También podría gustarte
- Trastorno FetichistaDocumento15 páginasTrastorno FetichistaJuanDiegoTezénMaldonadoAún no hay calificaciones
- Apertura de Cerradura Electronica Mediante PicDocumento44 páginasApertura de Cerradura Electronica Mediante PicZavala Paéz Alejandro75% (4)
- Fuentes Conmutadas en TVDocumento5 páginasFuentes Conmutadas en TVcien.mandoAún no hay calificaciones
- Diseño Flotador DAFDocumento4 páginasDiseño Flotador DAFCarlos GamarraAún no hay calificaciones
- SISTEMA GLONASS y GALILEODocumento5 páginasSISTEMA GLONASS y GALILEOfrecia chura anahuaAún no hay calificaciones
- Sistemas GNSSDocumento14 páginasSistemas GNSSYannine Andrea Urizar SotoAún no hay calificaciones
- Toma de DecisionesDocumento10 páginasToma de DecisionesRonal Almestar0% (1)
- Técnicas de Muestreo GeologicoDocumento28 páginasTécnicas de Muestreo GeologicoJonathan Mendoza ChavezAún no hay calificaciones
- Sistema de Posicionamiento Global GPSDocumento4 páginasSistema de Posicionamiento Global GPSMilton GuamoAún no hay calificaciones
- GPSDocumento55 páginasGPSRoberto Lühr BarrosAún no hay calificaciones
- Sistemas GNSSDocumento17 páginasSistemas GNSSBoris Alfredo100% (1)
- Ficha Tecnica AceroDocumento3 páginasFicha Tecnica AceroAnonymous vuPzDUkSAún no hay calificaciones
- 4 - Topografía Subterránea TareaaaaaaaaDocumento55 páginas4 - Topografía Subterránea TareaaaaaaaaPercy taparaAún no hay calificaciones
- Que Es El WAASDocumento3 páginasQue Es El WAASssdevilssAún no hay calificaciones
- Procesos Constructivos en TúnelesDocumento3 páginasProcesos Constructivos en Túnelesfabian hernandezAún no hay calificaciones
- Fallas en Un Pavimento Rigido y FlexibleDocumento34 páginasFallas en Un Pavimento Rigido y FlexibleMarcos GarayAún no hay calificaciones
- Geotech FullPaper FabienRavetV2.1Documento11 páginasGeotech FullPaper FabienRavetV2.1Karen Tatiana Condori CazonAún no hay calificaciones
- Sistema GnssDocumento15 páginasSistema GnssDavid Bermudo HuamanAún no hay calificaciones
- Altura Del Geoide y ElipsoideDocumento8 páginasAltura Del Geoide y ElipsoideMarinellaMiteAún no hay calificaciones
- LEVANTAMIENTO CON WINCHA PRODUCTO FORMATIVO LDocumento25 páginasLEVANTAMIENTO CON WINCHA PRODUCTO FORMATIVO LKevin edu Acuña albrizzioAún no hay calificaciones
- TALLERDocumento23 páginasTALLERjonathan100% (1)
- Plan de Señalización PSTNDocumento16 páginasPlan de Señalización PSTNJuanDiegoTezénMaldonadoAún no hay calificaciones
- TPDADocumento12 páginasTPDAM Jos VèlizAún no hay calificaciones
- Tipos de SondeosDocumento13 páginasTipos de SondeosVictorCruelAún no hay calificaciones
- Examen 2 GeoestadisticaDocumento2 páginasExamen 2 GeoestadisticaGabriel HuesaAún no hay calificaciones
- Principio de PascalDocumento6 páginasPrincipio de Pascaljuan perezAún no hay calificaciones
- Informe de GranulometriaDocumento6 páginasInforme de GranulometriaCarlo Gaona LoyaAún no hay calificaciones
- 05 - Estimacion Local Leccion VulcanDocumento92 páginas05 - Estimacion Local Leccion VulcanYorky Edgardo Castillo50% (2)
- GNSS ExposicionDocumento10 páginasGNSS ExposicionHernan Guerra TrigoAún no hay calificaciones
- La Topografía y CartografiaDocumento44 páginasLa Topografía y CartografiaorlandoAún no hay calificaciones
- Introduccion GNSSDocumento8 páginasIntroduccion GNSSEmilio Jhonatan Fuertes ZárateAún no hay calificaciones
- Factores Que Afectan El Rendimiento de La ManoDocumento12 páginasFactores Que Afectan El Rendimiento de La ManoCesar Sneyder Pinilla PardoAún no hay calificaciones
- QGIS Vs ArcGISDocumento6 páginasQGIS Vs ArcGISodcardozoAún no hay calificaciones
- 58a Cornejo 2019 Marco Referencia PanamaDocumento16 páginas58a Cornejo 2019 Marco Referencia PanamaAndrea Rodriguez100% (1)
- Práctica N°6 - Análisis Granulométrico - Método MecánicoDocumento38 páginasPráctica N°6 - Análisis Granulométrico - Método MecánicoErickGonsalezAún no hay calificaciones
- Levantamiento Con Cinta y JalonDocumento8 páginasLevantamiento Con Cinta y JalonCasanare Humana0% (1)
- Practica 3 - Grupo 4Documento43 páginasPractica 3 - Grupo 4Mayra Alejandra Allauca MoralesAún no hay calificaciones
- Voladura de BancosDocumento19 páginasVoladura de BancosGissel Medina0% (1)
- 06 - Proyecciones EstereográficasDocumento30 páginas06 - Proyecciones Estereográficassrduquej20Aún no hay calificaciones
- Aplicacion Del GpsDocumento6 páginasAplicacion Del GpsAndresAún no hay calificaciones
- Topografía Subterránea UNSAAC FICDocumento67 páginasTopografía Subterránea UNSAAC FICAdilson Siccus HAún no hay calificaciones
- 1-Geodesia y Geomensura Aplicada A La MineriaDocumento24 páginas1-Geodesia y Geomensura Aplicada A La MineriaWalter Andres Plaza Lucero100% (1)
- Qué Es Un Túnel en MinaDocumento16 páginasQué Es Un Túnel en MinaPtRck CrbjlAún no hay calificaciones
- 3) Calicatas EléctricasDocumento1 página3) Calicatas EléctricasAlex Rodrigo RHAún no hay calificaciones
- Presentacion MalchinguiDocumento15 páginasPresentacion MalchinguiCarlos CabezasAún no hay calificaciones
- 10100-22 - Levantamiento Geológico de Un Socavón Exploratorio.Documento29 páginas10100-22 - Levantamiento Geológico de Un Socavón Exploratorio.iepcon_laccAún no hay calificaciones
- TopografiaDocumento21 páginasTopografiaKarina DuarteAún no hay calificaciones
- Clasificacion de Ligantes Por UCLDocumento11 páginasClasificacion de Ligantes Por UCLFernando MendozaAún no hay calificaciones
- Tarea Geodesia #4Documento11 páginasTarea Geodesia #4dannerAún no hay calificaciones
- Alteracion PDFDocumento6 páginasAlteracion PDFAlex Gil MichaAún no hay calificaciones
- Altimetría SatelitalDocumento12 páginasAltimetría Satelitalrene luis musajaAún no hay calificaciones
- Modelamiento de Una Superficie SurferDocumento3 páginasModelamiento de Una Superficie SurferSusan AlcaldeAún no hay calificaciones
- Resumen Semana 9-11-17Documento9 páginasResumen Semana 9-11-17Jhonnathan Lazo CarhuazAún no hay calificaciones
- Informe 3-Grupo 4Documento31 páginasInforme 3-Grupo 4Roger Jhonatan Huaracha QuispeAún no hay calificaciones
- Diapositiva GPSDocumento14 páginasDiapositiva GPSGpsAún no hay calificaciones
- Marco TeóricoDocumento13 páginasMarco TeóricoparatodoxAún no hay calificaciones
- 2 Sistema de CoordenadasDocumento4 páginas2 Sistema de CoordenadasSebastián Alexis Pizarro MejiasAún no hay calificaciones
- Rumbo y BuzamientoDocumento11 páginasRumbo y BuzamientoysgpcAún no hay calificaciones
- NivelaciónDocumento11 páginasNivelaciónel pro GamerAún no hay calificaciones
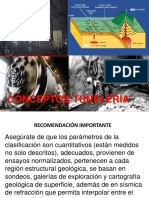
- 1 Conceptos de TuneleriaDocumento163 páginas1 Conceptos de TuneleriaDENNIS PABEL RAMIRO MAMANI SIMEON100% (1)
- Aplicacion de La Topografia en El Inegi PDFDocumento9 páginasAplicacion de La Topografia en El Inegi PDFAbizahi Méndez HernándezAún no hay calificaciones
- TIF - Geodesia SatelitalDocumento22 páginasTIF - Geodesia SatelitalJosephCondori100% (1)
- SatelitesDocumento28 páginasSatelitesR̶̲̲̲̲̿̿i̶̲̲̲̲̿̿c̶̲̲̲̲̿̿h̶̲̲̲̲̿̿a̶̲̲̲̲̿̿r̶̲̲̲̲̿̿d̶̲̲̲̲̿̿ Q̶̲̲̲̲̿̿u̶̲̲̲̲̿̿i̶̲̲̲̲̿̿s̶̲̲̲̲̿̿p̶̲̲̲̲̿̿e̶̲̲̲̲̿̿ S̶̲̲̲̲̿̿a̶̲̲̲̲̿̿l̶̲̲̲̲̿̿a̶̲̲̲̲̿̿s̶̲̲̲̲̿̿Aún no hay calificaciones
- Volúmenes de Tránsito Promedio Diario y AnualDocumento6 páginasVolúmenes de Tránsito Promedio Diario y AnualIván Andrés CoralAún no hay calificaciones
- Topografia Informe 2 WilDocumento13 páginasTopografia Informe 2 WilwilfredoAún no hay calificaciones
- Exposicion Geodesia Satelital (GNSS)Documento39 páginasExposicion Geodesia Satelital (GNSS)Pepe NasonupistaAún no hay calificaciones
- Sensores remotos: Avances y aplicaciones en visión por computadora para teledetecciónDe EverandSensores remotos: Avances y aplicaciones en visión por computadora para teledetecciónAún no hay calificaciones
- Planes 1 Tarea 1Documento20 páginasPlanes 1 Tarea 1JuanDiegoTezénMaldonadoAún no hay calificaciones
- Plan Técnico Fundamental de SeñalizaciónDocumento49 páginasPlan Técnico Fundamental de SeñalizaciónJuanDiegoTezénMaldonadoAún no hay calificaciones
- Examenes CcnaDocumento43 páginasExamenes CcnaJuanDiegoTezénMaldonadoAún no hay calificaciones
- Carta A GringottsDocumento1 páginaCarta A GringottsJuanDiegoTezénMaldonadoAún no hay calificaciones
- Charla de Induccion Becarios 2017-2Documento38 páginasCharla de Induccion Becarios 2017-2JuanDiegoTezénMaldonadoAún no hay calificaciones
- Clases de Dispositivos Electrónicos (Ing. Ponce)Documento47 páginasClases de Dispositivos Electrónicos (Ing. Ponce)JuanDiegoTezénMaldonadoAún no hay calificaciones
- Diagrama Del OjoDocumento4 páginasDiagrama Del OjoJuanDiegoTezénMaldonadoAún no hay calificaciones
- EDO TP5 (Laplace) 2022 (II)Documento3 páginasEDO TP5 (Laplace) 2022 (II)Day AndradeAún no hay calificaciones
- Practica 2 PUENTE DE WHEASTONEDocumento6 páginasPractica 2 PUENTE DE WHEASTONEHernández Lazcano YovaryAún no hay calificaciones
- TrifasicoDocumento4 páginasTrifasicomartina1717Aún no hay calificaciones
- Experimento Del AzucarDocumento2 páginasExperimento Del AzucarCamilo Rojas rivera100% (1)
- NORMASDocumento18 páginasNORMASFabián Alberto TarcayaAún no hay calificaciones
- Trabajo Edificio 201820Documento10 páginasTrabajo Edificio 201820pablo_sajnovichAún no hay calificaciones
- Ficha de Trabajo - IsotoposDocumento4 páginasFicha de Trabajo - IsotoposKristen PetersonAún no hay calificaciones
- En Los Ejercicios 5 Al 12 Evalué La Integral IteradaDocumento5 páginasEn Los Ejercicios 5 Al 12 Evalué La Integral IteradabrendaAún no hay calificaciones
- Calorimetria IDocumento7 páginasCalorimetria IDiego Armando Colque BautistaAún no hay calificaciones
- Informe de Electroforesis de ProteinasDocumento15 páginasInforme de Electroforesis de ProteinasNicolas Sanchez GomezAún no hay calificaciones
- Examen DS 03Documento15 páginasExamen DS 03ernesto trejoAún no hay calificaciones
- Flujo Uniforme en Canales AbiertosDocumento19 páginasFlujo Uniforme en Canales AbiertosAustria GuillenAún no hay calificaciones
- RocasDocumento15 páginasRocasBrayanFarfanLoayzaAún no hay calificaciones
- Tarea 5 Trigonometria 2Documento5 páginasTarea 5 Trigonometria 2yanibel altagracia monegroAún no hay calificaciones
- PTT EviewsDocumento60 páginasPTT EviewsCarol Estefania T. CampanaAún no hay calificaciones
- SEM 02 APLI REPARACION DE MOTO Dilatacion TermicaDocumento29 páginasSEM 02 APLI REPARACION DE MOTO Dilatacion TermicaEdgar Adan Lucas0% (1)
- Taller Funciones TrigonometricasDocumento3 páginasTaller Funciones TrigonometricasJeanette Badilla50% (2)
- Fisica IDocumento4 páginasFisica IIrma TaipeAún no hay calificaciones
- Mdm005 Modelos de Calculo Arbol de CargasDocumento7 páginasMdm005 Modelos de Calculo Arbol de CargasJureico Reynald Cornejo UrteagaAún no hay calificaciones
- Proyecto Calculo IDocumento9 páginasProyecto Calculo ILina MaríaAún no hay calificaciones
- Buenas Practicas en IpsDocumento56 páginasBuenas Practicas en IpsSantiago GilAún no hay calificaciones
- Protocolo de Prueba Preensamblado AL. 2x50 Mm2 AAC +1x50 Mm2 AAAC ELEPCO S.A.Documento1 páginaProtocolo de Prueba Preensamblado AL. 2x50 Mm2 AAC +1x50 Mm2 AAAC ELEPCO S.A.JULIETA VASCONEZAún no hay calificaciones
- Aislador Pasante - Buchas PDFDocumento10 páginasAislador Pasante - Buchas PDFwiLLiam ParedesAún no hay calificaciones
- Taller de MatematicasDocumento38 páginasTaller de MatematicasyesikaAún no hay calificaciones
- Formula MolecularDocumento5 páginasFormula MolecularYanid Díaz Sánchez100% (1)