También podría gustarte
- Curvas de TransiciónDocumento17 páginasCurvas de TransiciónMaycol LudeñaAún no hay calificaciones
- Curvas Espirales de TransiciónDocumento7 páginasCurvas Espirales de TransiciónAlexander LimonesAún no hay calificaciones
- Marco TeoricoDocumento8 páginasMarco TeoricoAndrea Arroyave SepúlvedaAún no hay calificaciones
- Curvas de TransiciónDocumento32 páginasCurvas de Transiciónengel martinezAún no hay calificaciones
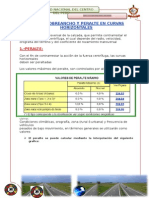
- Caminos PeralteDocumento17 páginasCaminos PeralteDeyvis Ubaldo YaurivilcaAún no hay calificaciones
- Vias Unidad 08 - Alineamiento Horizontal y Vertical - 2021Documento46 páginasVias Unidad 08 - Alineamiento Horizontal y Vertical - 2021gerardo dario PerezAún no hay calificaciones
- Sesión 7 - Diseño de Curva Horizontal de TransiciónDocumento29 páginasSesión 7 - Diseño de Curva Horizontal de TransiciónPatrick AlvaradoAún no hay calificaciones
- Peralte y Curvas de TransicionDocumento14 páginasPeralte y Curvas de TransicionGeorgina NazarethAún no hay calificaciones
- Presentacion Carreteras CurvasDocumento40 páginasPresentacion Carreteras CurvasDarlingAún no hay calificaciones
- Guia de Curvas de TransicionDocumento33 páginasGuia de Curvas de TransicionandreinaAún no hay calificaciones
- Curvas de transición espiral de EulerDocumento13 páginasCurvas de transición espiral de EulerJuan Carlos YucraAún no hay calificaciones
- Cálculo Mecanico DelcontuctorDocumento56 páginasCálculo Mecanico DelcontuctorNadia Barahona100% (1)
- Aplicación de La Curva Del ClotoideDocumento19 páginasAplicación de La Curva Del Clotoideluis mamani medinaAún no hay calificaciones
- cURVAS DE TRANSICIONDocumento29 páginascURVAS DE TRANSICIONEdward FranciscoAún no hay calificaciones
- Curvas Espirales de TransicionDocumento8 páginasCurvas Espirales de TransicionEddy Frank CoronadoAún no hay calificaciones
- Peraltes Curvas SimplesDocumento26 páginasPeraltes Curvas SimplesYECENIA CARDOZO ROMEROAún no hay calificaciones
- Introducción al diseño ferroviarioDocumento9 páginasIntroducción al diseño ferroviarioMartin Florez100% (1)
- Curvas de PeralteDocumento8 páginasCurvas de PeralteRicardo SerranoAún no hay calificaciones
- Sesión 7 - Diseño de Curva Horizontal de Transición - CHDocumento29 páginasSesión 7 - Diseño de Curva Horizontal de Transición - CHLuis Antonio Lozano RamirezAún no hay calificaciones
- Tema 7. - Trazado en AlzadoDocumento8 páginasTema 7. - Trazado en AlzadoConsuelo Tornero MartínezAún no hay calificaciones
- Calculadora de Desplazamiento VariableDocumento12 páginasCalculadora de Desplazamiento VariableHormedo RodriguezAún no hay calificaciones
- Diseño Del PeralteDocumento50 páginasDiseño Del PeralteOlga Gutiérrez SalasAún no hay calificaciones
- Diseño Gráfico de La CarreteraDocumento20 páginasDiseño Gráfico de La CarreterarosaAún no hay calificaciones
- Trabajo de Investigación: 1. PeralteDocumento6 páginasTrabajo de Investigación: 1. PeralteMarco OjedaAún no hay calificaciones
- Curvas de Transicion PDFDocumento7 páginasCurvas de Transicion PDFceciliaAún no hay calificaciones
- Longitud Mínima de Una Curva de TransiciónDocumento5 páginasLongitud Mínima de Una Curva de TransiciónShyd Ysa SolorzanoAún no hay calificaciones
- Curvas de Transicion. 2016Documento22 páginasCurvas de Transicion. 2016dsolorzano95Aún no hay calificaciones
- Peralte y Su TransiciónDocumento15 páginasPeralte y Su TransiciónFranciaElenaVargasAún no hay calificaciones
- Curso Introductorio de Vias Ferreas (Parte 4)Documento33 páginasCurso Introductorio de Vias Ferreas (Parte 4)Hans DuranAún no hay calificaciones
- Diseño de Sobreancho y PeralteDocumento12 páginasDiseño de Sobreancho y Peralteedisonxl4Aún no hay calificaciones
- Curvas de FerrocarrilesDocumento8 páginasCurvas de FerrocarrilesEmily JaimeAún no hay calificaciones
- Trabajo Curvas de Transición. Danneris VillegasDocumento13 páginasTrabajo Curvas de Transición. Danneris VillegasdannerisvAún no hay calificaciones
- Curvas de TransicionDocumento22 páginasCurvas de TransicionGiannina Marcos TasaycoAún no hay calificaciones
- CLOTOIDEDocumento5 páginasCLOTOIDE12francis12Aún no hay calificaciones
- Diseño de Curva Horizontal de TransiciónDocumento14 páginasDiseño de Curva Horizontal de TransiciónReneValverde100% (1)
- Calculo Vectorial Aplicada A La Ingenieria CivilDocumento9 páginasCalculo Vectorial Aplicada A La Ingenieria CivilMaríaAún no hay calificaciones
- Curvas TransicionDocumento22 páginasCurvas TransicionEnrique Alberto Torres CachoAún no hay calificaciones
- Manual de Carreteras - Diseño Geométrico (MTC) DG - 2018Documento46 páginasManual de Carreteras - Diseño Geométrico (MTC) DG - 2018jordan franciscoAún no hay calificaciones
- Carreteras 2 PeralteDocumento22 páginasCarreteras 2 PeralteMarlynMejiaAún no hay calificaciones
- Trabajo Viales II (Clotoide)Documento11 páginasTrabajo Viales II (Clotoide)RonaldContrerasAún no hay calificaciones
- Curvas HorizontalesDocumento10 páginasCurvas HorizontalesJose Cordova PerezAún no hay calificaciones
- Curvas de Transicion WordDocumento6 páginasCurvas de Transicion WordCoayla Mamani Junior AngelAún no hay calificaciones
- Curvas de TransicionDocumento27 páginasCurvas de TransicionJBCristopherAún no hay calificaciones
- Curvas de transición en carreteras: tipos, parámetros y ventajas de la espiral de EulerDocumento25 páginasCurvas de transición en carreteras: tipos, parámetros y ventajas de la espiral de EulerBrus HuaroteAún no hay calificaciones
- Curvas HorizontalesDocumento10 páginasCurvas HorizontalesNicolas Alvitres GrundyAún no hay calificaciones
- Curvas EspiralesDocumento36 páginasCurvas EspiralesAngel PrietoAún no hay calificaciones
- Trabajo de Carreteras - Parte Ana, Marco y NickDocumento34 páginasTrabajo de Carreteras - Parte Ana, Marco y NickYvan Walter Ruiz HornaAún no hay calificaciones
- Vias Tema 3 ClotoidesDocumento20 páginasVias Tema 3 ClotoidesLindsay GiraldoAún no hay calificaciones
- Perfil LongitudinalDocumento10 páginasPerfil LongitudinalFabio RomeroAún no hay calificaciones
- Serie-De-ejercicios Tangencial y NormalDocumento12 páginasSerie-De-ejercicios Tangencial y NormalOmar Asr AlejandroAún no hay calificaciones
- Clotoides Vias 2Documento33 páginasClotoides Vias 2andreinaAún no hay calificaciones
- Clase 8Documento26 páginasClase 8jorge esteban100% (2)
- Longitud de Transicion (Kevin)Documento18 páginasLongitud de Transicion (Kevin)Julio VelásquezAún no hay calificaciones
- Curvas Circulares CompuestasDocumento10 páginasCurvas Circulares CompuestasMario MdcaAún no hay calificaciones
- Homografía: Homografía: Transformaciones en Visión por ComputadorDe EverandHomografía: Homografía: Transformaciones en Visión por ComputadorAún no hay calificaciones
- Transformación de radón: Revelando patrones ocultos en datos visualesDe EverandTransformación de radón: Revelando patrones ocultos en datos visualesAún no hay calificaciones
- Principios de transferencia de cantidad de movimientoDe EverandPrincipios de transferencia de cantidad de movimientoAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Transformacion afin: Desbloqueo de perspectivas visuales: exploración de la transformación afín en visión por computadoraDe EverandTransformacion afin: Desbloqueo de perspectivas visuales: exploración de la transformación afín en visión por computadoraAún no hay calificaciones
- Tarea 8Documento3 páginasTarea 8Jose Angel Gastelum De Los ReyesAún no hay calificaciones
- AlbañileriaDocumento30 páginasAlbañileriajose bari regalado andoa100% (1)
- Condiciones de Las EstructurasDocumento4 páginasCondiciones de Las Estructuras꧁DULCE MARIA꧂ PINEDA ALANGUIAAún no hay calificaciones
- Silabo de AlbañileriaDocumento7 páginasSilabo de AlbañileriaCristhian Angel Vargas AlarconAún no hay calificaciones
- GavilanDocumento22 páginasGavilanDulc Ml CrossAún no hay calificaciones
- Análisis de estructuras mediante métodos matricialesDocumento5 páginasAnálisis de estructuras mediante métodos matricialesJonathan AnonimoAún no hay calificaciones
- 8 Cimentaciones Profundas - Jorge AlvaDocumento81 páginas8 Cimentaciones Profundas - Jorge AlvaGerald Ronald Gamonal SiapoAún no hay calificaciones
- 20 Intro - KC - 1GLD - V. Libres - P ArmónicaDocumento40 páginas20 Intro - KC - 1GLD - V. Libres - P ArmónicaGonzalo Ezequiel RojasAún no hay calificaciones
- Informe - Reservorios ApoyadosDocumento47 páginasInforme - Reservorios ApoyadosNelson Terrones Ruiz100% (4)
- Unidad I Introduccion Al Metodo de Elemento FinitoDocumento19 páginasUnidad I Introduccion Al Metodo de Elemento FinitoAlex santosAún no hay calificaciones
- Informe Academico N 01 - Compress 1Documento12 páginasInforme Academico N 01 - Compress 1ESTEFANIA EMILY HUERTA JARAAún no hay calificaciones
- Clase02 Parte B FIUBA Predim AnalCargas 2013Documento24 páginasClase02 Parte B FIUBA Predim AnalCargas 2013paulkohanAún no hay calificaciones
- Física II - Teoría de Elasticidad.Documento41 páginasFísica II - Teoría de Elasticidad.Yohan Sanchez cornejoAún no hay calificaciones
- Pórtico Por Método Estándar de RigidezDocumento7 páginasPórtico Por Método Estándar de RigidezAndres RestrepoAún no hay calificaciones
- Identificación de Las Fallas Estructurales Más Comunes en La Edificación Actual de Guadalajara Jalisco para Su Estudio yDocumento12 páginasIdentificación de Las Fallas Estructurales Más Comunes en La Edificación Actual de Guadalajara Jalisco para Su Estudio yDistribuidor Y Asesor MercantilAún no hay calificaciones
- Vizcarra Arturo Dispositivo Conductividad Termica Anexos PDFDocumento199 páginasVizcarra Arturo Dispositivo Conductividad Termica Anexos PDFMartin SabusAún no hay calificaciones
- Taller#3 Rigidez y PesoDocumento4 páginasTaller#3 Rigidez y PesoJuan Diego CardonaAún no hay calificaciones
- 01 Diseño de Reservorio de 18 m3Documento9 páginas01 Diseño de Reservorio de 18 m3Wilson Diter Ñaupa TelloAún no hay calificaciones
- Analisis Matricial de Un Portico en Una Edificacion de 3 NivelesDocumento7 páginasAnalisis Matricial de Un Portico en Una Edificacion de 3 NivelesNicolai Torres Angulo33% (3)
- Análisis y Diseño de Elementos A Flexo CompresionDocumento37 páginasAnálisis y Diseño de Elementos A Flexo CompresionDaniel Camilo Pantoja Ocana0% (2)
- Exercises DinamicDocumento3 páginasExercises DinamicDaniel A. ManqueAún no hay calificaciones
- Ensayo de TorsionDocumento6 páginasEnsayo de TorsionVivi GarridoAún no hay calificaciones
- Metodo de Distribucion de Momentos (CrossDocumento23 páginasMetodo de Distribucion de Momentos (Crossjmartinez455083% (6)
- 01) Concreto Armado Semana 1-2Documento58 páginas01) Concreto Armado Semana 1-2Junior Huaman EscobarAún no hay calificaciones
- Aio3 U2Documento56 páginasAio3 U2Hans John Cuya TineoAún no hay calificaciones
- Practica 1 Tension en Acero MECANICA de MATERIALES 1Documento10 páginasPractica 1 Tension en Acero MECANICA de MATERIALES 1KoryGuzmánAún no hay calificaciones
- Capitulo FDocumento3 páginasCapitulo FFrancisco Javier Troncoso MelendezAún no hay calificaciones
- Resumen Del Libro de Estructuracion y Diseño de Edificaciones de Concreto ArmadoDocumento2 páginasResumen Del Libro de Estructuracion y Diseño de Edificaciones de Concreto Armadoyabeth cruz100% (1)
- Diseño de Pavimento Con DispaveDocumento30 páginasDiseño de Pavimento Con Dispavehander100% (1)
- Punto Tres Cercha - Rodrigo Mallungo CalderonDocumento4 páginasPunto Tres Cercha - Rodrigo Mallungo Calderonrodrigo.mallungoAún no hay calificaciones