También podría gustarte
- Sistema 4 BarrasDocumento7 páginasSistema 4 BarrasManuelAún no hay calificaciones
- Sistema de 4 Barras (1) de AlexanderDocumento10 páginasSistema de 4 Barras (1) de AlexanderDimar Joel Romero AtalayaAún no hay calificaciones
- Mecanismo de 4 Barras y 1 BalancinDocumento10 páginasMecanismo de 4 Barras y 1 BalancinJerry Carril ChavezAún no hay calificaciones
- Modelo Hiperbolico - Jose CampañaDocumento11 páginasModelo Hiperbolico - Jose CampañaPedro Troncoso AcuñaAún no hay calificaciones
- Solucion Leccion 7Documento15 páginasSolucion Leccion 7DanielAún no hay calificaciones
- Practica de Graficos y Ajustes de Curva Sabato Apaza Herlan CarlosDocumento6 páginasPractica de Graficos y Ajustes de Curva Sabato Apaza Herlan CarlosJuanito AlcachofaAún no hay calificaciones
- Graficas ErickDocumento5 páginasGraficas Erickassadsaasds asdsadsaAún no hay calificaciones
- LAB3curvas de Voltaje-IntensidadDocumento8 páginasLAB3curvas de Voltaje-Intensidadcefiqt100% (1)
- Reporte #6Documento5 páginasReporte #6Daniela AndreAún no hay calificaciones
- Tarea 10Documento7 páginasTarea 10david ramosAún no hay calificaciones
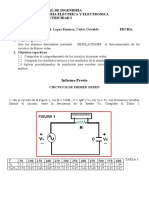
- Informe Previo L4-1Documento9 páginasInforme Previo L4-1Carlos Lopez RamirezAún no hay calificaciones
- Laboratorio de Estaticas 1Documento3 páginasLaboratorio de Estaticas 1Pathy Gutierrez MoralesAún no hay calificaciones
- Problemas de Lineas de TransmisiónDocumento39 páginasProblemas de Lineas de TransmisiónIvan CA100% (1)
- Elementos Lineales y No Lineales - GRUPO 1. L.ALVAREZDocumento10 páginasElementos Lineales y No Lineales - GRUPO 1. L.ALVAREZAlexander CittadinoAún no hay calificaciones
- Puente de Wheatstone para Una RTD y PTCDocumento11 páginasPuente de Wheatstone para Una RTD y PTCMauricio RodriguezAún no hay calificaciones
- Analisis Lab 6Documento3 páginasAnalisis Lab 6Fabian MaloAún no hay calificaciones
- Química Física III. Ejercicios Básicos Temas V y VI. Curso 2015-2016Documento13 páginasQuímica Física III. Ejercicios Básicos Temas V y VI. Curso 2015-2016Fredognes PastorAún no hay calificaciones
- GraficosDocumento2 páginasGraficosMerc JavierAún no hay calificaciones
- LEVASAPLICACIONESDocumento26 páginasLEVASAPLICACIONESFernando OlmedoAún no hay calificaciones
- Laboratorio N°3 Maquinas ElectricasDocumento8 páginasLaboratorio N°3 Maquinas Electricasterran313Aún no hay calificaciones
- APE. Laura Guadalupe García ZentenoDocumento2 páginasAPE. Laura Guadalupe García ZentenoLuna GarcíaAún no hay calificaciones
- Elt 2690 Lab4 Solución Sem 1 2022Documento3 páginasElt 2690 Lab4 Solución Sem 1 2022EQUISE AILLON ALDRIN ABNERAún no hay calificaciones
- Cuestionario PrevioDocumento3 páginasCuestionario Previoemily colin olivaresAún no hay calificaciones
- Triangulo de PotierDocumento6 páginasTriangulo de PotierLuis miguelAún no hay calificaciones
- Cuestionario 03Documento9 páginasCuestionario 03Carlos Antonio Mejía CaicedoAún no hay calificaciones
- Problemas Propiedades MecánicasDocumento9 páginasProblemas Propiedades MecánicasreformasmramirezAún no hay calificaciones
- Fuerzas DinamicasDocumento2 páginasFuerzas Dinamicaskleberson_2011Aún no hay calificaciones
- Prac. Domingo 04Documento13 páginasPrac. Domingo 04alexttitosantacruzAún no hay calificaciones
- Practica 2 FPEDocumento7 páginasPractica 2 FPEJuanQueteImportaAún no hay calificaciones
- CSyPE 5AV1 P3Documento10 páginasCSyPE 5AV1 P3Alex EmilianoAún no hay calificaciones
- Tabla Inductancia 2Documento3 páginasTabla Inductancia 2Gustavo EspinozaAún no hay calificaciones
- Practica 15 Bobina ExploradoraDocumento5 páginasPractica 15 Bobina ExploradoraVictor Hair Santacruz MuñozAún no hay calificaciones
- Primera Practica CalificadaDocumento6 páginasPrimera Practica CalificadaErick Brandon Carita CuarezAún no hay calificaciones
- Guía 202Documento8 páginasGuía 202Oscar AlvaradoAún no hay calificaciones
- Cordinacion de Protecciones AngelaDocumento38 páginasCordinacion de Protecciones AngelaB Molano C CrhistianAún no hay calificaciones
- Velocidad de CorrosiónDocumento6 páginasVelocidad de CorrosióndennisAún no hay calificaciones
- Problemas de Fermentacion EnzimaticaDocumento21 páginasProblemas de Fermentacion EnzimaticaCamila Sanabria Galvez100% (1)
- Bobina ExploradoraDocumento3 páginasBobina ExploradoraLuis FelipeAún no hay calificaciones
- Informe 7Documento11 páginasInforme 7Ricardo ReyesAún no hay calificaciones
- TAREA 4 Informe Interacción Suelo EstructuraDocumento6 páginasTAREA 4 Informe Interacción Suelo Estructuramelissa sanchezAún no hay calificaciones
- Taller Lineas de Transmision Con Carta de SmithDocumento3 páginasTaller Lineas de Transmision Con Carta de SmithdanielAún no hay calificaciones
- Seminario 1Documento4 páginasSeminario 1alvarezjmAún no hay calificaciones
- Problemas Resueltos BiotecnologiaDocumento20 páginasProblemas Resueltos BiotecnologiaAstrid Munguia100% (3)
- Informe K-2Documento9 páginasInforme K-2Anibal ArcAún no hay calificaciones
- Tablas - Lab 6Documento8 páginasTablas - Lab 6angie mimbelaAún no hay calificaciones
- Velocidad de CorrosiónDocumento6 páginasVelocidad de CorrosiónJorge LunaAún no hay calificaciones
- Aplicación de La Ley de Inducción de FaradayDocumento7 páginasAplicación de La Ley de Inducción de FaradayVictor Hair Santacruz MuñozAún no hay calificaciones
- Informe LAB 3Documento19 páginasInforme LAB 3Brayan PalominoAún no hay calificaciones
- Cuestionario de Campo EléctricoDocumento5 páginasCuestionario de Campo EléctricoJimmy Cjuro ApazaAún no hay calificaciones
- Lab 6 MecanismosDocumento10 páginasLab 6 MecanismosRaelee IsabelAún no hay calificaciones
- Problema Resuelto - Guzman VasquezDocumento6 páginasProblema Resuelto - Guzman VasquezRosario Francesca Guzman VasquezAún no hay calificaciones
- Imforme II Laboratorio de Fisica 2 (LEY DE OHM)Documento5 páginasImforme II Laboratorio de Fisica 2 (LEY DE OHM)danielAún no hay calificaciones
- Velocidad de CorrosiónDocumento6 páginasVelocidad de CorrosiónCarlos Chura NoriegaAún no hay calificaciones
- Velocidad de CorrosiónDocumento6 páginasVelocidad de CorrosiónYohan Chavez RamirezAún no hay calificaciones
- Velocidad de CorrosiónDocumento6 páginasVelocidad de CorrosiónkarinaAún no hay calificaciones
- Fraccionamiento Mod Hasta Pag 32Documento43 páginasFraccionamiento Mod Hasta Pag 32percyAún no hay calificaciones
- Resostatos QuimicosDocumento12 páginasResostatos QuimicosregadearAún no hay calificaciones
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Impacto Ambiental en Las CurtiembresDocumento4 páginasImpacto Ambiental en Las CurtiembresAnonymous DlUXgWUnrAún no hay calificaciones
- Historia Del JabónDocumento6 páginasHistoria Del JabónAnonymous DlUXgWUnrAún no hay calificaciones
- Elaboración de JabónDocumento9 páginasElaboración de JabónAnonymous DlUXgWUnrAún no hay calificaciones
- Almidón de AvenaDocumento14 páginasAlmidón de AvenaAnonymous DlUXgWUnr100% (2)
- Aplicaciones de La ExtrusiónDocumento2 páginasAplicaciones de La ExtrusiónAnonymous DlUXgWUnrAún no hay calificaciones
- IDEPUNP GeometriaDocumento40 páginasIDEPUNP GeometriaARMANDO CHAPAAún no hay calificaciones
- T5 PSCMTR - La Fiabilidad en Los Test Referidos Al CriterioDocumento10 páginasT5 PSCMTR - La Fiabilidad en Los Test Referidos Al CriterioGustavo Afonso RodríguezAún no hay calificaciones
- Radicales, Sus Propiedades y Sus Operaciones - SuperprofDocumento33 páginasRadicales, Sus Propiedades y Sus Operaciones - SuperprofangelAún no hay calificaciones
- Actividades FreecadDocumento6 páginasActividades FreecadSergioAún no hay calificaciones
- Categoria Del Terreno Segun Su Rigurosidad y La Clase de EstructuraDocumento3 páginasCategoria Del Terreno Segun Su Rigurosidad y La Clase de EstructuraLuis Angel GarzaAún no hay calificaciones
- Teoria de Productos NotablesDocumento1 páginaTeoria de Productos NotablesGean Del Piero P. Lozada100% (1)
- Ficha de Trabajo 2 - Matemática - Números Enteros - 1ero de Secundaria - 2024Documento5 páginasFicha de Trabajo 2 - Matemática - Números Enteros - 1ero de Secundaria - 2024a03259Aún no hay calificaciones
- Actividad 1 1p 2qDocumento2 páginasActividad 1 1p 2qjjiménez_339513Aún no hay calificaciones
- Equivalente en Agua de Un Calor - MetroDocumento4 páginasEquivalente en Agua de Un Calor - Metrokevin reyna lojaAún no hay calificaciones
- Informe Efecto Hall PDFDocumento6 páginasInforme Efecto Hall PDFcdavidqgAún no hay calificaciones
- Control VectorialDocumento39 páginasControl VectorialELCTRICAL100% (1)
- Replanteo de Una Curva Por El Metodo de SarrazinDocumento10 páginasReplanteo de Una Curva Por El Metodo de SarrazinJersonFranklinArceFarfanAún no hay calificaciones
- Trabajo Matemática Financiera-DescuentoDocumento8 páginasTrabajo Matemática Financiera-Descuentoviktor krdonaAún no hay calificaciones
- 3 Geom V-UNI-2021 T1Documento44 páginas3 Geom V-UNI-2021 T1Fua compuatdora13Aún no hay calificaciones
- Modelo de Apt - FinanzasDocumento6 páginasModelo de Apt - FinanzasNIKOLLEAún no hay calificaciones
- División de PolinomiosDocumento14 páginasDivisión de PolinomiosJon TorresAún no hay calificaciones
- Taller NMDocumento12 páginasTaller NMvictorAún no hay calificaciones
- Guia 2 Geo 6Documento4 páginasGuia 2 Geo 6jean castillaAún no hay calificaciones
- 1ra Practica EDS 2021 1Documento3 páginas1ra Practica EDS 2021 1Alonso AtalayaAún no hay calificaciones
- Computacion Cuantica.Documento23 páginasComputacion Cuantica.Thaiis Herrera100% (1)
- Analisis Multinivel SPSSDocumento14 páginasAnalisis Multinivel SPSSJoel Patiño100% (1)
- Trabajo Matematicas PDF SEPTIEMBRE 8Documento11 páginasTrabajo Matematicas PDF SEPTIEMBRE 8AnDros JuRadoAún no hay calificaciones
- Ensayo de VigasDocumento36 páginasEnsayo de VigasHarlit Mamani TitoAún no hay calificaciones
- Propiedades Termicas de Rocas Y FluidosDocumento14 páginasPropiedades Termicas de Rocas Y FluidosRosa RuizAún no hay calificaciones
- Balance General de Momento LinealDocumento13 páginasBalance General de Momento LinealPedro Antonio Laos Pereyra0% (1)
- Ejercicio 2 de Control BorrosoDocumento2 páginasEjercicio 2 de Control BorrosoSimone CantarellaAún no hay calificaciones
- Tema 1 EspDocumento47 páginasTema 1 EspbetzyAún no hay calificaciones
- Foro Tematico MatematicaDocumento3 páginasForo Tematico MatematicapabloAún no hay calificaciones
- Practico Lineas de Fluencia EMIDocumento7 páginasPractico Lineas de Fluencia EMILuis Rodrigo Aldunate0% (1)
- Medidas de Tendencia Central TrabajoDocumento6 páginasMedidas de Tendencia Central Trabajowilmer Nuñez de los reyesAún no hay calificaciones