También podría gustarte
- Sistemas Neumaticos e HidraulicosDocumento3 páginasSistemas Neumaticos e HidraulicosdespecterAún no hay calificaciones
- Comportamiento RLC, RC Y RLDocumento7 páginasComportamiento RLC, RC Y RLFabian BallenAún no hay calificaciones
- Instrumentacion VirtualDocumento120 páginasInstrumentacion Virtualzamora1111Aún no hay calificaciones
- NOMENCLATURADocumento6 páginasNOMENCLATURAAngel Arturo AlferezAún no hay calificaciones
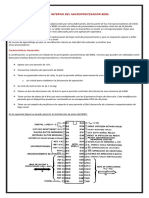
- Microprocesador 8085Documento7 páginasMicroprocesador 8085Percy VillegasAún no hay calificaciones
- Bombas CentrigugasDocumento60 páginasBombas CentrigugasWalter GarciaAún no hay calificaciones
- Seccion III Actuadores y ValvulasDocumento30 páginasSeccion III Actuadores y ValvulasantonioAún no hay calificaciones
- TanqueDocumento3 páginasTanqueJohn Rixon YupariAún no hay calificaciones
- Historia de Proteccion CivilDocumento22 páginasHistoria de Proteccion CivilCARLOSAún no hay calificaciones
- Practica 3. Determinacion de Perdidas de EnergiaDocumento4 páginasPractica 3. Determinacion de Perdidas de EnergiaCiro HerreraAún no hay calificaciones
- Retorno de La Inversión - TransformadoresDocumento3 páginasRetorno de La Inversión - Transformadoresbetty_ortiz10Aún no hay calificaciones
- Termo 4Documento26 páginasTermo 4AldoCabreraFernandez100% (1)
- Rep p2Documento11 páginasRep p2ivan zapata100% (1)
- Unidad 3 InstrumentacionDocumento14 páginasUnidad 3 InstrumentacionMichel BielmaAún no hay calificaciones
- Unidad VDocumento40 páginasUnidad VcaresanAún no hay calificaciones
- Universidad Nacional Autónoma de Mexic1Documento8 páginasUniversidad Nacional Autónoma de Mexic1Luis Enrique Gutiérrez100% (1)
- 4Documento14 páginas4Rosvit De la CruzAún no hay calificaciones
- Termodinamica Unidad 1 Fundamento Teorico PDFDocumento51 páginasTermodinamica Unidad 1 Fundamento Teorico PDFLee-hoo Transe BeeathAún no hay calificaciones
- Planta TermoelectricaDocumento14 páginasPlanta TermoelectricaRodrigoManzanoSandovalAún no hay calificaciones
- Control Planta de TemperaturaDocumento20 páginasControl Planta de TemperaturaAlexis GongoraAún no hay calificaciones
- Sistema Agua Dulce - RemolcadorDocumento44 páginasSistema Agua Dulce - RemolcadorAlexander RomeroAún no hay calificaciones
- Programación Extrema - Metodología AgilDocumento6 páginasProgramación Extrema - Metodología AgilAndres Beifong100% (1)
- Perdidas de Agua de Una Bomba Centrifuga EXPONERDocumento12 páginasPerdidas de Agua de Una Bomba Centrifuga EXPONERJuan Luis Valencia PrietoAún no hay calificaciones
- TorsiónDocumento6 páginasTorsiónDeportes Vida Y Salud.Aún no hay calificaciones
- Actividad-3-Interfases-Graficas Fime ImtcDocumento7 páginasActividad-3-Interfases-Graficas Fime ImtcJavier CantúAún no hay calificaciones
- Motores IiiDocumento17 páginasMotores IiiricardoAún no hay calificaciones
- Ejercicios de FisicaDocumento4 páginasEjercicios de FisicaEdwin VargasAún no hay calificaciones
- Transformador BàsicoDocumento4 páginasTransformador BàsicoSonny SalazarAún no hay calificaciones
- Dixell España XW20L-XW20V SP r1 0 15 12 2004Documento5 páginasDixell España XW20L-XW20V SP r1 0 15 12 2004David Lemos SanchezAún no hay calificaciones
- Caso Reparación VehículoDocumento2 páginasCaso Reparación Vehículojose blancoAún no hay calificaciones
- Análisis Dinámico Del Solido Rígido - Fuerzas y Aceleraciones - VibracionesDocumento23 páginasAnálisis Dinámico Del Solido Rígido - Fuerzas y Aceleraciones - VibracionesLino Alor100% (1)
- Seguidor de VoltajeDocumento21 páginasSeguidor de VoltajeDavid IlvisAún no hay calificaciones
- Desierto de SonoraDocumento31 páginasDesierto de Sonorapablo100% (1)
- Bañon Felix Liz Controlador Banco PsicrometriaDocumento65 páginasBañon Felix Liz Controlador Banco PsicrometriaGuzz JD100% (1)
- Clasificación de Los FluidosDocumento10 páginasClasificación de Los FluidosSergio P. Condori PacaraAún no hay calificaciones
- Modelado de Llenado de EstanqueDocumento6 páginasModelado de Llenado de EstanqueMichelle Andrea Cajas RivasAún no hay calificaciones
- Controladores Lógicos Programables PDFDocumento11 páginasControladores Lógicos Programables PDFarthurpumpAún no hay calificaciones
- Ciclos RealesDocumento8 páginasCiclos RealesUsoor HernandezAún no hay calificaciones
- Análisis de Masa y Energía de Volúmenes de Control TermodinamicaDocumento7 páginasAnálisis de Masa y Energía de Volúmenes de Control TermodinamicajoseAún no hay calificaciones
- Sistemas Operativos y Lenguajes de ProgramaciónDocumento15 páginasSistemas Operativos y Lenguajes de Programacióncamm_1000780650% (2)
- Uriel ControlesDocumento3 páginasUriel ControlesEmmanuel Alvarez0% (1)
- Arranque Directo Con Inversion de GiroDocumento8 páginasArranque Directo Con Inversion de GiroMiguel ZPAún no hay calificaciones
- 1.6 Conceptos Basicos de Las Smart GridDocumento8 páginas1.6 Conceptos Basicos de Las Smart GridDiego Vinueza AAún no hay calificaciones
- Proyecto 2 Acumuladores de EnvasesDocumento3 páginasProyecto 2 Acumuladores de EnvasesJose Felix Jordan DazaAún no hay calificaciones
- Equipos Auxiliares VálvulasDocumento13 páginasEquipos Auxiliares VálvulasalfredoAún no hay calificaciones
- Dinamica de Maquinaria-Investigacion Impulso y Momento en Los Cuerpos RigidosDocumento30 páginasDinamica de Maquinaria-Investigacion Impulso y Momento en Los Cuerpos RigidosMoises Orozco CruzAún no hay calificaciones
- Laboratorio 2 - Cálculo de Presión, y Uso de Manometro U PDFDocumento5 páginasLaboratorio 2 - Cálculo de Presión, y Uso de Manometro U PDFErick TejadaAún no hay calificaciones
- Fundamentos de Sistema Digital Unidad 1Documento21 páginasFundamentos de Sistema Digital Unidad 1Jesus Francisco Diaz AlvaradoAún no hay calificaciones
- Acumulador de SuccionDocumento12 páginasAcumulador de SuccionAlexander VelezAún no hay calificaciones
- Características Del Seguidor Oscilante de Cara Plana.Documento3 páginasCaracterísticas Del Seguidor Oscilante de Cara Plana.JavierHernandezAún no hay calificaciones
- Entrada y Salida de Dos PistonesDocumento11 páginasEntrada y Salida de Dos PistonesKevin BastidaAún no hay calificaciones
- 1 TermodinamicaDocumento61 páginas1 TermodinamicaGabrielRobba100% (1)
- T Espel 0412Documento122 páginasT Espel 0412anviozzyAún no hay calificaciones
- Banco de Datos de Mantenimiento Parte ADocumento17 páginasBanco de Datos de Mantenimiento Parte APietro Silvestri Jiron100% (1)
- Fuente Step DownDocumento7 páginasFuente Step DownGustavo FonollosaAún no hay calificaciones
- Instalación Porta Filtro DCR PDFDocumento4 páginasInstalación Porta Filtro DCR PDFDe La Rosa SantiagoAún no hay calificaciones
- Motor StirlingDocumento23 páginasMotor StirlingRamiro Jesus Aguilar HuallpaAún no hay calificaciones
- Máquina HidráulicaDocumento20 páginasMáquina HidráulicaSinhue RamirezAún no hay calificaciones
- Equipo 6 Cause Segmentado de Ejecucion PipelineDocumento58 páginasEquipo 6 Cause Segmentado de Ejecucion PipelineAlanAún no hay calificaciones
- Segmentación 2019Documento9 páginasSegmentación 2019Xiomi GutierrezAún no hay calificaciones