También podría gustarte
- Planeamiento Estrategico HenkelDocumento30 páginasPlaneamiento Estrategico Henkelfatii_093100% (2)
- Manual de Electricidad Automotriz..Documento86 páginasManual de Electricidad Automotriz..Ricardo Peralta100% (7)
- BMWDocumento150 páginasBMWbeto222_100% (24)
- Descarga El Curso de CEHv9 by Ethical Hacking en EspañolDocumento3 páginasDescarga El Curso de CEHv9 by Ethical Hacking en EspañolRoco ElWuero33% (3)
- Labo 3 Anunciador de Primera FallaDocumento8 páginasLabo 3 Anunciador de Primera FallaPedro BeltranAún no hay calificaciones
- Errores de Dirección PDFDocumento29 páginasErrores de Dirección PDFdanielvep100% (1)
- FiatDocumento456 páginasFiatlufranju84% (32)
- Memoria Practica Chapa Con PlanoDocumento31 páginasMemoria Practica Chapa Con Planovito27Aún no hay calificaciones
- Hiegiene PecuariaDocumento15 páginasHiegiene PecuariaIvan Martinez RuizAún no hay calificaciones
- Curso de Programación en C# Windows FormDocumento16 páginasCurso de Programación en C# Windows FormClaudia FelizAún no hay calificaciones
- Rele VadorDocumento8 páginasRele VadorLusvin de LeonAún no hay calificaciones
- Practica 3 - Semaforo Con LimitsDocumento12 páginasPractica 3 - Semaforo Con LimitsDavid SanAún no hay calificaciones
- Manual Sitg. Electtrico XBC-MBC.ODocumento108 páginasManual Sitg. Electtrico XBC-MBC.Ohecazorla100% (23)
- Lab - Electronico 1Documento37 páginasLab - Electronico 1Cesar Mamani ancietaAún no hay calificaciones
- Control On Off YokogawaDocumento29 páginasControl On Off YokogawaJordy Figueroa PachecoAún no hay calificaciones
- Awl PDFDocumento30 páginasAwl PDFEdo RossAún no hay calificaciones
- PLCDocumento11 páginasPLCArtero SergioAún no hay calificaciones
- CJ1W Ad081 V1Documento31 páginasCJ1W Ad081 V1RCPLG100% (1)
- Laboratorio 1. Aspectos Básicos Del Amplificador OperacionalDocumento7 páginasLaboratorio 1. Aspectos Básicos Del Amplificador OperacionalDon HenryAún no hay calificaciones
- Alfa Romeo Bosch Motronic m1.7Documento11 páginasAlfa Romeo Bosch Motronic m1.7Roger Sego100% (1)
- Practicas Electroneumatica FestoDocumento22 páginasPracticas Electroneumatica FestoAnhuar FariasAún no hay calificaciones
- FinalDocumento4 páginasFinalWalter Rivera LozadaAún no hay calificaciones
- Bobinado de Motores Electricos Detallado Como Desmontar Un Motor y BobinarloDocumento13 páginasBobinado de Motores Electricos Detallado Como Desmontar Un Motor y BobinarloHeber Mamani CcoyoAún no hay calificaciones
- AFM02.6 - Electroneumatica CascadaDocumento30 páginasAFM02.6 - Electroneumatica CascadaFrank JunkandprettyAún no hay calificaciones
- Electronica Digital AutomocionDocumento27 páginasElectronica Digital AutomocionJuan Carlos Regalado AnguianoAún no hay calificaciones
- Electricidad y Eelectronica Automotriz A DescargarDocumento5 páginasElectricidad y Eelectronica Automotriz A DescargarJohAny BustamanteAún no hay calificaciones
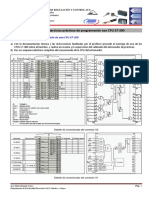
- Ejercicios de Programacic3b3n Con s7 300 1c2aa Parte PDFDocumento7 páginasEjercicios de Programacic3b3n Con s7 300 1c2aa Parte PDFefrenvoAún no hay calificaciones
- Alfa Romeo 155 V6 2500 PDFDocumento9 páginasAlfa Romeo 155 V6 2500 PDFinyecciolanave100% (1)
- Amplificador de InstrumentacionDocumento8 páginasAmplificador de InstrumentacionMiguel PalaciosAún no hay calificaciones
- Practica Logicos Erika JudithDocumento15 páginasPractica Logicos Erika Juditheduardo cruzAún no hay calificaciones
- Simbología Neumática e HidráulicaDocumento30 páginasSimbología Neumática e Hidráulicarhein123Aún no hay calificaciones
- Practica 4 - Semaforo Con Limits y CounterDocumento13 páginasPractica 4 - Semaforo Con Limits y CounterDavid SanAún no hay calificaciones
- Laboratorio 6Documento12 páginasLaboratorio 6Duncan McAún no hay calificaciones
- Basico Omron ProgramacionDocumento40 páginasBasico Omron ProgramacionBertii TaAún no hay calificaciones
- Apuntes Caja Konka KSDT863-MDocumento7 páginasApuntes Caja Konka KSDT863-MEldys Juan Lima Soto100% (2)
- Programación Básica de Autómatas OMRONDocumento40 páginasProgramación Básica de Autómatas OMRONCristian RuizAún no hay calificaciones
- PLEIIIDocumento12 páginasPLEIIIelectronico49Aún no hay calificaciones
- Simbología Neumática e HidráulicaDocumento19 páginasSimbología Neumática e HidráulicabobionAún no hay calificaciones
- Laboratorio Nro - 01 PDFDocumento6 páginasLaboratorio Nro - 01 PDFAntonyRicraRomeroAún no hay calificaciones
- Amplificadores Operacionales - Rev2011 PDFDocumento19 páginasAmplificadores Operacionales - Rev2011 PDFfusti_88Aún no hay calificaciones
- Visita Tecnica SE Santa RosaDocumento16 páginasVisita Tecnica SE Santa RosaFausto WladyAún no hay calificaciones
- T9 AutomatasDocumento23 páginasT9 AutomatasSKS0001Aún no hay calificaciones
- Método Paso A Paso ElectroneumáticaDocumento15 páginasMétodo Paso A Paso ElectroneumáticaAnonymous lzi8sgAún no hay calificaciones
- Practica 1 Inspecion Fisica de Elementos de ControlDocumento8 páginasPractica 1 Inspecion Fisica de Elementos de ControlexnarroAún no hay calificaciones
- Apuntes t6Documento6 páginasApuntes t6Jimmy CansecoAún no hay calificaciones
- Electrónica de Potencia Actividad 4Documento10 páginasElectrónica de Potencia Actividad 4Gabo SanchezAún no hay calificaciones
- Reporte 3Documento14 páginasReporte 3damianserna18Aún no hay calificaciones
- Estudio Básico de Las Compuertas LógicasDocumento8 páginasEstudio Básico de Las Compuertas LógicasVladimir AlfaroAún no hay calificaciones
- Informe Practica 7Documento13 páginasInforme Practica 7Cristian Andrés PañiAún no hay calificaciones
- Ejercicios Resueltos de Maquinas de Corriente ContinuaDocumento14 páginasEjercicios Resueltos de Maquinas de Corriente ContinuaIsrael Robert Palomino BohorquezAún no hay calificaciones
- Temario Del Nivel 2 de InyeccionDocumento23 páginasTemario Del Nivel 2 de InyeccionfabianAún no hay calificaciones
- Guía Rápida J7Documento14 páginasGuía Rápida J7Marcelino FriasAún no hay calificaciones
- Semaforo WDocumento9 páginasSemaforo WMannevar Ocupa Flores NarkinAún no hay calificaciones
- M5 9 2Documento7 páginasM5 9 2romulosimonAún no hay calificaciones
- Lab 4Documento17 páginasLab 4diegofer90100Aún no hay calificaciones
- PLC LadderDocumento17 páginasPLC LadderCARLOS ABRAHAM ROJAS RAMIREZAún no hay calificaciones
- Rele VadorDocumento12 páginasRele VadorJesús RodríguezAún no hay calificaciones
- Cuestionario ElectricidadDocumento3 páginasCuestionario ElectricidadEmmanuel33310% (1)
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoDe EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoCalificación: 4 de 5 estrellas4/5 (4)
- 100 Circuitos de Audio (ES) - volume 1De Everand100 Circuitos de Audio (ES) - volume 1Calificación: 5 de 5 estrellas5/5 (2)
- 100 Circuitos de Shields para MotoresDe Everand100 Circuitos de Shields para MotoresCalificación: 4.5 de 5 estrellas4.5/5 (4)
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)
- Citas MedicasDocumento12 páginasCitas MedicaskthpyrsAún no hay calificaciones
- Antecedentes Del Servicio Al Cliente, Hábitos y TecnologíasDocumento5 páginasAntecedentes Del Servicio Al Cliente, Hábitos y TecnologíasJoce OrtizAún no hay calificaciones
- Resumen EjecutivoDocumento2 páginasResumen EjecutivoLors Jocelyn AlexAún no hay calificaciones
- Canal Guayabo-Cumbil Alto OkDocumento45 páginasCanal Guayabo-Cumbil Alto OkSantiago DionicioAún no hay calificaciones
- Taller 3 Informatica-CanvaDocumento20 páginasTaller 3 Informatica-Canvajose andres pineda casatñedaAún no hay calificaciones
- Deber1 Meza SoledadDocumento10 páginasDeber1 Meza SoledadSoleMezaAún no hay calificaciones
- REsumen Libro ExODocumento9 páginasREsumen Libro ExOYonathan Jesus Valladares GoñeAún no hay calificaciones
- IND 414 - CONSIND-1 - Construccion de Edificios Industriales-JLGRDocumento60 páginasIND 414 - CONSIND-1 - Construccion de Edificios Industriales-JLGRLUIS VEIMAR CALLE ACHOAún no hay calificaciones
- GrupoD TPU4 Tecno3Documento4 páginasGrupoD TPU4 Tecno3Marti TapiaAún no hay calificaciones
- T010 43129726 TDocumento248 páginasT010 43129726 Tgerman100% (1)
- Informe de Visita Técnica A Constructora MorochoDocumento10 páginasInforme de Visita Técnica A Constructora MorochoErika AvilésAún no hay calificaciones
- Los Cuatro Arquetipos de La Cadena de SuministroDocumento17 páginasLos Cuatro Arquetipos de La Cadena de SuministroCristalAún no hay calificaciones
- Instalación LAMP, Nagios y ZabbixDocumento15 páginasInstalación LAMP, Nagios y Zabbixnatalia velandiaAún no hay calificaciones
- RECURSO S4 - M1CCT09B - Lenguajes de Programación y CompiladoresDocumento5 páginasRECURSO S4 - M1CCT09B - Lenguajes de Programación y CompiladoreshuellasenlalunaduetoAún no hay calificaciones
- UPS AntecedentesDocumento1 páginaUPS AntecedentesLuis GarridoAún no hay calificaciones
- Tutorial de Integración de Drivers SATA Con NLite 1Documento27 páginasTutorial de Integración de Drivers SATA Con NLite 1puertalabsAún no hay calificaciones
- PCal 2020 04 Proyecto Integrador II (4219)Documento8 páginasPCal 2020 04 Proyecto Integrador II (4219)Johan Silva CuevaAún no hay calificaciones
- WEATHERFORDDocumento14 páginasWEATHERFORDdollyAún no hay calificaciones
- Manual de InstruccionesDocumento7 páginasManual de InstruccionesCeleynes RTAún no hay calificaciones
- I2IoT20 Chp6 Instructor Supplemental+MaterialDocumento22 páginasI2IoT20 Chp6 Instructor Supplemental+MaterialdadwinzAún no hay calificaciones
- Tarea1.creación de Empresa PDFDocumento1 páginaTarea1.creación de Empresa PDFAndy CudcoAún no hay calificaciones
- Bioética La Calidad de Vida en El Siglo XXIDocumento144 páginasBioética La Calidad de Vida en El Siglo XXIAna Rivera Castañon100% (1)
- H30 1.6 (2009 y Después)Documento3 páginasH30 1.6 (2009 y Después)Henry SilvaAún no hay calificaciones
- Modelos de Desarrollo de SoftwareDocumento12 páginasModelos de Desarrollo de SoftwareKhrys De La VegaAún no hay calificaciones
- TPN - 6 PracticaDocumento15 páginasTPN - 6 PracticaMatias CalisayaAún no hay calificaciones