También podría gustarte
- Ejercicios ArbolesDocumento22 páginasEjercicios ArbolesDavid852hz100% (1)
- Unidad 4Documento36 páginasUnidad 4David Lopez Martinez0% (1)
- Calculo de Engranajes RectosDocumento1 páginaCalculo de Engranajes RectosErick Javier Torres Manotas.75% (8)
- Caja ReductoraDocumento17 páginasCaja ReductoraDaniel David Delgado100% (1)
- Transmision Por Bandas y Por CadenasDocumento23 páginasTransmision Por Bandas y Por CadenasPaul Ezequias Herreras Bañico100% (1)
- Compresores AxialesDocumento13 páginasCompresores AxialesKathy ChicaizaAún no hay calificaciones
- Geometria de FiloDocumento3 páginasGeometria de Filoco-ka06Aún no hay calificaciones
- Entallado Fellows 2Documento14 páginasEntallado Fellows 2Glenn CM100% (4)
- Caja Reductora 11111Documento47 páginasCaja Reductora 11111Diego Ledesma100% (3)
- Analisis de Fallas en EngranajesDocumento95 páginasAnalisis de Fallas en EngranajesAnonymous ABPUPbK86% (7)
- Tipos de Engranajes y Sus AplicacionesDocumento17 páginasTipos de Engranajes y Sus AplicacionesEmmanuel GonzalezAún no hay calificaciones
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Caja de Cambios, Armado PDFDocumento51 páginasCaja de Cambios, Armado PDFjrincon26Aún no hay calificaciones
- 646 SSP Audi A4 (Tipo 8W) Sistemas Eléctricos y Electrónicos Del VehículoDocumento72 páginas646 SSP Audi A4 (Tipo 8W) Sistemas Eléctricos y Electrónicos Del VehículoErik Lara Cravero100% (2)
- C03 Interruptores TermomagneticosDocumento56 páginasC03 Interruptores TermomagneticosNico GallegosAún no hay calificaciones
- Engranajes HelicoidalesDocumento8 páginasEngranajes HelicoidalesJosue FloresAún no hay calificaciones
- Engranajes HelicoidalesDocumento17 páginasEngranajes HelicoidalesJoseCorreaAún no hay calificaciones
- Ejes y Arboles - ChavetasDocumento23 páginasEjes y Arboles - ChavetasDacri Dyz YacilaAún no hay calificaciones
- Expo CNCDocumento9 páginasExpo CNCEmiliano Baeza HernandezAún no hay calificaciones
- Engranajes ConicosDocumento25 páginasEngranajes ConicosPaul García YepezAún no hay calificaciones
- Aplicacion de Engranajes ConicosDocumento13 páginasAplicacion de Engranajes ConicosPaul García YepezAún no hay calificaciones
- Informe EngranajeDocumento6 páginasInforme EngranajeBrenda LuciaAún no hay calificaciones
- Tornillo Sin FinDocumento33 páginasTornillo Sin FinGiancarlo ValerianoAún no hay calificaciones
- Calculo y Dibujo de EngranesDocumento16 páginasCalculo y Dibujo de EngranesOmar Saul92% (66)
- Tallado de Engranajes Hipoidales - PPT ORIGINALDocumento38 páginasTallado de Engranajes Hipoidales - PPT ORIGINALWilber Marcelo Apaz Arancibia50% (2)
- Calculo de Correas 3Documento4 páginasCalculo de Correas 3betoben100% (14)
- Tornillos de PotenciaDocumento12 páginasTornillos de PotenciaRommel I. C Cruz100% (3)
- Unidad Iii Engranes PlanetariosDocumento11 páginasUnidad Iii Engranes PlanetariosGarcia Asmad Jhonn100% (1)
- Caculo EngranajeDocumento67 páginasCaculo Engranajesantiago100% (3)
- Tipos de EngranesDocumento11 páginasTipos de Engranesangelipn100% (14)
- Ensayo de Engranes y LevasDocumento9 páginasEnsayo de Engranes y LevasMECANICA16Aún no hay calificaciones
- Union Entre Cubos y ArbolesDocumento21 páginasUnion Entre Cubos y Arbolesoshea7100% (2)
- CavDocumento8 páginasCavOrlando VelecelaAún no hay calificaciones
- Generadores de Corriente AlternaDocumento7 páginasGeneradores de Corriente AlternaLaliAún no hay calificaciones
- Engranajes HelicoidalesDocumento10 páginasEngranajes HelicoidalesKevin Pizarro JorgeAún no hay calificaciones
- Diseño de FlechasDocumento82 páginasDiseño de FlechasTAYRON IVAN MORA AGUILARAún no hay calificaciones
- EngranesDocumento11 páginasEngranesGabrielAún no hay calificaciones
- Engranes Helicoidales CruzadosDocumento2 páginasEngranes Helicoidales CruzadosAlan Mg0% (1)
- 5.4 Aplicaciones de Los Ejes de TransmisiónDocumento7 páginas5.4 Aplicaciones de Los Ejes de TransmisiónvanoiAún no hay calificaciones
- Tipos de EngranajesDocumento11 páginasTipos de EngranajesEdwin Dario Bustos UrregoAún no hay calificaciones
- Guia de TornillosDocumento11 páginasGuia de TornillosCesar Estiven VargasAún no hay calificaciones
- Trasmisiones de Potencia, AcoplesDocumento27 páginasTrasmisiones de Potencia, AcoplesNataliaNoriegaAún no hay calificaciones
- Fresas de 2 y 4 LabiosDocumento14 páginasFresas de 2 y 4 Labiosricardogarcia23Aún no hay calificaciones
- Generalidades Sobre RodamientosDocumento69 páginasGeneralidades Sobre RodamientosMartinez JuanmaAún no hay calificaciones
- Tutorial Engranajes ConicosDocumento5 páginasTutorial Engranajes ConicosDiego PazmiñoAún no hay calificaciones
- Diseño de Arboles y EjesDocumento22 páginasDiseño de Arboles y EjesRicardo Amezquita100% (2)
- Trazado de EngranajesDocumento28 páginasTrazado de Engranajeskellerman44Aún no hay calificaciones
- Mecanismo PantógrafoDocumento16 páginasMecanismo PantógrafoCarlos BustamanteAún no hay calificaciones
- Para La Transmisión de Torque de Una Máquina Motriz A Una Máquina ConducidaDocumento9 páginasPara La Transmisión de Torque de Una Máquina Motriz A Una Máquina ConducidaingdianamartinezAún no hay calificaciones
- Diseño de Ejes de Transmisión de Potencia (Ejercicio)Documento21 páginasDiseño de Ejes de Transmisión de Potencia (Ejercicio)Neginot Ferrer Parra83% (6)
- Criterios de DISEÑO D ELEMENTOS MECANICOSDocumento28 páginasCriterios de DISEÑO D ELEMENTOS MECANICOSAntonio PantaleonAún no hay calificaciones
- EngranajesDocumento32 páginasEngranajesErick Iñaguazo Pindo100% (3)
- Cálculo de Engranajes PDFDocumento48 páginasCálculo de Engranajes PDFanderAún no hay calificaciones
- Engranes RectosDocumento4 páginasEngranes RectosIsraelPerezSanchezAún no hay calificaciones
- 1 2do Mecanizado Clas2Documento10 páginas1 2do Mecanizado Clas2Jose BallesterAún no hay calificaciones
- ENGRANAJES GeneralidadesDocumento16 páginasENGRANAJES GeneralidadesManuel RodriguezAún no hay calificaciones
- Trabajo Terminado de EngranajesDocumento15 páginasTrabajo Terminado de EngranajesgatoAún no hay calificaciones
- Tipos de EngranesDocumento5 páginasTipos de EngranesCleiver Öf̲̲̅̅ı̲̲̅̅c̲̲̅̅ı̲̲̅̅a̲̲̅̅l̲̲̅̅'̲̲̅̅f̲̲̅̅b GVAún no hay calificaciones
- Diseño de Engranajes ConicosDocumento23 páginasDiseño de Engranajes ConicosGerbercp Condori Palacios50% (4)
- Caracteristicas de Los Distintos Tipos de EngranajesDocumento4 páginasCaracteristicas de Los Distintos Tipos de Engranajes941884782Aún no hay calificaciones
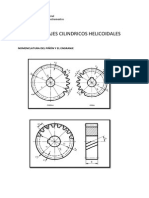
- Engranajes Cilíndricos de Dientes Helicoidales Tema para Procesos de Manuf.Documento9 páginasEngranajes Cilíndricos de Dientes Helicoidales Tema para Procesos de Manuf.Alejandro Ramirez GomezAún no hay calificaciones
- Tipos de EngranajesDocumento9 páginasTipos de EngranajesCristiano De Jesus Louperz ZentenoAún no hay calificaciones
- Montaje de conjuntos y estructuras fijas o desmontables. FMEE0108De EverandMontaje de conjuntos y estructuras fijas o desmontables. FMEE0108Aún no hay calificaciones
- Que Es Motores BrushlessDocumento3 páginasQue Es Motores BrushlessGabrielAún no hay calificaciones
- Informe Previo 03Documento15 páginasInforme Previo 03Jimmy CarlosAún no hay calificaciones
- Vega Blas PROCEDIMIENTODocumento4 páginasVega Blas PROCEDIMIENTOAlex vega blasAún no hay calificaciones
- Medida de La Inductancia Mutua en Un Circuito AcopladoDocumento10 páginasMedida de La Inductancia Mutua en Un Circuito AcopladoAbel Alberto Alvarez BlasAún no hay calificaciones
- Calcular Regulador SolarDocumento3 páginasCalcular Regulador SolarSantiago ChickyAún no hay calificaciones
- BoliviaDocumento2 páginasBoliviaLlanque Motors AqpAún no hay calificaciones
- ELECTROESTIMULADOR EP4 Manual de Usuario SPA PDFDocumento122 páginasELECTROESTIMULADOR EP4 Manual de Usuario SPA PDFJcamilo03Aún no hay calificaciones
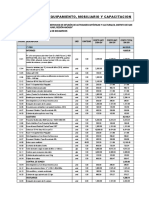
- Presupuesto EquipamientoDocumento14 páginasPresupuesto EquipamientowilderdoloresAún no hay calificaciones
- TP 1 Recursos InformaticosDocumento10 páginasTP 1 Recursos InformaticosMarcia SerinoAún no hay calificaciones
- Grupo 1 Interruptor de Precion de AceiteDocumento13 páginasGrupo 1 Interruptor de Precion de AceiteJhasser jossiel Flores conisllaAún no hay calificaciones
- TAREA GRUPO #3 Relevador 60 y 67Documento8 páginasTAREA GRUPO #3 Relevador 60 y 67VALERIA SOFIA CARCAMO SARMIENTOAún no hay calificaciones
- Dibujo Mecanico Terminologia Casi Completo IIDocumento9 páginasDibujo Mecanico Terminologia Casi Completo IIJosé SandovalAún no hay calificaciones
- GFM4NDocumento2 páginasGFM4Nrobertotoro2014Aún no hay calificaciones
- StroberDocumento10 páginasStroberBryAn CAutiAún no hay calificaciones
- Inv. Final 4-01-21Documento59 páginasInv. Final 4-01-21Cristian Lazaro AriasAún no hay calificaciones
- Practica Prueba de Factor de PotenciaDocumento3 páginasPractica Prueba de Factor de PotenciaOctavio VlqzRz100% (1)
- LP DAHUA Cliente Final Agosto Con Link 2020Documento6 páginasLP DAHUA Cliente Final Agosto Con Link 2020Kevin Jhoan Sanches VillamilAún no hay calificaciones
- Sistema Estéreo Con Reproductor de Discos Compactos SC-MAX3600 SC-AKX930 SC-AKX730Documento24 páginasSistema Estéreo Con Reproductor de Discos Compactos SC-MAX3600 SC-AKX930 SC-AKX730alejandroAún no hay calificaciones
- Energizador Hydra 2000 I y IIDocumento4 páginasEnergizador Hydra 2000 I y IIHebert PachecoAún no hay calificaciones
- Patagonian Eagle 250 Darkroad: Manual de UsuarioDocumento40 páginasPatagonian Eagle 250 Darkroad: Manual de UsuarioSalvador SanchezAún no hay calificaciones
- Ud02 Electrónica AnalógicaDocumento8 páginasUd02 Electrónica AnalógicajoseromanferAún no hay calificaciones
- Control Remoto Diagrama PDFDocumento273 páginasControl Remoto Diagrama PDFNoe Rafael Fernandez GonzalezAún no hay calificaciones
- Servo Transmisiones de ContraejesDocumento17 páginasServo Transmisiones de ContraejesMichael Alcantara100% (6)
- Informe LuminotécnicoDocumento8 páginasInforme LuminotécnicoLorena BenavidezAún no hay calificaciones
- Laboratorio - Sandra Montejo - 100414 - 152Documento10 páginasLaboratorio - Sandra Montejo - 100414 - 152KmiSzAún no hay calificaciones
- Manual Summacut PDFDocumento93 páginasManual Summacut PDFFernando Melo MarquesAún no hay calificaciones
- Protocolo Puesta A Tierra - #1 - JARDÍN FRONTAL INGRESODocumento4 páginasProtocolo Puesta A Tierra - #1 - JARDÍN FRONTAL INGRESOMagIng Miguel Angel Sedano TapiaAún no hay calificaciones