También podría gustarte
- Respuesta Al Impulso y ConvolucionDocumento19 páginasRespuesta Al Impulso y ConvolucionCarlos Zepita100% (2)
- Practica Intro A MatlabDocumento14 páginasPractica Intro A Matlabluis barreraAún no hay calificaciones
- Práctica 8 Teorema de MuestreoDocumento10 páginasPráctica 8 Teorema de MuestreoAlex RaZerh100% (3)
- Serie de Fourier - Calculo Simbólico OctaveDocumento9 páginasSerie de Fourier - Calculo Simbólico OctavelchirinoscautinhoAún no hay calificaciones
- Control OctaveDocumento9 páginasControl OctaveJaime Adolfo Mejia LeónAún no hay calificaciones
- Ejercicio TermopilaDocumento2 páginasEjercicio TermopilaIsmael MinchalaAún no hay calificaciones
- Ejemplos Formula Integral de CauchyDocumento21 páginasEjemplos Formula Integral de Cauchycallofduty ghostAún no hay calificaciones
- Transformada de FOURIERDocumento34 páginasTransformada de FOURIEROriel Mojica100% (1)
- Calculo 4 Serie de FourierDocumento16 páginasCalculo 4 Serie de FourierJonathan Saavedra HerreraAún no hay calificaciones
- Ejercicio P3Documento2 páginasEjercicio P3Alexis Ramita Robles NavarroAún no hay calificaciones
- 2758 - Grupo 3 - Taller 3Documento19 páginas2758 - Grupo 3 - Taller 3Kevin CaicedoAún no hay calificaciones
- Guía de Ejercicios Prueba N°2Documento1 páginaGuía de Ejercicios Prueba N°2Esbany Lanchipa SanchezAún no hay calificaciones
- Práctica Nro 2Documento47 páginasPráctica Nro 2Mndjn VttrnAún no hay calificaciones
- EXPERIENCIA7PALOMINOSYSLABDocumento6 páginasEXPERIENCIA7PALOMINOSYSLABJohn PalominoAún no hay calificaciones
- Desarrollo de Ejercicios de Diseño de Observadores PDFDocumento13 páginasDesarrollo de Ejercicios de Diseño de Observadores PDFRenzo LevanoAún no hay calificaciones
- Sistemas de Control 2 Labo1-4Documento7 páginasSistemas de Control 2 Labo1-4Iván Fernando Mayorga Hilario100% (2)
- CLASE # 3 Coeficientes de Fourier y Simetrías de OndaDocumento9 páginasCLASE # 3 Coeficientes de Fourier y Simetrías de Ondamartha guzman100% (7)
- ALU Expandida Con VHDLDocumento14 páginasALU Expandida Con VHDLArmando GaviriaAún no hay calificaciones
- FileDocumento53 páginasFileJose Adonay JàcomeAún no hay calificaciones
- Implementación y Uso de Algoritmo Recursivo de Mínimos Cuadrados en Circuito RCDocumento3 páginasImplementación y Uso de Algoritmo Recursivo de Mínimos Cuadrados en Circuito RCLuis D. Barrera Gamboa100% (1)
- Keypad PythonDocumento3 páginasKeypad PythonJuan David SolarteAún no hay calificaciones
- Ejercicio Convolucion Continua - Señales y SistemasDocumento4 páginasEjercicio Convolucion Continua - Señales y SistemasMartinSuarezAún no hay calificaciones
- Transformada ZDocumento18 páginasTransformada ZJesus Garcia GarciaAún no hay calificaciones
- Análisis de Transformación de Sistemas LTI: Capitulo 2 Capítulo 3Documento91 páginasAnálisis de Transformación de Sistemas LTI: Capitulo 2 Capítulo 3yamil mamaniAún no hay calificaciones
- Simulacion Del Amplificador de InstrumentacionDocumento6 páginasSimulacion Del Amplificador de InstrumentacionClaudia GallegoAún no hay calificaciones
- Informe Previo 4 MalcaDocumento5 páginasInforme Previo 4 MalcaLuisfelipe Zavaleta GuevaraAún no hay calificaciones
- Informe Labo 2 ETN 1024Documento15 páginasInforme Labo 2 ETN 1024robertoAún no hay calificaciones
- Trabajo Señales y SistemasDocumento4 páginasTrabajo Señales y Sistemascaromero270Aún no hay calificaciones
- Proyecto Matlab TelecomunicacionesDocumento6 páginasProyecto Matlab TelecomunicacionesAdhemar MarceloAún no hay calificaciones
- E2550-1P209 ResueltoDocumento8 páginasE2550-1P209 ResueltoFabricio FloresAún no hay calificaciones
- Transformada CosenoDocumento3 páginasTransformada CosenoAnderson VásquezAún no hay calificaciones
- Controldigital-Libro de TextoDocumento21 páginasControldigital-Libro de TextoNate River0% (1)
- Practica #3Documento14 páginasPractica #3Jordan Moreira ValdezAún no hay calificaciones
- Capitulo 8Documento71 páginasCapitulo 8aerubio76Aún no hay calificaciones
- Guia Laboratorio PDS UTPDocumento74 páginasGuia Laboratorio PDS UTPRomero GrpAún no hay calificaciones
- Capitulo 1. Señales y SistemasDocumento36 páginasCapitulo 1. Señales y SistemasJuan DuarteAún no hay calificaciones
- Control PID Con Labview y TIA Portal PDFDocumento7 páginasControl PID Con Labview y TIA Portal PDFAndres DavidAún no hay calificaciones
- Ventana de Kaiser PDFDocumento28 páginasVentana de Kaiser PDFMARILINMAYSONAún no hay calificaciones
- Polinomio de TaylorDocumento5 páginasPolinomio de TaylorDiego Ramos LamaAún no hay calificaciones
- Lab - 2 Sistemas de Control DigitalDocumento25 páginasLab - 2 Sistemas de Control DigitalNiltonRamírezAún no hay calificaciones
- Péndulo Invertido en Espacio de EstadosDocumento14 páginasPéndulo Invertido en Espacio de EstadosTom Sawyer Mark0% (1)
- Lab 04 Transformada Z InversaDocumento19 páginasLab 04 Transformada Z InversaLuis RondoAún no hay calificaciones
- Diseno de Un Ecualizador de Cuatro BandasDocumento142 páginasDiseno de Un Ecualizador de Cuatro Bandasjuan pablo rojas ruizAún no hay calificaciones
- Informe Final 4 MalcaDocumento8 páginasInforme Final 4 MalcaJohn CastroAún no hay calificaciones
- Practica 1 Comunicaciones DigitalesDocumento9 páginasPractica 1 Comunicaciones Digitalesaxel_rosalesgAún no hay calificaciones
- Interpretación de Polos y Ceros de Una Función de TransferenciaDocumento16 páginasInterpretación de Polos y Ceros de Una Función de TransferenciaEduardo PastorAún no hay calificaciones
- Laboratorio #04 Sist 2do OrdenDocumento7 páginasLaboratorio #04 Sist 2do OrdenJosue Israel MendozaAún no hay calificaciones
- Ejercicios KarnaughtDocumento8 páginasEjercicios KarnaughtMetzy wordsAún no hay calificaciones
- Polinomios Normalizados Butterworth y ChebyshevDocumento2 páginasPolinomios Normalizados Butterworth y Chebyshevnapoleon_velasc3617Aún no hay calificaciones
- Avance Electronicos IIDocumento9 páginasAvance Electronicos IIGianmarcoAcevedoAún no hay calificaciones
- Apunte Filtros DigitalesDocumento66 páginasApunte Filtros Digitalesjekavelepe100% (1)
- Control Digital - Fase4 - UnadDocumento6 páginasControl Digital - Fase4 - UnadGustavo MedranoAún no hay calificaciones
- Comunicacion Serial SincronaDocumento24 páginasComunicacion Serial Sincronaandres8179Aún no hay calificaciones
- Ejercicios Transformada ZDocumento1 páginaEjercicios Transformada ZRobertoPáezSalgadoAún no hay calificaciones
- Introducción Al Análisis de Señales y Sistemas DiscretosDocumento8 páginasIntroducción Al Análisis de Señales y Sistemas DiscretosKevinMarcilloAún no hay calificaciones
- Sistemas y Señales Discretas en El Tiempo MATLABDocumento7 páginasSistemas y Señales Discretas en El Tiempo MATLABJunior Mauricio LojaAún no hay calificaciones
- Problemas1gdl ClaseDocumento8 páginasProblemas1gdl ClaseCarlos GarcíaAún no hay calificaciones
- Practica 0Documento11 páginasPractica 0Rodrigo MuñozAún no hay calificaciones
- Manual de Uso E Instalación Manual de Uso E InstalaciónDocumento32 páginasManual de Uso E Instalación Manual de Uso E InstalaciónRainer MondejarAún no hay calificaciones
- Fallo Al Poner D y ReproDocumento3 páginasFallo Al Poner D y ReproMario MastronardiAún no hay calificaciones
- Aip Sup C37 A25 2019 SKLTDocumento7 páginasAip Sup C37 A25 2019 SKLTAndres SegoviaAún no hay calificaciones
- Acoplamiento Magnetico de Bobinas Y Medida de Aislamiento en Los Transformadores en Los Trasformadores I.-ObjetivoDocumento4 páginasAcoplamiento Magnetico de Bobinas Y Medida de Aislamiento en Los Transformadores en Los Trasformadores I.-ObjetivoMelany Aragón ApazaAún no hay calificaciones
- Taller Electronica 3Documento10 páginasTaller Electronica 3Dandy ChavezAún no hay calificaciones
- Equipo de Diagnóstico - XPLORE-NEXIQ - HelPCDocumento7 páginasEquipo de Diagnóstico - XPLORE-NEXIQ - HelPCJMWIN32Aún no hay calificaciones
- Informe-Proyecto PatrimonioDocumento17 páginasInforme-Proyecto PatrimonioGuillermo Evelio Conibo MateoAún no hay calificaciones
- Exposición 3.2.1, 3.3 y 3.3.1Documento30 páginasExposición 3.2.1, 3.3 y 3.3.1Nadia Cruz SantiagoAún no hay calificaciones
- Torre de Antena ParabolicaDocumento8 páginasTorre de Antena ParabolicaLylian HidalgoAún no hay calificaciones
- GLC LH SMDDocumento3 páginasGLC LH SMDCartas Alvarado Manuel JoseAún no hay calificaciones
- Tarea 3 Ipd413Documento10 páginasTarea 3 Ipd413RicardoHernándezVidalAún no hay calificaciones
- Lan-Wan-Circuito ElectricoDocumento6 páginasLan-Wan-Circuito ElectricoEnrique Angel Gómez LopeAún no hay calificaciones
- Talleres Electronica Analoga BasciaDocumento7 páginasTalleres Electronica Analoga BasciaVICTOR JULIO ROSAS PARRAAún no hay calificaciones
- RectificacionDocumento1 páginaRectificacionjesusAún no hay calificaciones
- EYM - Práctica 2Documento12 páginasEYM - Práctica 2Carlos SantanaAún no hay calificaciones
- 02 Procesos y Normas Tecnicas de Instalaciones 3PLAYDocumento90 páginas02 Procesos y Normas Tecnicas de Instalaciones 3PLAYJulio SalinasAún no hay calificaciones
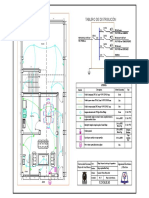
- Plano de Distribución - 1 NivelDocumento1 páginaPlano de Distribución - 1 NivelMax Fredi Quispe AguilarAún no hay calificaciones
- Antena 93 4 BaysDocumento4 páginasAntena 93 4 BaysIsmael ArráezAún no hay calificaciones
- Cuaderno de Informe Semana 3Documento9 páginasCuaderno de Informe Semana 3ronald roqueAún no hay calificaciones
- MA-DI-08-002-009 Manual Mto Sala de Servidores Adm Por STR V3 (05-05 V2)Documento34 páginasMA-DI-08-002-009 Manual Mto Sala de Servidores Adm Por STR V3 (05-05 V2)Daniel Eduardo Garcia MarinAún no hay calificaciones
- Unidad 1 Temas ExposiciónDocumento9 páginasUnidad 1 Temas ExposiciónCristo CisnerosAún no hay calificaciones
- Informe de Laboratorio 2 RECTIFICADORESDocumento4 páginasInforme de Laboratorio 2 RECTIFICADORESSamuel White Rospigliozzi100% (1)
- Manual Punto A Punto-UbiquitiDocumento9 páginasManual Punto A Punto-UbiquitiEsteban José García ZamoraAún no hay calificaciones
- Antena Vertical de Alto Rendimiento y Tamaño Completo para 40m - 7 MHZDocumento1 páginaAntena Vertical de Alto Rendimiento y Tamaño Completo para 40m - 7 MHZezequielAún no hay calificaciones
- Trabajo 2Documento4 páginasTrabajo 2FredRb SkaAún no hay calificaciones
- Preguntero Sistemas Informáticos 1Documento14 páginasPreguntero Sistemas Informáticos 1Nidia Beatriz SperaAún no hay calificaciones
- InfoPLC Net 1 Intro AutomatasDocumento34 páginasInfoPLC Net 1 Intro AutomatasKarlitos Garamendi MartinezAún no hay calificaciones
- F Miyara - Acústica y Sistemas de Sonido - Cap 15, 23, 24 y 25 PDFDocumento90 páginasF Miyara - Acústica y Sistemas de Sonido - Cap 15, 23, 24 y 25 PDFMarioDiaz100% (1)
- Proyecto 1.5.decodificador BCDDocumento11 páginasProyecto 1.5.decodificador BCDFelix ZantosAún no hay calificaciones
- Lista ComplusDocumento22 páginasLista ComplusFabián MedinaAún no hay calificaciones