También podría gustarte
- Teoría y Árbol de DecisionesDocumento5 páginasTeoría y Árbol de Decisionesjats_z100% (10)
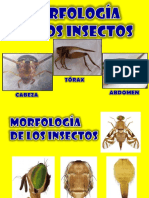
- Morfología de InsectosDocumento212 páginasMorfología de InsectosDanielParedesAguinagaAún no hay calificaciones
- Psicomotricidad Lois BlyDocumento24 páginasPsicomotricidad Lois BlyNatalia Donoso PérezAún no hay calificaciones
- Resultados de La SimulaciónDocumento3 páginasResultados de La SimulaciónJorge Lopez RamosAún no hay calificaciones
- Maquinas Electricas Supletorios FDocumento12 páginasMaquinas Electricas Supletorios FJorge Lopez RamosAún no hay calificaciones
- Deber 1Documento9 páginasDeber 1Jorge Lopez RamosAún no hay calificaciones
- Poderosísimo MergedDocumento159 páginasPoderosísimo MergedJorge Lopez RamosAún no hay calificaciones
- DEBER de Estructuras y CarcasasDocumento12 páginasDEBER de Estructuras y CarcasasJorge Lopez RamosAún no hay calificaciones
- Formato de Ficha AmbientalDocumento11 páginasFormato de Ficha AmbientalJorge Lopez RamosAún no hay calificaciones
- Resultados de La SimulaciónDocumento3 páginasResultados de La SimulaciónJorge Lopez RamosAún no hay calificaciones
- Deber 1 RaroDocumento9 páginasDeber 1 RaroJorge Lopez RamosAún no hay calificaciones
- Plan de Manejo AmbientalDocumento9 páginasPlan de Manejo AmbientalJorge Lopez RamosAún no hay calificaciones
- Dimenciones de BombosDocumento9 páginasDimenciones de BombosJorge Lopez RamosAún no hay calificaciones
- Teoria de LevasDocumento7 páginasTeoria de LevasJorge Lopez RamosAún no hay calificaciones
- Plan AgregadoDocumento3 páginasPlan AgregadoJorge Lopez RamosAún no hay calificaciones
- Plan AgregadoDocumento3 páginasPlan AgregadoJorge Lopez RamosAún no hay calificaciones
- Denavit HDocumento4 páginasDenavit HJorge Lopez RamosAún no hay calificaciones
- Bases Gestión AmbientalDocumento5 páginasBases Gestión AmbientalJorge Lopez RamosAún no hay calificaciones
- EJERCICIO Técnicas de LocalizaciónDocumento9 páginasEJERCICIO Técnicas de LocalizaciónJorge Lopez RamosAún no hay calificaciones
- Levas - IntroducciónDocumento34 páginasLevas - IntroducciónJorge Lopez RamosAún no hay calificaciones
- Técnica 5W 1HDocumento1 páginaTécnica 5W 1HJorge Lopez RamosAún no hay calificaciones
- Comercio InternacionalDocumento81 páginasComercio InternacionalSteven DomínguezAún no hay calificaciones
- Compresor MembranaDocumento14 páginasCompresor MembranaJorge Lopez RamosAún no hay calificaciones
- Jorge Lopez - Factores de Las Conductas Del ConsumidorDocumento1 páginaJorge Lopez - Factores de Las Conductas Del ConsumidorJorge Lopez RamosAún no hay calificaciones
- Levas - IntroducciónDocumento34 páginasLevas - IntroducciónJorge Lopez RamosAún no hay calificaciones
- Procesos de Manufactura"Metales"Documento14 páginasProcesos de Manufactura"Metales"Jorge Lopez Ramos100% (1)
- Levas - IntroducciónDocumento34 páginasLevas - IntroducciónJorge Lopez RamosAún no hay calificaciones
- Columnas-Diseño EjercixixeDocumento4 páginasColumnas-Diseño EjercixixeJorge Lopez RamosAún no hay calificaciones
- Algoritmo de ConfiguraciónDocumento1 páginaAlgoritmo de ConfiguraciónJorge Lopez RamosAún no hay calificaciones
- Technical University of AmbatoDocumento5 páginasTechnical University of AmbatoJorge Lopez RamosAún no hay calificaciones
- HistoriaDocumento6 páginasHistoriaJorge Lopez RamosAún no hay calificaciones
- Composición de La Población en ColombiaDocumento22 páginasComposición de La Población en ColombiaDiego Ferney AlvaradoAún no hay calificaciones
- Tema 16 Embriologia 2Documento15 páginasTema 16 Embriologia 2Aksa DuarteAún no hay calificaciones
- Teorías Del Español AmericanoDocumento5 páginasTeorías Del Español AmericanoAdriana FloresAún no hay calificaciones
- Teodoro Nuñez UretaDocumento3 páginasTeodoro Nuñez Uretaluis_rodriguez_29550% (2)
- Informe Carne DanielaDocumento4 páginasInforme Carne Danielaanderson orozco aguirreAún no hay calificaciones
- El TahuantinsuyoDocumento2 páginasEl TahuantinsuyoLilidel Maive Min HoAún no hay calificaciones
- 77° Aniversario Rio TamboDocumento110 páginas77° Aniversario Rio TambopoulblancoAún no hay calificaciones
- TallerDocumento72 páginasTallerpostillo123Aún no hay calificaciones
- Temas de Anatomía Humana II Bimestre para 5to GradoDocumento15 páginasTemas de Anatomía Humana II Bimestre para 5to GradoHender Iker Llauce ChapoñanAún no hay calificaciones
- Examen Latin Sept2009 CantabriaDocumento1 páginaExamen Latin Sept2009 CantabriaJavier SánchezAún no hay calificaciones
- Actividades para DisfoniasDocumento5 páginasActividades para DisfoniasDalpa RiveraAún no hay calificaciones
- 04 Saja - CureñasDocumento2 páginas04 Saja - CureñasRoberto RedCántabra DesarrolloRuralAún no hay calificaciones
- Testigo presencial de la tragedia de CajamarcaDocumento8 páginasTestigo presencial de la tragedia de Cajamarcamarco solanoAún no hay calificaciones
- Práctica 1. 2018-2Documento6 páginasPráctica 1. 2018-2Chessmaster98Aún no hay calificaciones
- Musculos Del ToraxDocumento4 páginasMusculos Del ToraxZeuxis VargasAún no hay calificaciones
- Asociaciones de Pares BiomagneticosDocumento36 páginasAsociaciones de Pares BiomagneticosSilvia Gálvez MonsalveAún no hay calificaciones
- Nivel de conocimiento sobre lactancia materna en madres adolescentesDocumento22 páginasNivel de conocimiento sobre lactancia materna en madres adolescentesbonboncita24Aún no hay calificaciones
- Tesis Damian Final - 2015Documento80 páginasTesis Damian Final - 2015Emiro Mena Murillo100% (1)
- Terapia Miofuncional en FisuradosDocumento17 páginasTerapia Miofuncional en FisuradosBárbara G. PalmaAún no hay calificaciones
- Cicloestral Delcuy PDFDocumento2 páginasCicloestral Delcuy PDFIrvin Christian Saint Ticlla LeivaAún no hay calificaciones
- Casi PerroDocumento6 páginasCasi PerroJoana Frutos100% (1)
- Prctica 1 Aparatos Reproductores en VertebradosDocumento5 páginasPrctica 1 Aparatos Reproductores en Vertebradosapi-261817550Aún no hay calificaciones
- Crochet búho azul pasoDocumento7 páginasCrochet búho azul pasosupermamon5Aún no hay calificaciones
- Deambulando Por La Orilla OscuraDocumento8 páginasDeambulando Por La Orilla OscuraHector JerezAún no hay calificaciones
- El Cuaderno Perdido de Claudio GayDocumento56 páginasEl Cuaderno Perdido de Claudio GayIsidora TrombenAún no hay calificaciones
- Lesion Elemental PrimariaDocumento2 páginasLesion Elemental PrimariaMa ChAún no hay calificaciones
- Parejas Liberales Follo A Mujer en MadridDocumento3 páginasParejas Liberales Follo A Mujer en MadridEroticoAún no hay calificaciones
- Valoracion Neurologica Del Recien NacidoDocumento31 páginasValoracion Neurologica Del Recien NacidoKiKa MaRía100% (1)