También podría gustarte
- ES Gasolinas Bienestar Al 08032024Documento186 páginasES Gasolinas Bienestar Al 08032024cajamasa2022Aún no hay calificaciones
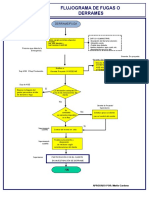
- F-VA Flujo para Emergencias en Caso de Derrame o Fugas Rev.07Documento1 páginaF-VA Flujo para Emergencias en Caso de Derrame o Fugas Rev.07Marbic Cortes100% (1)
- Apunte Completo TransmicionDocumento193 páginasApunte Completo TransmicionGustavo Nicolás CañeteAún no hay calificaciones
- Charla Tecnica MotoresDocumento25 páginasCharla Tecnica MotoresEnrique Cortes Maya100% (1)
- Diseño de Estaciones de Bombeo y Selección de BombasDocumento36 páginasDiseño de Estaciones de Bombeo y Selección de BombasJuan Fernando Neyra CamposAún no hay calificaciones
- Weg México S.A. de C.VDocumento11 páginasWeg México S.A. de C.VManuel HoyoAún no hay calificaciones
- La Costura de La Escritura, de Óscar Durán IbatáDocumento56 páginasLa Costura de La Escritura, de Óscar Durán IbatáPuroperiodismo100% (2)
- Catalogo de Ventiladores para La Refrigeración de TransformadoresDocumento74 páginasCatalogo de Ventiladores para La Refrigeración de Transformadoresjhon_angulo_3Aún no hay calificaciones
- Valvulas de ControlDocumento36 páginasValvulas de ControlGloria Elena PerezAún no hay calificaciones
- ElectroBombas Grundfos - CRDocumento34 páginasElectroBombas Grundfos - CRJC ParedesAún no hay calificaciones
- Clases Del TributoDocumento13 páginasClases Del TributoSandriitoLopezzAún no hay calificaciones
- Sistemas de Puesta A Tierra Diapositivas PDFDocumento38 páginasSistemas de Puesta A Tierra Diapositivas PDFAmbar S100% (1)
- Unidades Agrícolas Familiares Parcelaciones Vs PotDocumento7 páginasUnidades Agrícolas Familiares Parcelaciones Vs PotRobinson Mosquera100% (1)
- WEG Motor de Induccion Trifasicos de Alta y Baja Tension 629 Catalogo EspanolDocumento12 páginasWEG Motor de Induccion Trifasicos de Alta y Baja Tension 629 Catalogo EspanolDavid Alejandro Estefani MonárrezAún no hay calificaciones
- Criterios de Selección de AC Variadores de Velocidad (Convertidor de Frecuencia) para Los Usuarios - Unidad de CA, La Unidad de Velocidad VariableDocumento5 páginasCriterios de Selección de AC Variadores de Velocidad (Convertidor de Frecuencia) para Los Usuarios - Unidad de CA, La Unidad de Velocidad VariableedcocuAún no hay calificaciones
- SLV.80.80.92.2.61F.CDocumento5 páginasSLV.80.80.92.2.61F.CJose Comeca RojasAún no hay calificaciones
- Fallas en Motor de Bomba Sumergible Pozo 1 10-02-2018Documento9 páginasFallas en Motor de Bomba Sumergible Pozo 1 10-02-2018jose aguileraAún no hay calificaciones
- VariadorFrecuenciaElectronico 0116 PDFDocumento3 páginasVariadorFrecuenciaElectronico 0116 PDFJuan Carlos Ledesma TorresAún no hay calificaciones
- 2013 JUN - Prueba Al Nucleo Laminado de EstatorDocumento1 página2013 JUN - Prueba Al Nucleo Laminado de Estatorlupillorivera9981Aún no hay calificaciones
- Tipos de Ruidos Electricos PDFDocumento9 páginasTipos de Ruidos Electricos PDFKevinn MartinezAún no hay calificaciones
- Manual Analizador pqm-700 PDFDocumento152 páginasManual Analizador pqm-700 PDFHANS MACAYAAún no hay calificaciones
- Avr Eas20 SveDocumento8 páginasAvr Eas20 Sveeduardoguerra155_604Aún no hay calificaciones
- VDF Siemens para VertimillDocumento26 páginasVDF Siemens para VertimillleosoriojAún no hay calificaciones
- Analizador Dinámico de MotoresDocumento22 páginasAnalizador Dinámico de Motoresalf_haroAún no hay calificaciones
- Reparación Del Sistema de Refrigeración PDFDocumento113 páginasReparación Del Sistema de Refrigeración PDFjoseAún no hay calificaciones
- 16 Manual Sumoto 2 Sumergible PDFDocumento8 páginas16 Manual Sumoto 2 Sumergible PDFPASTOR PALMAAún no hay calificaciones
- Sistema de RefrigeraciónDocumento72 páginasSistema de RefrigeraciónMarcelo Morales LunaAún no hay calificaciones
- Datos de Aplicación para Motores Sumergibles PDFDocumento31 páginasDatos de Aplicación para Motores Sumergibles PDFdorao80Aún no hay calificaciones
- Determinar PerdidasDocumento3 páginasDeterminar PerdidasFrânçïsçô DâvïdAún no hay calificaciones
- Pruebas de Núcleos A Motores ElectricosDocumento2 páginasPruebas de Núcleos A Motores ElectricosYOMAR PARRAAún no hay calificaciones
- Bomba de Agua y TermostatoDocumento9 páginasBomba de Agua y TermostatoGuido Pinedo100% (1)
- Presentacion Essbio Fallas Bombas SumergiblesDocumento16 páginasPresentacion Essbio Fallas Bombas SumergiblesLuis O MejiasAún no hay calificaciones
- Anteproyecto Sistema de Lubricacion-Modificado IberoamericanoDocumento48 páginasAnteproyecto Sistema de Lubricacion-Modificado IberoamericanoJE Yufra0% (1)
- Estaciones de BombeoDocumento13 páginasEstaciones de BombeoJhon Freiman AriasAún no hay calificaciones
- Presetacion ET CORRIENTE INDUCIDASDocumento23 páginasPresetacion ET CORRIENTE INDUCIDASpaolaAún no hay calificaciones
- Lab N1 TermofluidosDocumento5 páginasLab N1 TermofluidosAlfred Anaya ValenciaAún no hay calificaciones
- Justificación Tecnica de Listado de Repuestos Adicionales para UPSDocumento2 páginasJustificación Tecnica de Listado de Repuestos Adicionales para UPSJulio Cesar Bolivar GonzalezAún no hay calificaciones
- Sellos MecánicosDocumento27 páginasSellos Mecánicoszapata_93600Aún no hay calificaciones
- T-06 Diagnóstico y Mantenimiento de Un Generador SíncronoDocumento17 páginasT-06 Diagnóstico y Mantenimiento de Un Generador SíncronoDimas Caceres100% (1)
- Análisis de Criticidad y Árboles de Diagnóstico de Fallas para Transformadores de PotenciaDocumento8 páginasAnálisis de Criticidad y Árboles de Diagnóstico de Fallas para Transformadores de Potenciainsu24Aún no hay calificaciones
- 2017 10 30 Pruebas Estáticas en MotoresDocumento47 páginas2017 10 30 Pruebas Estáticas en MotoresLVGTECNOLOGIAAún no hay calificaciones
- 3-2 Calculos para El Diseno de Circ Aliment en Una Ie ComercialDocumento21 páginas3-2 Calculos para El Diseno de Circ Aliment en Una Ie ComercialGustavo Montalvo MoralesAún no hay calificaciones
- 1.valvulas de Control de PresionDocumento109 páginas1.valvulas de Control de PresionHECTOR IBARRAAún no hay calificaciones
- Presentacion Bombas Sumergibles.Documento14 páginasPresentacion Bombas Sumergibles.Jhosmery AlvarezAún no hay calificaciones
- ESI Pipeline Studio 4Documento2 páginasESI Pipeline Studio 4jorge1952Aún no hay calificaciones
- AB IYO ED 09 227 01 Satelites de AguaDocumento10 páginasAB IYO ED 09 227 01 Satelites de AguaLeonardo100% (1)
- Ruido ElectricoDocumento3 páginasRuido ElectricoGeorgeXpAún no hay calificaciones
- Corrientes de Fuga Medicion FlukeDocumento2 páginasCorrientes de Fuga Medicion FlukeWilson GarciaAún no hay calificaciones
- Informe Aguas DanzantesDocumento20 páginasInforme Aguas DanzantesAlan Ricardo Serrano Pucheta100% (1)
- Maquinas Asincronas Jaula de ArdillaDocumento11 páginasMaquinas Asincronas Jaula de ArdillaSting Tejada100% (1)
- Tornillos y PernosDocumento16 páginasTornillos y PernosAliceAngelicAún no hay calificaciones
- Seminario Bombas Cetrífugas - Tucuman 11-2018-R PDFDocumento198 páginasSeminario Bombas Cetrífugas - Tucuman 11-2018-R PDFGerman DiBaccoAún no hay calificaciones
- Rotor Jaula de Ardilla Vs EmbobinadoDocumento9 páginasRotor Jaula de Ardilla Vs EmbobinadoAndrés PinedaAún no hay calificaciones
- Especificaciones de Separadores ElectrostáticosDocumento45 páginasEspecificaciones de Separadores ElectrostáticosLerida SalazarAún no hay calificaciones
- Garantias PDFDocumento20 páginasGarantias PDFBrayan CeballosAún no hay calificaciones
- HidrotecniaDocumento39 páginasHidrotecniaJohn RuizAún no hay calificaciones
- Guia de Diseño de Intercambiadores de Calor MultituboDocumento11 páginasGuia de Diseño de Intercambiadores de Calor MultituboReynaldoJMAún no hay calificaciones
- Esquemas de GeneradoresDocumento25 páginasEsquemas de GeneradoresRoberto HermenegildoAún no hay calificaciones
- Franklin Electric 4,0 HP TrifasicoDocumento2 páginasFranklin Electric 4,0 HP Trifasicomikolson1Aún no hay calificaciones
- 06 Puesta en Operación de Un Generador Síncrono Con Carga.Documento13 páginas06 Puesta en Operación de Un Generador Síncrono Con Carga.Juam YupanquiAún no hay calificaciones
- Convertir A Word 003Documento5 páginasConvertir A Word 003Richard LozanoAún no hay calificaciones
- Variadores de Velocidad WebDocumento4 páginasVariadores de Velocidad WebVictor C. CcariAún no hay calificaciones
- Fundamentos de Un VDFDocumento4 páginasFundamentos de Un VDFAlesky Inthe SkyAún no hay calificaciones
- Fundamentos de Un VDFDocumento4 páginasFundamentos de Un VDFAlesky Inthe SkyAún no hay calificaciones
- Foro de ArrancadoresDocumento12 páginasForo de ArrancadoresJosue ClAún no hay calificaciones
- Mapa EmpatiaDocumento1 páginaMapa Empatialuis anayaAún no hay calificaciones
- Equipos y Procesos Del GasDocumento9 páginasEquipos y Procesos Del GasMiguelanyelis ZaragozaAún no hay calificaciones
- Regeneración Periodontal S6Documento3 páginasRegeneración Periodontal S6Annie Lucero GonzalesAún no hay calificaciones
- Lab 5 Brayan Sabillon 21911131Documento16 páginasLab 5 Brayan Sabillon 21911131Brayan SabillonAún no hay calificaciones
- Diagnostico Relacion Mandante-Contratista 2006Documento0 páginasDiagnostico Relacion Mandante-Contratista 2006Juan Camilo Aldana BarreraAún no hay calificaciones
- Presupuesto Instalaciones ElectricasDocumento4 páginasPresupuesto Instalaciones ElectricasArmando GutierrezAún no hay calificaciones
- SUNASSDocumento21 páginasSUNASSSOL YOMIRA SEGOVIA SOTOAún no hay calificaciones
- Plan de Investigación de Revisión BibliográficaDocumento4 páginasPlan de Investigación de Revisión BibliográficadenisrosasblancasAún no hay calificaciones
- Ant-Md 010 Aspect AmbitDocumento7 páginasAnt-Md 010 Aspect Ambitwilder vilca oreAún no hay calificaciones
- 13 PPT Sesión 13 - Presup. de Costos Indirectos de Fabricacion y Gtos Operativos 4Documento9 páginas13 PPT Sesión 13 - Presup. de Costos Indirectos de Fabricacion y Gtos Operativos 4Eduardo AlonsoAún no hay calificaciones
- Decreto Supremo #023Documento23 páginasDecreto Supremo #023Johangli Leonid cordova cordovaAún no hay calificaciones
- Analisis de ExperienciaDocumento8 páginasAnalisis de ExperienciaAngelica F RamirezAún no hay calificaciones
- Personal Social 24-08-21Documento4 páginasPersonal Social 24-08-21JAIME CHICHA FUENTESAún no hay calificaciones
- AbreviaturasDocumento3 páginasAbreviaturasViktor CalAún no hay calificaciones
- 1.2 Cualitativa y CuantitativaDocumento7 páginas1.2 Cualitativa y CuantitativaVallejo YamiletAún no hay calificaciones
- Clase 1 B IIDocumento53 páginasClase 1 B IIDaniela RiveraAún no hay calificaciones
- Manual de Producción de CamoteDocumento25 páginasManual de Producción de CamoteMiguel CáceresAún no hay calificaciones
- Catequesis Oh Alto y Glorioso DiosDocumento3 páginasCatequesis Oh Alto y Glorioso DiosdiegoroferAún no hay calificaciones
- Unidades de Propiedad EstructurasDocumento32 páginasUnidades de Propiedad EstructurasVíctor SaulaAún no hay calificaciones
- Manual Usuario Impresora Brother Mfc-l6900dwDocumento102 páginasManual Usuario Impresora Brother Mfc-l6900dwAndres Uribe linares100% (1)
- Agua Viscocidad PDFDocumento1 páginaAgua Viscocidad PDFcristo haro100% (1)
- Transporte de Tornillo FlexibleDocumento2 páginasTransporte de Tornillo FlexibleAbdulCainAún no hay calificaciones
- Preguntas y Respuestas de Fisica LabDocumento3 páginasPreguntas y Respuestas de Fisica LabYirly YuLieth Guisao ZuluagaAún no hay calificaciones
- La Escuela Como Organización Algunas Imágenes MetafóricasDocumento18 páginasLa Escuela Como Organización Algunas Imágenes MetafóricasAlfon LivioAún no hay calificaciones
- Plan de Acompañamiento Visitas Aulicas - Fge 2018Documento14 páginasPlan de Acompañamiento Visitas Aulicas - Fge 2018Ipuh SucúaAún no hay calificaciones