinLazoAún no hay calificaciones
- Análisis de RegresiónDocumento23 páginasAnálisis de RegresiónANGHELO STEFFANO PAREDES GUTIERREZAún no hay calificaciones
- Econometría 2do Bimenstre - Investigación 4Documento7 páginasEconometría 2do Bimenstre - Investigación 4Marcelo PijalAún no hay calificaciones
- Modelos de Regresión No LinealDocumento8 páginasModelos de Regresión No LinealLuis FlorenciaToalaAún no hay calificaciones
- GamDocumento12 páginasGamNoelia Valderrama BhraunxsAún no hay calificaciones
- 10 - Regresión y CorrelaciónDocumento8 páginas10 - Regresión y CorrelaciónMatias SilveraAún no hay calificaciones
- Transparencias Tema II: Modelo Básico de Regresión Lineal MúltipleDocumento50 páginasTransparencias Tema II: Modelo Básico de Regresión Lineal MúltipleEmilyAún no hay calificaciones
- Capitulo I - 1 Al 2Documento22 páginasCapitulo I - 1 Al 2Alejandro Benito PajueloAún no hay calificaciones
- Resumen Capitulo # 6-EconometriaDocumento3 páginasResumen Capitulo # 6-EconometriaPerdomo Joel100% (1)
- CAPÍTULO 13 y 10Documento4 páginasCAPÍTULO 13 y 10Luis Vera DiazAún no hay calificaciones
- Formas Funcionales de Los Modelos de Regresión Lineal SimpleDocumento6 páginasFormas Funcionales de Los Modelos de Regresión Lineal SimpleDouglas Pablo Mansilla RodriguezAún no hay calificaciones
- Función Seno - C. ParamétricasDocumento3 páginasFunción Seno - C. Paramétricasinoxia1Aún no hay calificaciones
- Guia de Ecuaciones Parametricas PDFDocumento12 páginasGuia de Ecuaciones Parametricas PDFAxelhans MartinezAún no hay calificaciones
- Estimación Del Modelo Por Mínimos Cuadrados Ordinarios y Sus PropiedadesDocumento25 páginasEstimación Del Modelo Por Mínimos Cuadrados Ordinarios y Sus PropiedadesKevo Pérez GarcíaAún no hay calificaciones
- Trabajo Fisica 1 Lab 2Documento37 páginasTrabajo Fisica 1 Lab 2Alexander KuroSake GuevaraAún no hay calificaciones
- Resumen Capítulo 6 GujaratiDocumento8 páginasResumen Capítulo 6 GujaratiRenePerezVazquez40% (5)
- 3 Regresion Lineal Multiple Estimacion yDocumento38 páginas3 Regresion Lineal Multiple Estimacion ymoon gouiAún no hay calificaciones
- Grafos y Digrafos PDFDocumento56 páginasGrafos y Digrafos PDFZy CamAún no hay calificaciones
- El Modelo de Regresion Lineal Multiple Con StataDocumento14 páginasEl Modelo de Regresion Lineal Multiple Con StataSergio Luis OlivoAún no hay calificaciones
- Curso de Finanzas 2Documento15 páginasCurso de Finanzas 2Jaiver AriasAún no hay calificaciones
- Unidad I Analisis DimensionalDocumento9 páginasUnidad I Analisis DimensionalEloisa InfiniteAún no hay calificaciones
- Ecuación ParamétricaDocumento24 páginasEcuación ParamétricaMagda De LeonAún no hay calificaciones
- Informe de GraficasDocumento11 páginasInforme de GraficasJuan CarlosAún no hay calificaciones
- CAPITULO 2 2da EdDocumento38 páginasCAPITULO 2 2da EdRobert GRAún no hay calificaciones
- Tarea Semana 11 - Grupo 3 - Analisis de Regresión IiDocumento28 páginasTarea Semana 11 - Grupo 3 - Analisis de Regresión IiVerónica Garcia RosasAún no hay calificaciones
- Tarea Naty 08 DicDocumento8 páginasTarea Naty 08 DicSherlyn Fern�ndez CornizAún no hay calificaciones
- Ecuación ParamétricaDocumento16 páginasEcuación ParamétricagastromonoAún no hay calificaciones
- Practica 1 de Laboratorio de Fisica IIDocumento9 páginasPractica 1 de Laboratorio de Fisica IIAlberto MendezAún no hay calificaciones
- Cap 3Documento13 páginasCap 3Yurema Choque HuancaAún no hay calificaciones
- Minimos Cuadrados - Informe No. 1Documento3 páginasMinimos Cuadrados - Informe No. 1MarllyAún no hay calificaciones
- Tecnicas Multivariantes Parte1 Twiggy Guerrero PDFDocumento12 páginasTecnicas Multivariantes Parte1 Twiggy Guerrero PDFDomenico ZuzoloAún no hay calificaciones
- Ecuaciones Paramétricas, Coordenadas Polares y Aplicaciones de La Integral en La Ingeniería MecánicaDocumento35 páginasEcuaciones Paramétricas, Coordenadas Polares y Aplicaciones de La Integral en La Ingeniería Mecánicacocoloco 2003Aún no hay calificaciones
- Practica#2Documento20 páginasPractica#2Dario RiveraAún no hay calificaciones
- INFORME GRAFICOS Y ECUACIONES c4Documento24 páginasINFORME GRAFICOS Y ECUACIONES c4NICOLÉ JHULIANA HERBAS GUZMÁNAún no hay calificaciones
- Tecnicas de Regresion No LinealDocumento53 páginasTecnicas de Regresion No Linealpedro antonioAún no hay calificaciones
- Ecuación Paramétrica - Wikipedia, La Enciclopedia LibreDocumento12 páginasEcuación Paramétrica - Wikipedia, La Enciclopedia LibreLuis SimonAún no hay calificaciones
- Capítulo Vii - Integrales de Línea Definitivo 2020Documento23 páginasCapítulo Vii - Integrales de Línea Definitivo 2020RenzoCoiriniAún no hay calificaciones
- Laboratorio #2 Ajuste de CurvasDocumento19 páginasLaboratorio #2 Ajuste de CurvasDigno0% (1)
- Informe de Laboratorio de Fisica N2jhfvuhfjhbDocumento7 páginasInforme de Laboratorio de Fisica N2jhfvuhfjhbgrupo3fieeunmsmAún no hay calificaciones
- Recopilación MatemáticaDocumento10 páginasRecopilación MatemáticakamigashyAún no hay calificaciones
- GGGGGGGGGGGDocumento4 páginasGGGGGGGGGGGJns GasparAún no hay calificaciones
- Guajarati4 p.195-224Documento31 páginasGuajarati4 p.195-224Copykat ImpresosAún no hay calificaciones
- Funciones Exponenciales y LogaritmicasDocumento43 páginasFunciones Exponenciales y LogaritmicasPetan TrabajoAún no hay calificaciones
- G - #1Documento3 páginasG - #1kilkilAún no hay calificaciones
- Entregable 1 CalculoDocumento11 páginasEntregable 1 Calculonestor hugo flores jacoboAún no hay calificaciones
- Estimación de Modelos UniecuacionalesDocumento13 páginasEstimación de Modelos UniecuacionalesLisset Soraya Huamán QuispeAún no hay calificaciones
- Modelos de Ecuaciones SimultáneasDocumento40 páginasModelos de Ecuaciones SimultáneasJazmin PinedAún no hay calificaciones
- Reforma Ordenanza Administracion y Control Territorio CayambeDocumento49 páginasReforma Ordenanza Administracion y Control Territorio CayambeDai QuAún no hay calificaciones
- Reglamento Final Aprobado JGSRP1Documento16 páginasReglamento Final Aprobado JGSRP1Dai QuAún no hay calificaciones
- D-28837 Sistema Contra Incendios JyjDocumento102 páginasD-28837 Sistema Contra Incendios JyjDai QuAún no hay calificaciones
- TC Tema 2Documento1128 páginasTC Tema 2Dai QuAún no hay calificaciones
- Formulario de Renovacion de PatenteDocumento1 páginaFormulario de Renovacion de PatenteDai QuAún no hay calificaciones
- Canchas: Instalación Césped SintéticoDocumento1 páginaCanchas: Instalación Césped SintéticoDai QuAún no hay calificaciones
- EstatutoJGSRP2017APROB 3Documento40 páginasEstatutoJGSRP2017APROB 3Dai QuAún no hay calificaciones
- Formulario Impuesto 1coma5 Por MilDocumento1 páginaFormulario Impuesto 1coma5 Por MilDai QuAún no hay calificaciones
- Requisitos Renovacion de PatenteDocumento2 páginasRequisitos Renovacion de PatenteDai QuAún no hay calificaciones
- Plan de Accin de La Junta General 2019Documento33 páginasPlan de Accin de La Junta General 2019Dai QuAún no hay calificaciones
- Presidente Parroquial Dr. Mauricio Mendoza Zambrano: Gad Parroquial Rural Patricia PilarDocumento1 páginaPresidente Parroquial Dr. Mauricio Mendoza Zambrano: Gad Parroquial Rural Patricia PilarDai QuAún no hay calificaciones
- Presidente Parroquial Dr. Mauricio Mendoza Zambrano: Gad Parroquial Rural Patricia PilarDocumento1 páginaPresidente Parroquial Dr. Mauricio Mendoza Zambrano: Gad Parroquial Rural Patricia PilarDai QuAún no hay calificaciones
- FT Fibertex F20G PDFDocumento1 páginaFT Fibertex F20G PDFDai QuAún no hay calificaciones
- FT Drainpipe GeneralDocumento1 páginaFT Drainpipe GeneralDai QuAún no hay calificaciones
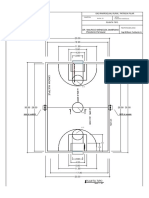
- Gad Parroquial Rural Patricia Pilar: Vista Lateral Arco MultipleDocumento1 páginaGad Parroquial Rural Patricia Pilar: Vista Lateral Arco MultipleDai QuAún no hay calificaciones
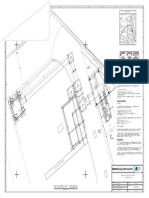
- Empresa Eléctrica Quito: UbicaciónDocumento1 páginaEmpresa Eléctrica Quito: UbicaciónDai QuAún no hay calificaciones
- Taller Sobre Distribución de Probabilidad Normal .Documento8 páginasTaller Sobre Distribución de Probabilidad Normal .Nimia RuizAún no hay calificaciones
- Actividad 6Documento3 páginasActividad 6Cesar Garcia HernandezAún no hay calificaciones
- Cuadro Comparativo de Pruebas Paramétricas y No ParamétricasDocumento2 páginasCuadro Comparativo de Pruebas Paramétricas y No ParamétricasLola Bautista67% (3)
- Tema 16Documento86 páginasTema 16jhamilAún no hay calificaciones
- 1.5.1. Medidas de Dispersión-3Documento5 páginas1.5.1. Medidas de Dispersión-3rox canAún no hay calificaciones
- Taller Regresion Lineal Estadística IIDocumento6 páginasTaller Regresion Lineal Estadística IICamilo Esteban Bernal MontesAún no hay calificaciones
- Diametros CaracteristicosDocumento18 páginasDiametros CaracteristicosMedardo VillicañaAún no hay calificaciones
- Actividad 2 - Variable Cuantitativa Discreta y ContinuaDocumento11 páginasActividad 2 - Variable Cuantitativa Discreta y ContinuadayaAún no hay calificaciones
- Cap 2 Estadística para El MantenimientoDocumento39 páginasCap 2 Estadística para El MantenimientocromerobarrenoAún no hay calificaciones
- Apuntes Con DefinicionesDocumento49 páginasApuntes Con DefinicionesSera LopezAún no hay calificaciones
- SPSS 1Documento5 páginasSPSS 1Maria FernandezAún no hay calificaciones
- Formulas de EconometricaDocumento27 páginasFormulas de EconometricaMelisa Bremeli Valdez TorrezAún no hay calificaciones
- Cap 8 Intervalo de ConfianzaDocumento14 páginasCap 8 Intervalo de Confianzacarlos laraAún no hay calificaciones
- Ultima Evaluacion EstadisticaDocumento2 páginasUltima Evaluacion EstadisticaSamuel ContrerasAún no hay calificaciones
- Ejercicio Resuleto de Practica CalificadaDocumento24 páginasEjercicio Resuleto de Practica CalificadaAdriansito RtAún no hay calificaciones
- Tema 5 REGLAS de DecisionDocumento6 páginasTema 5 REGLAS de DecisionDeyci Villa ValleAún no hay calificaciones
- Econometría Aplicada A Finanzas: Prof. Elder Javier Nunes P., MSC., CRMDocumento149 páginasEconometría Aplicada A Finanzas: Prof. Elder Javier Nunes P., MSC., CRMVictor Valdivia MorenoAún no hay calificaciones
- Tema4 RegresionDocumento23 páginasTema4 RegresionJose Manuel Masanet GarcíaAún no hay calificaciones
- Cuadernillo 2018 - 2 ParteDocumento10 páginasCuadernillo 2018 - 2 ParteMatias RodriguezAún no hay calificaciones
- VC - Est Parametr y Tamal de MuestraDocumento36 páginasVC - Est Parametr y Tamal de MuestraVamos Tu PuedesAún no hay calificaciones
- EjerciciosDocumento76 páginasEjerciciosDeyvi VillanuevaAún no hay calificaciones
- Ejercicio 3 Anava y Tukey - DbcaDocumento4 páginasEjercicio 3 Anava y Tukey - DbcaViviana FalcónAún no hay calificaciones
- Clase Vivo1 AEC AnotacionesDocumento59 páginasClase Vivo1 AEC AnotacionesTomas Barrientos BrunaAún no hay calificaciones
- Estadistica 2 - Segundo ParcialDocumento15 páginasEstadistica 2 - Segundo ParcialJulian NalivaikoAún no hay calificaciones
- Taller #3Documento4 páginasTaller #3sandoval93elenaAún no hay calificaciones