También podría gustarte
- DirecciónDocumento86 páginasDirecciónEdu DV100% (1)
- Guia de Cajas de Direccion y CremallerasDocumento11 páginasGuia de Cajas de Direccion y CremallerasS'Francisco Gutierrez MartinezAún no hay calificaciones
- Sistema de DireccionDocumento13 páginasSistema de Direccionalex mamaniAún no hay calificaciones
- Sistema de DirecciónDocumento15 páginasSistema de DirecciónGabriela Alcocer GuzmánAún no hay calificaciones
- El Conjunto de Mecanismos Que Componen El Sistema de Dirección Tienen La Misión de Orientar Las Ruedas Delanteras para Que El Vehículo Tome La Trayectoria Deseada Por El ConductorDocumento12 páginasEl Conjunto de Mecanismos Que Componen El Sistema de Dirección Tienen La Misión de Orientar Las Ruedas Delanteras para Que El Vehículo Tome La Trayectoria Deseada Por El Conductoredwin0% (1)
- Sistema de DireccionDocumento20 páginasSistema de DireccionYuri Villanueva RojasAún no hay calificaciones
- Sistema de DirecciónDocumento18 páginasSistema de DirecciónRuddy Alejandro Chamaca JiménezAún no hay calificaciones
- Sistema de DireccionDocumento24 páginasSistema de DireccionRichard OcarizAún no hay calificaciones
- Trabajos de GallegosDocumento24 páginasTrabajos de GallegosConalep Plantel Fresnillo100% (2)
- Sistema de Direccion MecanicaDocumento13 páginasSistema de Direccion Mecanicagrancapo67Aún no hay calificaciones
- Curso Sistemas de Direccion en El AutomovilDocumento82 páginasCurso Sistemas de Direccion en El AutomovilHernan Gabriel Jorge100% (1)
- Sistema de DirecciónDocumento9 páginasSistema de DirecciónLuigy TzulAún no hay calificaciones
- Sistemas de Direccion Teoria Descripcion de Componentes Al Detalle Incluidos Angulos de AlineacionDocumento85 páginasSistemas de Direccion Teoria Descripcion de Componentes Al Detalle Incluidos Angulos de AlineacionDIONYBLINKAún no hay calificaciones
- Word de Cajas de DireccionDocumento27 páginasWord de Cajas de DireccionDiego Pérez CofréAún no hay calificaciones
- Direccion GokartDocumento14 páginasDireccion GokartHernan CAún no hay calificaciones
- Sistema de Direccion 3dDocumento18 páginasSistema de Direccion 3dMiguel Angel MoránAún no hay calificaciones
- El Sistema de DirecciónDocumento22 páginasEl Sistema de DirecciónLuis QuispeAún no hay calificaciones
- Sistema de DirecciónDocumento13 páginasSistema de Direcciónjaime riquelmeAún no hay calificaciones
- DirecciónDocumento16 páginasDirecciónJohnAún no hay calificaciones
- Manual Sistema Direccion Automoviles Esquema Componentes Arquitectura MecanismoDocumento20 páginasManual Sistema Direccion Automoviles Esquema Componentes Arquitectura MecanismopedroAún no hay calificaciones
- Sistema de DireccionDocumento13 páginasSistema de DireccionRobert Ojeda100% (1)
- Sistemas de Dirección - 1Documento33 páginasSistemas de Dirección - 1antonioAún no hay calificaciones
- ZZZZZZZZZZZZZZZZDocumento11 páginasZZZZZZZZZZZZZZZZJuan Carlos RedmayneAún no hay calificaciones
- 2ws General y 4ws GeneralDocumento19 páginas2ws General y 4ws GeneralJassia Cortés100% (1)
- Brazo de PitmanDocumento10 páginasBrazo de PitmanJorge Abraham Yepez ArzubialdeAún no hay calificaciones
- Cuestionario 1. - La DireccionDocumento8 páginasCuestionario 1. - La DireccionMauricio UtrillaAún no hay calificaciones
- PDF Sistema de DireccionDocumento24 páginasPDF Sistema de DireccionMarcos Saenz QuerevaluAún no hay calificaciones
- ACKERMANDocumento12 páginasACKERMANpacxisAún no hay calificaciones
- Direccion 1Documento76 páginasDireccion 1emilioC5Aún no hay calificaciones
- Función Del Sistema de DirecciónDocumento11 páginasFunción Del Sistema de DirecciónJesus50% (2)
- Piñon y CremalleraDocumento15 páginasPiñon y CremalleraMarcela Lopez Barraza0% (1)
- Direccion AutomovilDocumento16 páginasDireccion AutomovilIsi Nieto Lopez100% (1)
- 1ºel Fluidos T8Documento23 páginas1ºel Fluidos T8José DíazAún no hay calificaciones
- Mecánica Automotriz - Power Unidad 4Documento72 páginasMecánica Automotriz - Power Unidad 4Tony VIDALESAún no hay calificaciones
- Clase 2 DireccionDocumento52 páginasClase 2 DireccionJimmy Joel Maldonado LabandaAún no hay calificaciones
- DireccionDocumento34 páginasDireccionRamos Paredes GonzaloAún no hay calificaciones
- Sistema de DireccionDocumento3 páginasSistema de DireccionJossué Moya VegaAún no hay calificaciones
- Taller Del Sistema de DireccionDocumento27 páginasTaller Del Sistema de Direcciondarkwing valenciaAún no hay calificaciones
- Partes Principales de Un AutomovilDocumento21 páginasPartes Principales de Un AutomovilFrederick FabrgasAún no hay calificaciones
- Curso Sistema Direccion Caracteristicas Arquitectura Historia Mecanismos TiposDocumento28 páginasCurso Sistema Direccion Caracteristicas Arquitectura Historia Mecanismos TipospedroAún no hay calificaciones
- Direccion1Documento11 páginasDireccion1Segundo GarcesAún no hay calificaciones
- Informe de Sistema de DirecciónDocumento16 páginasInforme de Sistema de DirecciónLuis Torres Fernández83% (6)
- DOCUMENTO RECURSO 1 SabadoDocumento17 páginasDOCUMENTO RECURSO 1 SabadoNazim Nicolas Gallardo YañezAún no hay calificaciones
- Celador Conductor SAS Modulo 7 Tema 13Documento24 páginasCelador Conductor SAS Modulo 7 Tema 13Virtudes Sanchez OrozcoAún no hay calificaciones
- Sistema de Direccion Don RoloDocumento13 páginasSistema de Direccion Don RoloKEVIN0% (1)
- Como Trabaja La Dirección de Piñon y CremalleraDocumento13 páginasComo Trabaja La Dirección de Piñon y CremalleraMilton Orek100% (1)
- Guia de Diferencial Modificada 2021Documento11 páginasGuia de Diferencial Modificada 2021Sebastián RojasAún no hay calificaciones
- Dirección Asistida Neumática EnsayoDocumento11 páginasDirección Asistida Neumática EnsayoEduardo Ramirez100% (1)
- Sistemas Del Vehiculo, DireccionDocumento13 páginasSistemas Del Vehiculo, DireccionKevin GarciaAún no hay calificaciones
- T9 - Sistema de DirecciónDocumento64 páginasT9 - Sistema de DirecciónNigel JansenAún no hay calificaciones
- Direccion Mecanica Grupo 3Documento32 páginasDireccion Mecanica Grupo 3FRANK TORRES DIAZAún no hay calificaciones
- Sistema de DirecciónDocumento49 páginasSistema de DirecciónAlessandro VilchezAún no hay calificaciones
- Mecanismo DiferencialDocumento10 páginasMecanismo DiferencialJulio Cesar LlanqueAún no hay calificaciones
- Manual de Iniciación al Ciclismo de Montaña: Guía de Mtb, Elección de Bici, Mantenimiento, Reparación, Pinchazos, Técnicas de Manejo, Concejos, Seguridad, Diversión y Mucho Más.De EverandManual de Iniciación al Ciclismo de Montaña: Guía de Mtb, Elección de Bici, Mantenimiento, Reparación, Pinchazos, Técnicas de Manejo, Concejos, Seguridad, Diversión y Mucho Más.Aún no hay calificaciones
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 1 de 5 estrellas1/5 (2)
- MF1461_2 - Mantenimiento de primer nivel de vehículos de transporte por carreteraDe EverandMF1461_2 - Mantenimiento de primer nivel de vehículos de transporte por carreteraCalificación: 4 de 5 estrellas4/5 (2)
- UF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposDe EverandUF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposCalificación: 5 de 5 estrellas5/5 (1)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Desmontaje Del MotorDocumento23 páginasDesmontaje Del MotorVladimirAún no hay calificaciones
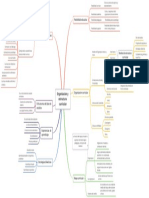
- Mapa Conceptual - Organizacion y Estructura CurricularDocumento1 páginaMapa Conceptual - Organizacion y Estructura CurricularVladimir100% (1)
- Cuestionario SDF100 PDFDocumento1 páginaCuestionario SDF100 PDFVladimirAún no hay calificaciones
- Enviando Cronograma Mas Ipsp Oruro-1Documento1 páginaEnviando Cronograma Mas Ipsp Oruro-1VladimirAún no hay calificaciones
- Cajetin Rimi2 PDFDocumento1 páginaCajetin Rimi2 PDFVladimirAún no hay calificaciones
- Enviando Ficha Tecnica 100359Documento1 páginaEnviando Ficha Tecnica 100359VladimirAún no hay calificaciones
- Enviando ORURODocumento203 páginasEnviando ORUROVladimir50% (2)
- Enviando FS5840325Documento2 páginasEnviando FS5840325VladimirAún no hay calificaciones
- Enviando Ficha Tecnica 100095Documento1 páginaEnviando Ficha Tecnica 100095VladimirAún no hay calificaciones
- Ficha Tecnica 100413Documento1 páginaFicha Tecnica 100413VladimirAún no hay calificaciones
- Enviando Ficha Tecnica 100197Documento1 páginaEnviando Ficha Tecnica 100197VladimirAún no hay calificaciones
- Enviando Ficha Tecnica 100117Documento1 páginaEnviando Ficha Tecnica 100117VladimirAún no hay calificaciones
- Enviando Ficha Tecnica 100121Documento1 páginaEnviando Ficha Tecnica 100121VladimirAún no hay calificaciones
- Enviando Ficha Tecnica 100419Documento1 páginaEnviando Ficha Tecnica 100419VladimirAún no hay calificaciones
- Enviando Ficha Tecnica 02131Documento1 páginaEnviando Ficha Tecnica 02131VladimirAún no hay calificaciones
- Enviando Ficha Tecnica 1Documento1 páginaEnviando Ficha Tecnica 1VladimirAún no hay calificaciones
- Enviando Comparador-de-Diametro-Interno-Serie-3089 PDFDocumento2 páginasEnviando Comparador-de-Diametro-Interno-Serie-3089 PDFVladimirAún no hay calificaciones
- Diagnostico Integral de ArchivoDocumento36 páginasDiagnostico Integral de ArchivoUNIDAD DE ARCHIVO CENTRAL UNAMADAún no hay calificaciones
- Catalogo Productos Ramses 2020 2021Documento62 páginasCatalogo Productos Ramses 2020 2021Jose BustilloAún no hay calificaciones
- Dragflow Catalogue SpanishDocumento28 páginasDragflow Catalogue SpanishJose Orrego AguilarAún no hay calificaciones
- Plantas Medicinales de Venezuela.Documento15 páginasPlantas Medicinales de Venezuela.AymericktyAún no hay calificaciones
- Procedimiento Trabajo Con AndamioDocumento21 páginasProcedimiento Trabajo Con AndamioMartin QuerevaluAún no hay calificaciones
- HerramientasDocumento44 páginasHerramientasPamela CarriónAún no hay calificaciones
- Seminario de Matemática AplicadaDocumento47 páginasSeminario de Matemática AplicadaBrenda Raquel Rafael VillalobosAún no hay calificaciones
- 2 Ficha Tecnica Frescasa FiberglassDocumento8 páginas2 Ficha Tecnica Frescasa Fiberglassno seAún no hay calificaciones
- Plan Unidad 4.1Documento2 páginasPlan Unidad 4.1johnAún no hay calificaciones
- Guía N°4 Biología 7°Documento12 páginasGuía N°4 Biología 7°Joseph suarez martinezAún no hay calificaciones
- Ejercicio 5 R & RDocumento2 páginasEjercicio 5 R & RJeny MaribelAún no hay calificaciones
- Presentación 4: Colón Ante La Reina" (1843), de Emanuel Gottlieb (1816-1868)Documento5 páginasPresentación 4: Colón Ante La Reina" (1843), de Emanuel Gottlieb (1816-1868)Lorena Valdes MoralesAún no hay calificaciones
- Enfermedades Infecciosas en El PerúDocumento9 páginasEnfermedades Infecciosas en El PerúStefannie Elizabeth Quispe LorenzoAún no hay calificaciones
- Mi Gato Es Un PillinDocumento45 páginasMi Gato Es Un PillinRAPHAEL LEONARDO JULCARIMA CEDILLOAún no hay calificaciones
- Tesis - Evaluación de Los Parámetros Productivos Bajo 5 de SincronizaciónDocumento83 páginasTesis - Evaluación de Los Parámetros Productivos Bajo 5 de Sincronizaciónsegundo dario rios astoAún no hay calificaciones
- Esta202202 TF1Documento3 páginasEsta202202 TF1Deivis CondezoAún no hay calificaciones
- TV SatelitalDocumento50 páginasTV SatelitalGustavo Vilchez100% (1)
- Fundamentos de Redes FTTHDocumento27 páginasFundamentos de Redes FTTHcarlos valenzuelaAún no hay calificaciones
- Tratamiento Ambiental I Del Río HuauraDocumento4 páginasTratamiento Ambiental I Del Río HuauraNiler Martin GuillenAún no hay calificaciones
- Objetivos y Formulación Del ProblemaDocumento2 páginasObjetivos y Formulación Del ProblemaCESPEDES MARQUEZ DIANA LUCIAAún no hay calificaciones
- La Historia de Una GaviotaDocumento14 páginasLa Historia de Una GaviotaLilianaCvitanicAún no hay calificaciones
- Proceso Cuidado de Enfermería - ValverdeDocumento33 páginasProceso Cuidado de Enfermería - ValverdeTHALIA ROXANA VALVERDE VALVERDEAún no hay calificaciones
- Sopa de LetrasDocumento2 páginasSopa de LetrasDesther Josue Perez QuevedoAún no hay calificaciones
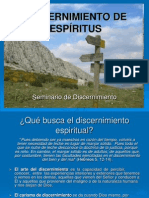
- Discernimiento de EspíritusDocumento19 páginasDiscernimiento de EspíritusESCUELARCC100% (7)
- Tipos de Mapaps Valles, Llanuras 6 GradoDocumento23 páginasTipos de Mapaps Valles, Llanuras 6 GradoIsmary EspinalAún no hay calificaciones
- Puente y PotenciometroDocumento3 páginasPuente y PotenciometroCarlos AndrésAún no hay calificaciones
- Deber 2 de Integrales IndefinidasDocumento7 páginasDeber 2 de Integrales IndefinidasChristian Borja TacuriAún no hay calificaciones
- Union Simple Acero InoxDocumento1 páginaUnion Simple Acero InoxJorge VillalbaAún no hay calificaciones
- Informe National Del Estado Del Ambiente - GEO Guatemala 2003 PDFDocumento233 páginasInforme National Del Estado Del Ambiente - GEO Guatemala 2003 PDFJose Alberto Gramajo HerreraAún no hay calificaciones
- Museo Mitre - Documentos de Su Archivo Colonial 1514-1810 - 1906Documento314 páginasMuseo Mitre - Documentos de Su Archivo Colonial 1514-1810 - 1906BibliotecarioAún no hay calificaciones