También podría gustarte
- Documento de BienvenidaDocumento7 páginasDocumento de BienvenidaLuis Enrique CortezAún no hay calificaciones
- Tema7 - P1 - P2 - Diseno Estructural de Pilotes y Cabezales2Documento46 páginasTema7 - P1 - P2 - Diseno Estructural de Pilotes y Cabezales2Luis Enrique Cortez100% (1)
- CTE DB CimentacionesDocumento164 páginasCTE DB CimentacionesFrancisco Gimenez RothemundAún no hay calificaciones
- Tema7 - P1 - P2 - Diseno Estructural de Pilotes y Cabezales2Documento46 páginasTema7 - P1 - P2 - Diseno Estructural de Pilotes y Cabezales2Luis Enrique Cortez100% (1)
- Tema7 - P1 - P2 - Diseno Estructural de Pilotes y Cabezales2Documento46 páginasTema7 - P1 - P2 - Diseno Estructural de Pilotes y Cabezales2Luis Enrique Cortez100% (1)
- DC - Lista de Chequeo de Estudios Geotecnicos PDFDocumento2 páginasDC - Lista de Chequeo de Estudios Geotecnicos PDFLuis Enrique CortezAún no hay calificaciones
- PilotesDocumento52 páginasPilotesLuis Enrique CortezAún no hay calificaciones
- Ejercicio - Asentamiento Por Consolidacion en Grupo de PilotesDocumento6 páginasEjercicio - Asentamiento Por Consolidacion en Grupo de PilotesLuis Enrique CortezAún no hay calificaciones
- Tema10 - Recomendaciones Constructivas para PilotesDocumento32 páginasTema10 - Recomendaciones Constructivas para PilotesCristopher Trejo RodriguezAún no hay calificaciones
- Tema3 - P1 - Diseño Geotecnico de Pilotes Excavados e HincadosDocumento19 páginasTema3 - P1 - Diseño Geotecnico de Pilotes Excavados e HincadosLuis Enrique CortezAún no hay calificaciones
- DC1 Guia para La Realizacion de Estudios GeotecnicosDocumento17 páginasDC1 Guia para La Realizacion de Estudios Geotecnicosdenisfr79Aún no hay calificaciones
- Ejercicios - 3.1 - Ejemplos Diseño de Fundaciones Profundas - RBDocumento23 páginasEjercicios - 3.1 - Ejemplos Diseño de Fundaciones Profundas - RBLuis Enrique CortezAún no hay calificaciones
- Cimentaciones en RocaDocumento2 páginasCimentaciones en RocaLuis Enrique CortezAún no hay calificaciones
- Cimentaciones en RocaDocumento5 páginasCimentaciones en Rocaboris1516Aún no hay calificaciones
- DBC - Guaman - riegoOBRAS PDFDocumento125 páginasDBC - Guaman - riegoOBRAS PDFLuis Enrique CortezAún no hay calificaciones
- Capitulo 1Documento8 páginasCapitulo 1Luis Enrique CortezAún no hay calificaciones
- Cargas Sobre Estructuras PDFDocumento30 páginasCargas Sobre Estructuras PDFEdson Rodriguez CossioAún no hay calificaciones
- Capitulo 1Documento8 páginasCapitulo 1Luis Enrique CortezAún no hay calificaciones
- DBC - Guaman - riegoOBRAS PDFDocumento125 páginasDBC - Guaman - riegoOBRAS PDFLuis Enrique CortezAún no hay calificaciones
- Capitulo 1Documento5 páginasCapitulo 1Luis Enrique CortezAún no hay calificaciones
- Papisa JuanaDocumento7 páginasPapisa JuanaLuis Enrique CortezAún no hay calificaciones
- Capitulo 2Documento14 páginasCapitulo 2Luis Enrique CortezAún no hay calificaciones
- Marco TeoricoDocumento171 páginasMarco TeoricoLuis Enrique CortezAún no hay calificaciones
- Guía completa para el éxito en redes de mercadoDocumento133 páginasGuía completa para el éxito en redes de mercadoHugo Arce Multi Impresos ARCOAún no hay calificaciones
- Solicitud de Contratacion Personal Inia Apure Abril 2023Documento5 páginasSolicitud de Contratacion Personal Inia Apure Abril 2023iralisAún no hay calificaciones
- Eje 1Documento29 páginasEje 1jovenes por santanderAún no hay calificaciones
- I Guia Ii Parcial Ingenieria Economica Adolfo EspinalDocumento8 páginasI Guia Ii Parcial Ingenieria Economica Adolfo Espinaladolfo espinalAún no hay calificaciones
- Informe Topografía Practica 2Documento5 páginasInforme Topografía Practica 2Jose Gaita MarinAún no hay calificaciones
- Analisis de 3 Videos de EntrevistaDocumento4 páginasAnalisis de 3 Videos de EntrevistaAna Maria Leguizamon100% (1)
- Cirujia Plastica BoliviaDocumento3 páginasCirujia Plastica BoliviaRodrigo Iglesias TorresAún no hay calificaciones
- Liberacion Flash y DiferencialDocumento2 páginasLiberacion Flash y DiferencialvanessaAún no hay calificaciones
- Valoración Documental y Disposición Final de Los Documentos 2Documento15 páginasValoración Documental y Disposición Final de Los Documentos 2Jaime Andres Pinilla Torres45% (31)
- Libro CalculoDocumento13 páginasLibro CalculoMARX 704Aún no hay calificaciones
- Autocad Civil 3d 2018 AvanzadoDocumento11 páginasAutocad Civil 3d 2018 AvanzadoJahzeel Romero Espejo100% (1)
- Cira y PmaDocumento4 páginasCira y PmaMauro ContrerasAún no hay calificaciones
- EXT 4LoCMowkHmFcin9sqOsDDocumento3 páginasEXT 4LoCMowkHmFcin9sqOsDDaniel CamposAún no hay calificaciones
- Conceptos clave de estadísticaDocumento7 páginasConceptos clave de estadísticaCarlos Moises Espino RodríguezAún no hay calificaciones
- Mainboard: generalidades y componentes principalesDocumento10 páginasMainboard: generalidades y componentes principalesDamaso OspinoAún no hay calificaciones
- Taller EmpleabilidadDocumento55 páginasTaller EmpleabilidadAndresAún no hay calificaciones
- Bilinguismo y LnguajeDocumento2 páginasBilinguismo y LnguajeStoney QuirozAún no hay calificaciones
- Castigat Ridendo MoresDocumento12 páginasCastigat Ridendo MoresDesiluetas ViernesAún no hay calificaciones
- Test de WarteggDocumento56 páginasTest de WarteggPamelaAún no hay calificaciones
- Estrategias para Un Aprendizaje SignificativoDocumento39 páginasEstrategias para Un Aprendizaje Significativoragde_serrot100% (5)
- Concepto y Elementos Del MemorandumDocumento6 páginasConcepto y Elementos Del MemorandumAngelXtAún no hay calificaciones
- Eyal WeizmanDocumento9 páginasEyal WeizmanYelitza Xiomara Altamirano EstebanAún no hay calificaciones
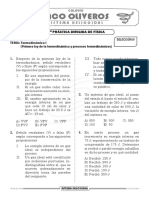
- 19 PD - Fisica Selección 4Documento8 páginas19 PD - Fisica Selección 4WALTER OLIVARI RAMIREZAún no hay calificaciones
- Infografia de Metodologia de La InvestigaciónDocumento1 páginaInfografia de Metodologia de La Investigaciónleydis98100% (2)
- CatastroDocumento10 páginasCatastroHarol Emerson Ccorahua PampañaupaAún no hay calificaciones
- El Libro de La Nada - OshoDocumento213 páginasEl Libro de La Nada - Osho56a92e85b589b100% (5)
- Orca Share Media1462153740975Documento62 páginasOrca Share Media1462153740975marbinAún no hay calificaciones
- Terremoto de Cariaco Trabajo OriginalDocumento25 páginasTerremoto de Cariaco Trabajo OriginalJose SalazarAún no hay calificaciones
- Ensayo N°3 - Corte DirectoDocumento19 páginasEnsayo N°3 - Corte DirectoDanne FransisAún no hay calificaciones
- Configurar VMD cámaras Alarm.comDocumento10 páginasConfigurar VMD cámaras Alarm.comcrami80Aún no hay calificaciones