También podría gustarte
- Pasion Por Mexico - Engranes - 09-11-16Documento62 páginasPasion Por Mexico - Engranes - 09-11-16Victor Paniagua MauleónAún no hay calificaciones
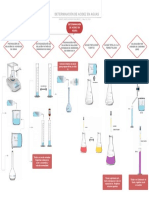
- Determinación de acidez en aguasDocumento1 páginaDeterminación de acidez en aguasAngie Daniela BravoAún no hay calificaciones
- EcologíaDocumento149 páginasEcologíapsicoedup100% (1)
- Practica 5 FriturasDocumento31 páginasPractica 5 FriturasMarialuisa CBAún no hay calificaciones
- Cálculo de corrientes y potencias de cortocircuito en un sistema eléctricoDocumento7 páginasCálculo de corrientes y potencias de cortocircuito en un sistema eléctricoGoakofAún no hay calificaciones
- Mantenimiento Electrico A Sistemas de Tierra y Aspectos de SeguridadDocumento14 páginasMantenimiento Electrico A Sistemas de Tierra y Aspectos de SeguridadRamon TorresAún no hay calificaciones
- Libro de Subestaciones ElectricasDocumento107 páginasLibro de Subestaciones Electricasjair ruiz ortiz100% (1)
- Trabajo VirtualDocumento9 páginasTrabajo VirtualparalyxerAún no hay calificaciones
- Problemas Geotecnia y Cimientos 6 33Documento28 páginasProblemas Geotecnia y Cimientos 6 33Madelaine Tayupanda100% (1)
- Relevadores de Protección de Sobre CorrienteDocumento31 páginasRelevadores de Protección de Sobre CorrientejoseAún no hay calificaciones
- Proyecto - Subestaciones ElectricasDocumento75 páginasProyecto - Subestaciones ElectricasJacke AngelesAún no hay calificaciones
- Perforadora ManualDocumento183 páginasPerforadora ManualJose Antonio VillalobosAún no hay calificaciones
- 2 FORMATOSnPREVENTIVOnSANTIAGOnJOSE - 3861031ced76c90Documento23 páginas2 FORMATOSnPREVENTIVOnSANTIAGOnJOSE - 3861031ced76c90Adrian May100% (2)
- Centrales termoeléctricas o plantas de vaporDocumento40 páginasCentrales termoeléctricas o plantas de vaporAlan SantosAún no hay calificaciones
- Muro de ContenciónDocumento85 páginasMuro de ContenciónMax Quintero TincoAún no hay calificaciones
- Unidad 4 Instalaciones Electricas IndustrialesDocumento62 páginasUnidad 4 Instalaciones Electricas IndustrialesVicente Lopez Posada100% (1)
- Taller 1 - Módulo 7 Auditoría de Seguridad y Salud OcupacionalDocumento3 páginasTaller 1 - Módulo 7 Auditoría de Seguridad y Salud OcupacionalAndréVelazco100% (6)
- Tarea de Interruptores de PotenciaDocumento12 páginasTarea de Interruptores de PotenciaFernando Gutierrez Zelaya100% (1)
- Clasificación Nema de Motores de InducciónDocumento17 páginasClasificación Nema de Motores de InducciónLuis Samuel Cupul SanchezAún no hay calificaciones
- Supervisión y fiscalización en minería: taller práctico No. 01Documento1 páginaSupervisión y fiscalización en minería: taller práctico No. 01AndréVelazco100% (1)
- Itsoeh 2.8 BuenoDocumento24 páginasItsoeh 2.8 BuenoKey Ashari Camargo López100% (1)
- Esta Bili DadDocumento89 páginasEsta Bili DadMartinAún no hay calificaciones
- Regla Trapezoidal Aplicada A La Estabilidad TransitoriaDocumento24 páginasRegla Trapezoidal Aplicada A La Estabilidad TransitoriaStif Flores G.Aún no hay calificaciones
- Unidad 4 Variadores de VelocidadDocumento17 páginasUnidad 4 Variadores de VelocidadJoseAún no hay calificaciones
- 8a P y Mantto Electrico 3.5Documento27 páginas8a P y Mantto Electrico 3.5Wilbert J. TorresAún no hay calificaciones
- Tarea Unidad 6. - Fuentes Alternas y No Convencionales.Documento15 páginasTarea Unidad 6. - Fuentes Alternas y No Convencionales.Enrique VegaAún no hay calificaciones
- 2da Tarea - Cruz Albeto L.NDocumento34 páginas2da Tarea - Cruz Albeto L.NMaria Ysabel Lopez SanchezAún no hay calificaciones
- Ruba Protsep B t1 Act 2Documento9 páginasRuba Protsep B t1 Act 2Alexander RuizAún no hay calificaciones
- Control EstáticoDocumento48 páginasControl EstáticoOmarManjarrez0% (1)
- Cargas IndustrialesDocumento13 páginasCargas Industrialesjose neira100% (1)
- Actividades Del Mantenimiento EléctricoDocumento23 páginasActividades Del Mantenimiento EléctricoDANIEL ESTRADA MARTINEZAún no hay calificaciones
- Lineas de Transmision y Cables SubterraneosDocumento7 páginasLineas de Transmision y Cables SubterraneosMariano Falcon Fernandez100% (1)
- Control de motores reversibles mediante arrancadoresDocumento9 páginasControl de motores reversibles mediante arrancadoresRAFITAMAXAún no hay calificaciones
- Calculo de Red A TierraDocumento9 páginasCalculo de Red A TierraMiguel Angel BolivarAún no hay calificaciones
- Portafolio PruebasDocumento37 páginasPortafolio PruebasIrene SCAún no hay calificaciones
- Redes Subterraneas NormasDocumento25 páginasRedes Subterraneas Normasyelitza1xAún no hay calificaciones
- Transformador OSAKA - IDAXDocumento2 páginasTransformador OSAKA - IDAXChristianAún no hay calificaciones
- Arrancador monofásico SCRDocumento5 páginasArrancador monofásico SCRRafael Ramirez100% (1)
- Tema 2.4 BurdenDocumento8 páginasTema 2.4 BurdenAlberto Flores AvilesAún no hay calificaciones
- Tema1 5Documento6 páginasTema1 5Luis Angel Martinez LuisAún no hay calificaciones
- 1.5 ApartarrayosDocumento18 páginas1.5 ApartarrayosAntonio De Jesús NavaAún no hay calificaciones
- Arranque y Control de Velocidad Del Motor de Inducción.Documento30 páginasArranque y Control de Velocidad Del Motor de Inducción.ADONAI GUZMAN ROSASAún no hay calificaciones
- Reporte de Practica No. 4 - Arranque A Tensión PlenaDocumento5 páginasReporte de Practica No. 4 - Arranque A Tensión PlenaErnesto Sotelo GarciaAún no hay calificaciones
- Curva de Distribución LuminosaDocumento2 páginasCurva de Distribución LuminosaAdan Camacho100% (2)
- 1.6 Sleccion de Motores para BombasDocumento4 páginas1.6 Sleccion de Motores para BombasMartin' Dejesus Arias ParadaAún no hay calificaciones
- Cálculo flujos potencia estabilidad SEPDocumento57 páginasCálculo flujos potencia estabilidad SEPKathya RoldanAún no hay calificaciones
- Pruebas eléctricas en transformadores: polaridad, aislamiento y tierrasDocumento32 páginasPruebas eléctricas en transformadores: polaridad, aislamiento y tierrasIsmael Hernandez ZamoraAún no hay calificaciones
- Control dispositivos eléctricos máquinasDocumento41 páginasControl dispositivos eléctricos máquinasDavid Addy Sánchez PerezAún no hay calificaciones
- Cuevas Tarea 2Documento16 páginasCuevas Tarea 2judithruizcabreraAún no hay calificaciones
- Clasificación de subestacionesDocumento4 páginasClasificación de subestacionesSerrano GaliAún no hay calificaciones
- TC y TPDocumento17 páginasTC y TParmisterioAún no hay calificaciones
- Relé de Sobre Corriente SPAJ 131CDocumento3 páginasRelé de Sobre Corriente SPAJ 131CNoel PedrazaAún no hay calificaciones
- Metodos de Puesta A TierraDocumento6 páginasMetodos de Puesta A TierraDarioo Javier0% (1)
- Subestaciones Electricas Con El Protocolo de Comunicaciones Iec61850Documento16 páginasSubestaciones Electricas Con El Protocolo de Comunicaciones Iec61850yaneiroAún no hay calificaciones
- Malla A Tierra IntroducciónDocumento14 páginasMalla A Tierra IntroducciónMarco Navarro100% (1)
- Metodo de Benh EchemburgDocumento6 páginasMetodo de Benh EchemburgPööł PčAún no hay calificaciones
- 1.2 Características Fundamentales de La Protección Con RelevadoresDocumento3 páginas1.2 Características Fundamentales de La Protección Con RelevadoresEdyn R VillanuevaAún no hay calificaciones
- Unidad 5 Motores de Inducción Monofásicos y Máquinas EspecialesDocumento18 páginasUnidad 5 Motores de Inducción Monofásicos y Máquinas Especialestony0% (1)
- Aisladores Aplicados A Subestaciones ResumenDocumento8 páginasAisladores Aplicados A Subestaciones Resumenmalc19890% (1)
- Arranque y Control de Velocidad de Los Motores de Inducción.Documento55 páginasArranque y Control de Velocidad de Los Motores de Inducción.Alejandro Cortes DominguezAún no hay calificaciones
- Conexión de máquinas sincrónas en paraleloDocumento21 páginasConexión de máquinas sincrónas en paraleloManuel Spiegel100% (1)
- Esquemas de protección y control para parques eólicosDocumento73 páginasEsquemas de protección y control para parques eólicosChristianMerchanAún no hay calificaciones
- 2 - Clase 1 A 3 - Subestaciones Con Trabajos 1 A 3Documento16 páginas2 - Clase 1 A 3 - Subestaciones Con Trabajos 1 A 3Richard navarreteAún no hay calificaciones
- Generador Síncrono en VACÍODocumento10 páginasGenerador Síncrono en VACÍOAnthony GoAún no hay calificaciones
- 33 - Relevadores de Porcentaje DiferencialDocumento9 páginas33 - Relevadores de Porcentaje Diferencialhakashu100% (2)
- Cables MT subterráneosDocumento5 páginasCables MT subterráneosJuanMa GonzalezAún no hay calificaciones
- Controles Eléctricos 6Documento22 páginasControles Eléctricos 6yooy yoAún no hay calificaciones
- Selección de Interruptor y FusibleDocumento25 páginasSelección de Interruptor y Fusiblecarlos sanchezAún no hay calificaciones
- MITIGACIÓN DE SAGS Y SWELLS MEDIANTE MÉTODOS DE ATENUACIÓNDocumento4 páginasMITIGACIÓN DE SAGS Y SWELLS MEDIANTE MÉTODOS DE ATENUACIÓNCésar HdzAún no hay calificaciones
- Ecuaciones Diferenciales Ordinarias ListoDocumento11 páginasEcuaciones Diferenciales Ordinarias ListoBarry Daniel Duran RojasAún no hay calificaciones
- Acondicionamiento de SeñalesDocumento9 páginasAcondicionamiento de SeñalesAllison ElianaAún no hay calificaciones
- Trabajo de Investigación - Módulo 6Documento8 páginasTrabajo de Investigación - Módulo 6AndréVelazco100% (2)
- Taller 2 - Módulo 7Documento6 páginasTaller 2 - Módulo 7AndréVelazco100% (3)
- Taller práctico fiscalización mineríaDocumento2 páginasTaller práctico fiscalización mineríaAndréVelazco100% (1)
- Factor de Distribución GGDFDocumento7 páginasFactor de Distribución GGDFAndréVelazco0% (1)
- Control Remoto de Velocidad y Sentido de Giro de Un MotorDocumento6 páginasControl Remoto de Velocidad y Sentido de Giro de Un MotorAndréVelazcoAún no hay calificaciones
- Modelamiento de Maquinas SincronasDocumento45 páginasModelamiento de Maquinas SincronasAndréVelazcoAún no hay calificaciones
- Solicitudes LigthmanDocumento5 páginasSolicitudes LigthmanAndréVelazcoAún no hay calificaciones
- Secuencia de Elementos de Un SepDocumento4 páginasSecuencia de Elementos de Un SepAndréVelazcoAún no hay calificaciones
- Transistor IgbtDocumento23 páginasTransistor IgbtAndréVelazcoAún no hay calificaciones
- Calentador - TurbomáquinasDocumento6 páginasCalentador - TurbomáquinasAndréVelazcoAún no hay calificaciones
- Factore de ProducciónDocumento19 páginasFactore de ProducciónDelia Guillen QuispeAún no hay calificaciones
- Codigo AvfDocumento1 páginaCodigo AvfAndréVelazcoAún no hay calificaciones
- Caso Tesis LedDocumento77 páginasCaso Tesis LedPierre RojasAún no hay calificaciones
- Maquinas Electricas IDocumento24 páginasMaquinas Electricas IAndréVelazcoAún no hay calificaciones
- Guía de Práctica-GéneroDocumento3 páginasGuía de Práctica-GéneroAndréVelazcoAún no hay calificaciones
- Capítulo 11-Anclaje y Retenidas Ver 3 0Documento12 páginasCapítulo 11-Anclaje y Retenidas Ver 3 0Giancarlo Zeballos TerrazasAún no hay calificaciones
- Válvula de CompuertaDocumento18 páginasVálvula de CompuertaRonal Quispe HuamanAún no hay calificaciones
- Cu-Man COMO ENSEÑAR CLARO OSCURODocumento80 páginasCu-Man COMO ENSEÑAR CLARO OSCUROSergio Dellagnolo100% (2)
- EMO-05 M1AA2L1 MovimientoDocumento7 páginasEMO-05 M1AA2L1 MovimientoPaty TapiaAún no hay calificaciones
- Tarea 1 Instrumentacion y ControlDocumento41 páginasTarea 1 Instrumentacion y ControlAlejandro OlivaresAún no hay calificaciones
- Sistema de coordenadas polares y tipos de gráficosDocumento13 páginasSistema de coordenadas polares y tipos de gráficosvaleriaAún no hay calificaciones
- Practico 1Documento19 páginasPractico 1Nelson Antelo100% (1)
- Anexo I Matematicas ActividadesDocumento32 páginasAnexo I Matematicas ActividadesJulian Estiven Ruiz CastañedaAún no hay calificaciones
- Ejercicios Prepa 1Documento5 páginasEjercicios Prepa 1Javier GuerreroAún no hay calificaciones
- Diseño de Pavimento Flexible para Calle de Loja, EcuadorDocumento8 páginasDiseño de Pavimento Flexible para Calle de Loja, EcuadorAngel RosilloAún no hay calificaciones
- D 2 Afc 4Documento2 páginasD 2 Afc 4deivy SanchezAún no hay calificaciones
- 21 Mod4 ExjulDocumento2 páginas21 Mod4 ExjulAlbaAún no hay calificaciones
- Etapas Del Desarrollo de La QuimicaDocumento3 páginasEtapas Del Desarrollo de La QuimicaJervin GómezAún no hay calificaciones
- Alimentacion CCTVDocumento9 páginasAlimentacion CCTVricardoAún no hay calificaciones
- Lab N°3 Energía Específica en Canales AbiertosDocumento6 páginasLab N°3 Energía Específica en Canales AbiertosKevin Quillash GuerreroAún no hay calificaciones
- Gráficas TridimensionalesDocumento3 páginasGráficas TridimensionalesGiancarlos Anthony Espíritu BravoAún no hay calificaciones
- Informe Físico-Química 05 Punto CrioscópicoDocumento13 páginasInforme Físico-Química 05 Punto CrioscópicoMarco Fabio Rodriguez ArayaAún no hay calificaciones
- Columna EstratigraficaDocumento24 páginasColumna EstratigraficaFranz Oscar AicaSotoAún no hay calificaciones
- EjercicioDocumento5 páginasEjercicioTITOAún no hay calificaciones
- Proyecto FisicaDocumento8 páginasProyecto FisicaAlvaro QuispeAún no hay calificaciones
- Tipos de ConectoresDocumento12 páginasTipos de ConectoreslordpatricioxAún no hay calificaciones
- Ciclo Sabathé 2018Documento14 páginasCiclo Sabathé 2018eduardoAún no hay calificaciones