También podría gustarte
- Análisis Dinámico de Mecanismos 2021-1 - Sesion6Documento76 páginasAnálisis Dinámico de Mecanismos 2021-1 - Sesion6Walter Raul Valentin AlvarezAún no hay calificaciones
- Erro NormalizadoDocumento2 páginasErro Normalizadojencopa100% (6)
- Problemas de Cinemática ResueltosDocumento36 páginasProblemas de Cinemática ResueltosGui Per100% (1)
- Cuaderno de Prácticas de Laboratorio Ciencias II 2016Documento74 páginasCuaderno de Prácticas de Laboratorio Ciencias II 2016Myttel Delgado71% (7)
- El Ángulo Entre Los Vectores U2 y U3Documento6 páginasEl Ángulo Entre Los Vectores U2 y U3AMOR YTAún no hay calificaciones
- Fundaciones de Equipos VIBRATORIOSDocumento73 páginasFundaciones de Equipos VIBRATORIOSsalgatranAún no hay calificaciones
- Fundaciones de EquiposDocumento73 páginasFundaciones de EquiposLeon Lenguitas Muñoz ValdesAún no hay calificaciones
- GEOMETRIA y TRIGONOMETRIADocumento28 páginasGEOMETRIA y TRIGONOMETRIADavid CruzAún no hay calificaciones
- Unidad 2Documento27 páginasUnidad 2RopisDayannaAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Integracion VectorialDocumento24 páginasIntegracion VectorialAngelManuelOrdayaRiosAún no hay calificaciones
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Derivadas de Funciones VectorialesDocumento5 páginasDerivadas de Funciones VectorialesMedin Alexander BarrosoAún no hay calificaciones
- Ejercicios Vectores 2Documento7 páginasEjercicios Vectores 2Danilo Roa LopezAún no hay calificaciones
- Dinamica D e Cuerpo RigidoDocumento24 páginasDinamica D e Cuerpo Rigidobecto67% (3)
- Matemática en Las Ciencias Naturales PDFDocumento195 páginasMatemática en Las Ciencias Naturales PDFGuirs Rs100% (1)
- Teoria de MecanismosDocumento48 páginasTeoria de MecanismosManuel Diaz AvilesAún no hay calificaciones
- Tema3-Cinematica MecanismosDocumento48 páginasTema3-Cinematica Mecanismosjoiron24Aún no hay calificaciones
- Biela Manivela Ale TerminadoDocumento9 páginasBiela Manivela Ale Terminado120ryAún no hay calificaciones
- Capitulo 6 Cinematica Del Cuerpo Rigido PDFDocumento64 páginasCapitulo 6 Cinematica Del Cuerpo Rigido PDFFernando Genaro Contreras Blancas100% (1)
- UntitledDocumento10 páginasUntitledTito VilchezAún no hay calificaciones
- Cinematica 2DDocumento59 páginasCinematica 2DChristopher Aguilar NuñezAún no hay calificaciones
- Solucionario Harry NaraDocumento11 páginasSolucionario Harry NaraJPablo Gutiérrez RamosAún no hay calificaciones
- Vigas Hiperestaticas 1 1Documento17 páginasVigas Hiperestaticas 1 1Cathy RodriguezAún no hay calificaciones
- Cinematic ADocumento24 páginasCinematic AJairo Manuel Saavedra AcostaAún no hay calificaciones
- Aplicaciones Teóricas Propuestas Tema 4 Libro TMM (2 Ed) (Resueltas)Documento12 páginasAplicaciones Teóricas Propuestas Tema 4 Libro TMM (2 Ed) (Resueltas)Xsds sdsdsAún no hay calificaciones
- Ejercicio 6Documento10 páginasEjercicio 6delfoAún no hay calificaciones
- Problemas Propuestos para Dinamica Trabajo 5-1 PDFDocumento18 páginasProblemas Propuestos para Dinamica Trabajo 5-1 PDFWuber RojasAún no hay calificaciones
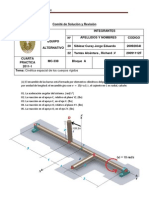
- Bloque (A) Dinamica 4ta PracticaDocumento5 páginasBloque (A) Dinamica 4ta PracticaJorge SibleszAún no hay calificaciones
- Tarea de Aplicacion 2 DinamicaDocumento12 páginasTarea de Aplicacion 2 Dinamicawilliam pacasAún no hay calificaciones
- Mecanismos de Eslabones ArticularesDocumento11 páginasMecanismos de Eslabones ArticularesCarlos JaureguiAún no hay calificaciones
- Problemario 1Documento36 páginasProblemario 1Jesus Clara100% (1)
- Ecuaciones Proyecto MecanismosDocumento22 páginasEcuaciones Proyecto MecanismosRicardo LeonAún no hay calificaciones
- Sintes 1Documento42 páginasSintes 1Ivan GarzonAún no hay calificaciones
- Trabajo Final DinámicaDocumento44 páginasTrabajo Final DinámicaEstefani GuizadoAún no hay calificaciones
- Coordenadas CilindricasDocumento30 páginasCoordenadas CilindricasRicardo AndreAún no hay calificaciones
- Acelerometro ArduinoDocumento9 páginasAcelerometro ArduinoDavid Andres Cañas Suarez100% (1)
- Analisis Cinematico Algebra ComplejaDocumento25 páginasAnalisis Cinematico Algebra ComplejaJhon SánchezAún no hay calificaciones
- 3M Cinematica Del Movimiento PlanoDocumento19 páginas3M Cinematica Del Movimiento PlanoRoger ChungAún no hay calificaciones
- Mecanismo Manivela-CorrederaDocumento5 páginasMecanismo Manivela-CorrederadavidAún no hay calificaciones
- 6 Analisis de LevasDocumento23 páginas6 Analisis de LevasMarisluar Ruz de MatosAún no hay calificaciones
- Aplastadora de LatasDocumento8 páginasAplastadora de LatasAlejandro Maldonado0% (1)
- Hoja6 Cinematica3Documento7 páginasHoja6 Cinematica3Armando SarangoAún no hay calificaciones
- Boletin T2-Geometria - Retorno Rapido 03Documento4 páginasBoletin T2-Geometria - Retorno Rapido 03academiaceltaAún no hay calificaciones
- Mecánica de Máquinas (1) - 1Documento93 páginasMecánica de Máquinas (1) - 1Jimmy HuertaAún no hay calificaciones
- Semana1 140406144747 Phpapp01Documento8 páginasSemana1 140406144747 Phpapp01Manuel Jesus Palacios CruzAún no hay calificaciones
- Lab 4 Mecanismos INFORMEDocumento12 páginasLab 4 Mecanismos INFORMEAnderson Raferti Loja LopezAún no hay calificaciones
- Análisis Velocidad y Aceleración Mecanismo para Compactar Latas-1Documento5 páginasAnálisis Velocidad y Aceleración Mecanismo para Compactar Latas-1esteban ricardo calderon rosalesAún no hay calificaciones
- Piloto EAESforma 9Documento9 páginasPiloto EAESforma 9Byron Rolito PerugachiAún no hay calificaciones
- Cl03 Cinematica de MecanismosDocumento59 páginasCl03 Cinematica de MecanismosluisulloaimAún no hay calificaciones
- Taller Coriolis PDFDocumento12 páginasTaller Coriolis PDFJosé Gregorio Villarreal OrtegaAún no hay calificaciones
- Cinematica Plana de Un Cuerpo RigidoDocumento57 páginasCinematica Plana de Un Cuerpo RigidoMijhael Anatholi Romero Mamani100% (1)
- Guía de Laboratorio 6 - MecanismosDocumento7 páginasGuía de Laboratorio 6 - MecanismosAdrian MejiasAún no hay calificaciones
- Movimiento Circular Mcu McuvDocumento6 páginasMovimiento Circular Mcu McuvMarco Antonio Villar HerreraAún no hay calificaciones
- Robótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsDe EverandRobótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsAún no hay calificaciones
- Detección de colisiones: Comprensión de las intersecciones visuales en visión por computadoraDe EverandDetección de colisiones: Comprensión de las intersecciones visuales en visión por computadoraAún no hay calificaciones
- Flujo óptico: Explorando patrones visuales dinámicos en visión por computadoraDe EverandFlujo óptico: Explorando patrones visuales dinámicos en visión por computadoraAún no hay calificaciones
- Unidades de MasaDocumento6 páginasUnidades de MasaDavid Castiblanco CantorAún no hay calificaciones
- RoscadoDocumento52 páginasRoscadojencopaAún no hay calificaciones
- Ejercicios Factores Conversion-Hoja 3Documento2 páginasEjercicios Factores Conversion-Hoja 3api-3075745170% (2)
- m25 2011 Dibujo Tecnico PDFDocumento7 páginasm25 2011 Dibujo Tecnico PDFjencopaAún no hay calificaciones
- TEMA 3. Corriente Continua PDFDocumento19 páginasTEMA 3. Corriente Continua PDFjencopaAún no hay calificaciones
- Examen de Física-VectoresDocumento1 páginaExamen de Física-VectoresJavier HernánAún no hay calificaciones
- Mecánica de Cuerpos RígidosDocumento10 páginasMecánica de Cuerpos RígidosManuel GutierrezAún no hay calificaciones
- Introducción Estatica de EstructurasDocumento10 páginasIntroducción Estatica de EstructurasFranco FloresAún no hay calificaciones
- Pelec 1Documento0 páginasPelec 1jesusdavisbAún no hay calificaciones
- Bi 1Documento201 páginasBi 1VolAún no hay calificaciones
- Guía de Lab Virtual Movimiento ParabólicoDocumento25 páginasGuía de Lab Virtual Movimiento ParabólicoAlisson NicoleAún no hay calificaciones
- Tema 7 - Espacios Vectoriales 1Documento9 páginasTema 7 - Espacios Vectoriales 1Pablo Rommel RcpAún no hay calificaciones
- 4.6 - Base Ortonormal y Proceso Gram-Schmidt Equipo 6Documento27 páginas4.6 - Base Ortonormal y Proceso Gram-Schmidt Equipo 6Marco JordánAún no hay calificaciones
- Evaluación Diagnóstica FisicaDocumento41 páginasEvaluación Diagnóstica FisicaJesus CantuAún no hay calificaciones
- ElectomagnetismoDocumento47 páginasElectomagnetismoBryanscratchdjAún no hay calificaciones
- Deber 1 Repaso de VectoresDocumento2 páginasDeber 1 Repaso de VectoresJavier StalinAún no hay calificaciones
- MANUAL - Intelect Mobile 2 ComboDocumento1 páginaMANUAL - Intelect Mobile 2 CombowaldirAún no hay calificaciones
- 100000A02Q Material S13.s1Documento19 páginas100000A02Q Material S13.s1Jymy Jim HjAún no hay calificaciones
- Práctica Capitulo 2Documento3 páginasPráctica Capitulo 2Belen SoteloAún no hay calificaciones
- Lab Oratorio 2 Campo ElectricoDocumento8 páginasLab Oratorio 2 Campo ElectricoSebastian HernandezAún no hay calificaciones
- Schwarz Inequality EsDocumento2 páginasSchwarz Inequality EsSebastian SandobalAún no hay calificaciones
- EA05 2020-21 Grupo05 ActividadDocumento5 páginasEA05 2020-21 Grupo05 ActividadVictor VeselinovAún no hay calificaciones
- Guía de Estudio Tlalpan 2012Documento386 páginasGuía de Estudio Tlalpan 2012Guadalupe MelchorAún no hay calificaciones
- Practica 1 de Problemas de AplicaciónDocumento7 páginasPractica 1 de Problemas de AplicaciónRefugio Rodriguez Miguel AngelAún no hay calificaciones
- Ejercicios Primera Unidad de FísicaDocumento11 páginasEjercicios Primera Unidad de FísicaManuel Antonio Vásquez ConchaAún no hay calificaciones
- Círculo de Mohr para Esfuerzos en 2D: 1. Se Dibujan Los Ejes CoordenadosDocumento21 páginasCírculo de Mohr para Esfuerzos en 2D: 1. Se Dibujan Los Ejes CoordenadosCristian LunaAún no hay calificaciones
- Taller de Práctica Semana 01Documento4 páginasTaller de Práctica Semana 01Jordy Aquino LopezAún no hay calificaciones
- ProgramacionDidactica III PAC 2022 Calculo III MM 408Documento20 páginasProgramacionDidactica III PAC 2022 Calculo III MM 408kelin61Aún no hay calificaciones
- BFI01 Física IDocumento4 páginasBFI01 Física IJulio ChaucaAún no hay calificaciones