También podría gustarte
- Validación Del Producto o ProcesoDocumento10 páginasValidación Del Producto o ProcesoLaureano Garcia MondragonAún no hay calificaciones
- Importancia Del Correo ElectronicoDocumento3 páginasImportancia Del Correo ElectronicocristianAún no hay calificaciones
- Montaje y Tecnicas de Alineacion Unidad 5Documento18 páginasMontaje y Tecnicas de Alineacion Unidad 5Raul CruzAún no hay calificaciones
- Unidad 6.Documento43 páginasUnidad 6.Raul Cruz0% (3)
- Unidad 6.Documento43 páginasUnidad 6.Raul Cruz0% (3)
- Problemas Unidad 15 Termodinamica CengelDocumento27 páginasProblemas Unidad 15 Termodinamica CengelEmmitaa Salas Santos75% (8)
- Stern La Era de La Insurrección Andina PDFDocumento47 páginasStern La Era de La Insurrección Andina PDFanon_931412921Aún no hay calificaciones
- Electricidad y Magnetismo Unidad 2,3,4 y 5Documento41 páginasElectricidad y Magnetismo Unidad 2,3,4 y 5Raul CruzAún no hay calificaciones
- Especificación Edificio Alcalde Pedro AlarcónDocumento57 páginasEspecificación Edificio Alcalde Pedro AlarcónChristopher AlvialAún no hay calificaciones
- Montaje y Tecnicas de Alineacion Unidad 5Documento17 páginasMontaje y Tecnicas de Alineacion Unidad 5Raul Cruz100% (1)
- Manual CronoDocumento80 páginasManual CronorocondealAún no hay calificaciones
- Caso Practicos MF1442 - 3Documento5 páginasCaso Practicos MF1442 - 3Vanessa Villaran0% (1)
- Exa1G1erBloque2016 17MEDocumento14 páginasExa1G1erBloque2016 17MECandi CelisAún no hay calificaciones
- Unidad 6Documento9 páginasUnidad 6Raul CruzAún no hay calificaciones
- 1213Documento8 páginas1213Jessica Valentina Zarama BuriticaAún no hay calificaciones
- Sistemas de IluminaciónDocumento23 páginasSistemas de IluminaciónRomario Vasquez SanchezAún no hay calificaciones
- Estufa EcologicaDocumento19 páginasEstufa EcologicaRaul CruzAún no hay calificaciones
- Unidad 6Documento9 páginasUnidad 6Raul CruzAún no hay calificaciones
- Máquinas y Equipos Térmicos I PDFDocumento10 páginasMáquinas y Equipos Térmicos I PDFDiego 117Aún no hay calificaciones
- Sistemas de IluminaciónDocumento23 páginasSistemas de IluminaciónRomario Vasquez SanchezAún no hay calificaciones
- Instituto Tecnologico Del ItsmoDocumento19 páginasInstituto Tecnologico Del ItsmoRaul CruzAún no hay calificaciones
- Unidad 6Documento1 páginaUnidad 6Raul CruzAún no hay calificaciones
- Producción de Energía NeumáticaDocumento64 páginasProducción de Energía NeumáticaHernandez Moises50% (6)
- Memoria Técnico Descriptiva 1Documento8 páginasMemoria Técnico Descriptiva 1Raul CruzAún no hay calificaciones
- Instituto Tecnologico Del ItsmoDocumento19 páginasInstituto Tecnologico Del ItsmoRaul CruzAún no hay calificaciones
- Ejercicios U2. Bombas CentrífugasDocumento4 páginasEjercicios U2. Bombas CentrífugasRaul CruzAún no hay calificaciones
- Producción de Energía NeumáticaDocumento64 páginasProducción de Energía NeumáticaHernandez Moises50% (6)
- Tipos de FichasDocumento3 páginasTipos de FichasRaul CruzAún no hay calificaciones
- Proceso AdministrativoDocumento4 páginasProceso AdministrativoRaul CruzAún no hay calificaciones
- Instituto Tecnologico Del ItsmoDocumento19 páginasInstituto Tecnologico Del ItsmoRaul CruzAún no hay calificaciones
- INSTALACIONES-ELECTRICAS ImprimirDocumento23 páginasINSTALACIONES-ELECTRICAS Imprimirddd2589% (27)
- Diseño de EjesDocumento48 páginasDiseño de EjesRaul Cruz100% (1)
- ElectrostaticaDocumento17 páginasElectrostaticaRaul CruzAún no hay calificaciones
- Mecanica de Los Materiales 6 UnidadesDocumento24 páginasMecanica de Los Materiales 6 UnidadesRaul Cruz50% (4)
- UNIDAD IV Fundamentos de InvestigacionDocumento7 páginasUNIDAD IV Fundamentos de InvestigacionRaul CruzAún no hay calificaciones
- Informe de CriptografiaDocumento7 páginasInforme de CriptografiaLuis TreviñoAún no hay calificaciones
- Actividad Bitacora de Referencias (Autoguardado)Documento3 páginasActividad Bitacora de Referencias (Autoguardado)Abel PedrazaAún no hay calificaciones
- SdiE 2019 PDFDocumento463 páginasSdiE 2019 PDFAndyAún no hay calificaciones
- ACTIVIDAD No. 1 PACKET TRACERDocumento2 páginasACTIVIDAD No. 1 PACKET TRACERtatiana gonzalezAún no hay calificaciones
- Evaluacion - de - Producto Archivo Central 2Documento2 páginasEvaluacion - de - Producto Archivo Central 2karen leonAún no hay calificaciones
- If-P21-F22 Formato Hoja de Vida de Equipos - Laboratorio de Indicadores de Calidad de Aguas y LodosDocumento3 páginasIf-P21-F22 Formato Hoja de Vida de Equipos - Laboratorio de Indicadores de Calidad de Aguas y LodosSoporte Tecnología OcsystemAún no hay calificaciones
- PFC Juancarlos Vazquez CastilloDocumento176 páginasPFC Juancarlos Vazquez CastilloivazubaAún no hay calificaciones
- Hydrotrainer 200Documento24 páginasHydrotrainer 200elmfp7774676Aún no hay calificaciones
- Mapa Conceptual Taxonomía de ShoreDocumento1 páginaMapa Conceptual Taxonomía de ShoreFrancisco Bozo100% (1)
- Glosario de Terminos de EdiciónDocumento8 páginasGlosario de Terminos de EdiciónSebastian BeckerAún no hay calificaciones
- UPS2019Documento15 páginasUPS2019Gerardo D. AguilarAún no hay calificaciones
- UV Carta Aceptación Estudiante Examen SUMADI-Q1 2023Documento2 páginasUV Carta Aceptación Estudiante Examen SUMADI-Q1 2023HectorAún no hay calificaciones
- Jiji JijaDocumento4 páginasJiji JijaIbarra CHAún no hay calificaciones
- Formato de Hoja de VidaDocumento2 páginasFormato de Hoja de VidaVictor Janco CondoriAún no hay calificaciones
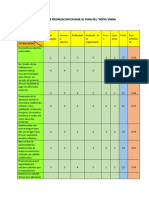
- Matriz de Prioridad Foda Hotel VinisaDocumento2 páginasMatriz de Prioridad Foda Hotel VinisaDiana RiosAún no hay calificaciones
- Capitulo 7. Entrada y Salida DatosDocumento15 páginasCapitulo 7. Entrada y Salida DatosGONZALES SALAZAR DIEGO ALONZOAún no hay calificaciones
- Metodologia Capital SocialDocumento343 páginasMetodologia Capital SocialJuan Manuel SanchezAún no hay calificaciones
- 12 de MayoDocumento3 páginas12 de Mayo402 MS - JAVIER SEBASTIAN RAMIREZ CATALANAún no hay calificaciones
- Sistema de Control y Gestión de Mantenimiento Con Base en La Metodología Sigema de La Empresa Suministros Marben, C.A Maturín Estado MonagasDocumento110 páginasSistema de Control y Gestión de Mantenimiento Con Base en La Metodología Sigema de La Empresa Suministros Marben, C.A Maturín Estado MonagasMirnaSalazarAún no hay calificaciones
- Características de La Memoria RAMDocumento12 páginasCaracterísticas de La Memoria RAMJORGE TUPIAAún no hay calificaciones
- PDFDocumento2 páginasPDFVictor ZbAún no hay calificaciones
- VERANO - ADUNI - Álgebra - Teoría 8Documento10 páginasVERANO - ADUNI - Álgebra - Teoría 8Fernanda ChipanaAún no hay calificaciones
- OptimizacionDocumento62 páginasOptimizacionPablo Ignacio Rivas MirandaAún no hay calificaciones
- TESINADocumento64 páginasTESINACruz DiazAún no hay calificaciones