También podría gustarte
- Frenet-Serret y Vector TorsiónDocumento13 páginasFrenet-Serret y Vector TorsiónAdrian Alexis Rivera OrtizAún no hay calificaciones
- Transformacion de Coordenadas.Documento21 páginasTransformacion de Coordenadas.yon_albert_20100% (2)
- Trabajo de Investigación de Curvas Planas, Ecuaciones Paramétricas y Coordenadas Polares, Ecuaciones Paramétricas de Algunas CurvasDocumento7 páginasTrabajo de Investigación de Curvas Planas, Ecuaciones Paramétricas y Coordenadas Polares, Ecuaciones Paramétricas de Algunas CurvasisabelAún no hay calificaciones
- 5to Informe de Analisis InstrumentalDocumento12 páginas5to Informe de Analisis InstrumentalDiana Supo OsorioAún no hay calificaciones
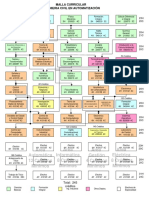
- Malla Ica B-N Con Total de Horas y CreditosDocumento1 páginaMalla Ica B-N Con Total de Horas y CreditosOscar Ivan Vizcarra SepulvedaAún no hay calificaciones
- Informe de Lineas de CorrienteDocumento19 páginasInforme de Lineas de CorrienteAntony More VillegasAún no hay calificaciones
- Sol Mat II Tema6 Geometria Euclidea Producto EscalarDocumento26 páginasSol Mat II Tema6 Geometria Euclidea Producto Escalarandrei129Aún no hay calificaciones
- Transformaciones GeometricasDocumento59 páginasTransformaciones GeometricaszaidaAún no hay calificaciones
- Ecuaciones Paramétricas, Coordenadas Polares y Aplicaciones de La Integral en La Ingeniería MecánicaDocumento35 páginasEcuaciones Paramétricas, Coordenadas Polares y Aplicaciones de La Integral en La Ingeniería Mecánicacocoloco 2003Aún no hay calificaciones
- Matrices en Videojuegos 2Documento6 páginasMatrices en Videojuegos 2Papulo “Papulo”Aún no hay calificaciones
- UNIDAD 02 Ejercicios Robotica I ExtDocumento11 páginasUNIDAD 02 Ejercicios Robotica I ExtPablo DuqueAún no hay calificaciones
- Robotic ToolboxDocumento71 páginasRobotic ToolboxJordy PerezAún no hay calificaciones
- Transformaciones Geometricas PDFDocumento46 páginasTransformaciones Geometricas PDFOmar Lopez C.Aún no hay calificaciones
- CurvasDocumento9 páginasCurvasdjmonse90Aún no hay calificaciones
- 6 Práctico Transformaciones IsométricasDocumento5 páginas6 Práctico Transformaciones Isométricasbrenda paola cortes vegaAún no hay calificaciones
- Jhonatanespinalgarcia FR CurvasDocumento10 páginasJhonatanespinalgarcia FR CurvasRay TennysonAún no hay calificaciones
- GE-HT - Semana 7 - Aplicaciones de Las Transformaciones LinealesDocumento6 páginasGE-HT - Semana 7 - Aplicaciones de Las Transformaciones Linealessofia mendozaAún no hay calificaciones
- Ecuaciones Empiricas ImformeDocumento8 páginasEcuaciones Empiricas ImformeJheremy DavilaAún no hay calificaciones
- Sandoval Avalos - 3E - Actividad 3Documento11 páginasSandoval Avalos - 3E - Actividad 3AngelaAún no hay calificaciones
- 2.6 Cálculo en Coordenadas PolaresDocumento5 páginas2.6 Cálculo en Coordenadas PolaresAnette100% (1)
- La Línea Recta PDFDocumento12 páginasLa Línea Recta PDFAngel AquinoAún no hay calificaciones
- Graficacion Unidad II 2 2 Al 2 7Documento24 páginasGraficacion Unidad II 2 2 Al 2 7Aly CamAún no hay calificaciones
- Informe Laboratorio FisicaDocumento13 páginasInforme Laboratorio FisicaClement Holguin100% (2)
- Tornillo Sin FinDocumento6 páginasTornillo Sin FinDiegho Dijei ZetaAún no hay calificaciones
- Trabajo Integrador CVVDocumento14 páginasTrabajo Integrador CVVNoelia VicencioAún no hay calificaciones
- UntitledDocumento10 páginasUntitledJair CruzAún no hay calificaciones
- Modulo Mate 3Documento56 páginasModulo Mate 3Mateo R. GallegoAún no hay calificaciones
- Evidenciamate 3Documento23 páginasEvidenciamate 3daniel salazarAún no hay calificaciones
- Transformacion de CoordenadasDocumento28 páginasTransformacion de CoordenadasLuis ArceAún no hay calificaciones
- Gradiente, Divergencia y Rotacional.Documento25 páginasGradiente, Divergencia y Rotacional.jumapamoAún no hay calificaciones
- Geometria de Las TL en El Plano 2013Documento6 páginasGeometria de Las TL en El Plano 2013Santi VillarrazaAún no hay calificaciones
- CircunferenciaDocumento7 páginasCircunferenciaAlexis FloresAún no hay calificaciones
- TransformadasDocumento7 páginasTransformadasCesar TorresAún no hay calificaciones
- Algunos Tensores de Segundo OrdenDocumento19 páginasAlgunos Tensores de Segundo OrdenAMYNNXXXXAún no hay calificaciones
- Aplicación en MatlabDocumento5 páginasAplicación en MatlabalecasazolaAún no hay calificaciones
- Algebra LinealDocumento9 páginasAlgebra LinealSam Derek frostAún no hay calificaciones
- Ometria A.2Documento16 páginasOmetria A.2Kevin OsedaAún no hay calificaciones
- Algebra LinealDocumento8 páginasAlgebra LinealSam Derek frostAún no hay calificaciones
- Práctica 2. Ecuaciones Paramétricas y Coordenadas Polares 2Documento10 páginasPráctica 2. Ecuaciones Paramétricas y Coordenadas Polares 2Brandom Monroy CarbajalAún no hay calificaciones
- Problemas de Calculo 3Documento9 páginasProblemas de Calculo 3Rudxy MAún no hay calificaciones
- Cambio de VariablesDocumento5 páginasCambio de VariablesXMonsterx XWorldxAún no hay calificaciones
- El Algoritmo CORDICDocumento13 páginasEl Algoritmo CORDICmiteratosAún no hay calificaciones
- Desbalance RotatorioDocumento10 páginasDesbalance RotatorioAlejandro GarcilazoAún no hay calificaciones
- 2 Derivada Direccional y Vector GradienteDocumento12 páginas2 Derivada Direccional y Vector GradienteJosue HernandezAún no hay calificaciones
- Cap 18 Operadores Diferenciales PDFDocumento38 páginasCap 18 Operadores Diferenciales PDFJuan Bautista Mercado Pérez100% (1)
- Tarea Integradora II MatematicasDocumento16 páginasTarea Integradora II MatematicasIsabela AlejandreAún no hay calificaciones
- Movimiento en Dos DimensionesDocumento4 páginasMovimiento en Dos DimensionesleolugoeAún no hay calificaciones
- Tema 7 Mat 102 1-2023 G - C. CivilDocumento18 páginasTema 7 Mat 102 1-2023 G - C. CivilLoopCast 123Aún no hay calificaciones
- Resolución Trabajo Práctico Nº9 (Tpn°8)Documento6 páginasResolución Trabajo Práctico Nº9 (Tpn°8)Antonella Cruz GuaymasAún no hay calificaciones
- El Plano CartesianoDocumento37 páginasEl Plano CartesianoAmy20020% (1)
- Ejercicios Cálculo Diferencial Vectorial #3Documento8 páginasEjercicios Cálculo Diferencial Vectorial #3solucionario7Aún no hay calificaciones
- Cálculo Del Flujo Potencial Empleando El Métodos NuméricosDocumento20 páginasCálculo Del Flujo Potencial Empleando El Métodos NuméricosLeidy Angelica Mena100% (1)
- Transformaciones AfinesDocumento13 páginasTransformaciones AfinesAMYNNXXXX100% (1)
- Hoja Ejercicios Funciones TrigonometricasDocumento14 páginasHoja Ejercicios Funciones Trigonometricasneocronox777Aún no hay calificaciones
- Control II - Criterio de Estabilidad de NyquistDocumento20 páginasControl II - Criterio de Estabilidad de NyquistJovany Salazar100% (1)
- Trabajo de Investigación Calculo de Varias VariableDocumento11 páginasTrabajo de Investigación Calculo de Varias VariableLeiber QuevedoAún no hay calificaciones
- Gráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraDe EverandGráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraAún no hay calificaciones
- Interpolación bilineal: Mejora de la resolución y claridad de la imagen mediante interpolación bilinealDe EverandInterpolación bilineal: Mejora de la resolución y claridad de la imagen mediante interpolación bilinealAún no hay calificaciones
- Transformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.De EverandTransformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.Aún no hay calificaciones
- Homografía: Homografía: Transformaciones en Visión por ComputadorDe EverandHomografía: Homografía: Transformaciones en Visión por ComputadorAún no hay calificaciones
- Geomecanica Lab 1Documento22 páginasGeomecanica Lab 1IrmaEspinozaValenciaAún no hay calificaciones
- MANUAL DE HVAC y CARGAS TERMICASDocumento10 páginasMANUAL DE HVAC y CARGAS TERMICASluis Angel Aldana RangelAún no hay calificaciones
- Fluido de ControlDocumento2 páginasFluido de ControlJ C Gabino FlorenciaAún no hay calificaciones
- Estadistica AplicadaDocumento34 páginasEstadistica AplicadaCristhian MenaAún no hay calificaciones
- DEFINCIONESDocumento4 páginasDEFINCIONESEder Hidalgo GuereAún no hay calificaciones
- Guía de Aprendizaje - Expresiones AlgebraicasDocumento4 páginasGuía de Aprendizaje - Expresiones AlgebraicasMauricio Arzola BarrientosAún no hay calificaciones
- Semana 3 y 4 Tercero Electromecánica AutomotrízDocumento15 páginasSemana 3 y 4 Tercero Electromecánica AutomotrízGyuri CaimAún no hay calificaciones
- Asentamiento Total Por Metodología de NAVFACDocumento3 páginasAsentamiento Total Por Metodología de NAVFACadrian alejandro magallanes ramosAún no hay calificaciones
- Emulsiones y GelesDocumento21 páginasEmulsiones y GelesYefr Narvaez YdnmAún no hay calificaciones
- Cap4 PDFDocumento74 páginasCap4 PDFJose Alejandro Mamani SolizAún no hay calificaciones
- Calculo de Tubería, Cable y Cajas TDocumento5 páginasCalculo de Tubería, Cable y Cajas TJesus leon De la fuenteAún no hay calificaciones
- Preferencia Estructural Oh, Pic y Bpt12Documento4 páginasPreferencia Estructural Oh, Pic y Bpt12Rosana SanchezAún no hay calificaciones
- Guía de Ejercicios BiomecánicaDocumento4 páginasGuía de Ejercicios BiomecánicaVale ValdiviaAún no hay calificaciones
- MagnetismoDocumento2 páginasMagnetismoRICARBC1998Aún no hay calificaciones
- Calculo de Demanda Eléctrica Cumaribo - Grupo 1Documento34 páginasCalculo de Demanda Eléctrica Cumaribo - Grupo 1sofiaAún no hay calificaciones
- Agua para BateriaDocumento3 páginasAgua para BateriakatewestAún no hay calificaciones
- Como Hacer Motor CaseroDocumento5 páginasComo Hacer Motor CaseroAnaJackelinHernandezSeijasAún no hay calificaciones
- Clasificación de FluidosDocumento3 páginasClasificación de FluidosYunior Diaz0% (1)
- La Materia y Sus Propiedades para Segundo Grado de SecundariaDocumento4 páginasLa Materia y Sus Propiedades para Segundo Grado de SecundariaCecilia Maribel Rios GarabitoAún no hay calificaciones
- Informe PrevioDocumento11 páginasInforme PrevioYhony Luque50% (2)
- Alineamiento Entre PuntosDocumento18 páginasAlineamiento Entre PuntosCarlos Ivan Cojal Aguilar50% (2)
- Proteccion de OjosDocumento10 páginasProteccion de OjosChristian Ralfh Núñez SánchezAún no hay calificaciones
- EXPERIENCIA20N920final201 0Documento5 páginasEXPERIENCIA20N920final201 0Cesar Clemente CarbajalAún no hay calificaciones
- Practica RotametroDocumento7 páginasPractica RotametroVictor AtzinAún no hay calificaciones
- Curso Básico de Electrónica PDFDocumento39 páginasCurso Básico de Electrónica PDFMauricioAún no hay calificaciones
- Camara de Combustion HiltonDocumento20 páginasCamara de Combustion HiltonJavier Macedo RamosAún no hay calificaciones
- Bloque 4 Cuestionario PDFDocumento3 páginasBloque 4 Cuestionario PDFAlajandro MoraAún no hay calificaciones
- 6818Documento113 páginas6818Yin Tat Mog GarAún no hay calificaciones