También podría gustarte
- OSTEOLOGIA. PatoDocumento37 páginasOSTEOLOGIA. PatoGinger Lozano77% (13)
- Modelado de Un Sistema de Control de PHDocumento20 páginasModelado de Un Sistema de Control de PHPedro Manuel Rivera CalleAún no hay calificaciones
- Apuntes NEUMA SENH PDFDocumento165 páginasApuntes NEUMA SENH PDFJosé Luis Rodríguez Guerrero100% (1)
- Sintonización Pid Con MatlabDocumento7 páginasSintonización Pid Con MatlabAnthony Aldoradin Reyes100% (1)
- Manual Herramienta - Reactor BatchDocumento12 páginasManual Herramienta - Reactor BatchSebastian GaitanAún no hay calificaciones
- Lab N°1 CinéticaDocumento28 páginasLab N°1 CinéticaIgnacio DuranAún no hay calificaciones
- Introducción Al SimulinkDocumento28 páginasIntroducción Al SimulinkSarah JenkinsAún no hay calificaciones
- Práctica de Visual PrologPráctica de Visual PrologPráctica de Visual PrologDocumento2 páginasPráctica de Visual PrologPráctica de Visual PrologPráctica de Visual PrologMax Santiago100% (2)
- Simulink Manual PDFDocumento33 páginasSimulink Manual PDFMoises Bautista CastroAún no hay calificaciones
- SimulinkDocumento50 páginasSimulinkIsmael Fco100% (1)
- Simulink 14 MayDocumento56 páginasSimulink 14 MayCarlos Gustavo Pérez100% (1)
- SIMULINKDocumento15 páginasSIMULINKMario Felix MartinezAún no hay calificaciones
- Control Curvas de ReaccionDocumento9 páginasControl Curvas de ReaccionLuna ArboledaAún no hay calificaciones
- Manual de Control de Procesos 2020Documento77 páginasManual de Control de Procesos 2020Alberto CarvalhoAún no hay calificaciones
- 4 - 1 Diseño de Controladores Parte BDocumento15 páginas4 - 1 Diseño de Controladores Parte BAndrés CóndorAún no hay calificaciones
- Lab BalanceDocumento17 páginasLab BalanceALEJANDRO ALONSO OCHOA VARGASAún no hay calificaciones
- Reaccion de DesplazamientoDocumento4 páginasReaccion de Desplazamientothalia troncosAún no hay calificaciones
- Práctica Dureza VickersDocumento8 páginasPráctica Dureza VickersEmiliano SegMatAún no hay calificaciones
- LAB ANALISIS INSTRUMENTAL-2019 (Tercer Reporte)Documento58 páginasLAB ANALISIS INSTRUMENTAL-2019 (Tercer Reporte)karen linaresAún no hay calificaciones
- Modelos Matemáticos Dinámicos y Análisis de RespuestaDocumento66 páginasModelos Matemáticos Dinámicos y Análisis de Respuestaang18Aún no hay calificaciones
- 4 Procesos de Orden SuperiorDocumento27 páginas4 Procesos de Orden SuperiorLalo Angel100% (1)
- Villagomez CQC Rep 5Documento12 páginasVillagomez CQC Rep 5Adrián León PachecoAún no hay calificaciones
- Practica n1 Balance de MateriaDocumento4 páginasPractica n1 Balance de Materialisbeth suasacaAún no hay calificaciones
- Problemas (Reglasimpson)Documento6 páginasProblemas (Reglasimpson)Beta TavsaAún no hay calificaciones
- Conversión Con El Número de Damköhler en Un PFRDocumento6 páginasConversión Con El Número de Damköhler en Un PFRIngrid Abby CondoriAún no hay calificaciones
- Control On OffDocumento14 páginasControl On Offdanielamaya1111Aún no hay calificaciones
- Informe Calor 3.0Documento24 páginasInforme Calor 3.0Juan VelásquezAún no hay calificaciones
- Trabajo Final Del Bio Reactor UltimoDocumento36 páginasTrabajo Final Del Bio Reactor UltimoViviana Gimena Cjuno LeandroAún no hay calificaciones
- Memoría de Cálculo Grupo 1Documento15 páginasMemoría de Cálculo Grupo 1Toti CendoyaAún no hay calificaciones
- Practica Lab 3Documento10 páginasPractica Lab 3junior quispeAún no hay calificaciones
- Sacarosa HysysDocumento15 páginasSacarosa HysysRafael Martinez100% (1)
- Informe de Laboratorio "Memoria SET - RESET"Documento9 páginasInforme de Laboratorio "Memoria SET - RESET"Luis RondoAún no hay calificaciones
- Lab5 Control2 Unsa EpieDocumento15 páginasLab5 Control2 Unsa EpiejorticoolAún no hay calificaciones
- Lab Curva RespuestaDocumento4 páginasLab Curva RespuestaAdam Axel Veintiseis100% (1)
- El Round RobinDocumento1 páginaEl Round RobinAndres David Contreras Lopez100% (1)
- MatLab - Guia para Alumnos de Reactores QuimicosDocumento54 páginasMatLab - Guia para Alumnos de Reactores Quimicosmigueroman7415Aún no hay calificaciones
- Mi Manual de Matlab para Ingeniería QuímicaDocumento16 páginasMi Manual de Matlab para Ingeniería Químicajuherrerare0% (1)
- 1.6 Cuestionario Libro Brock 14 Ed. Cap 1 2 3 y 5Documento6 páginas1.6 Cuestionario Libro Brock 14 Ed. Cap 1 2 3 y 5Andrit Alvarado BaezAún no hay calificaciones
- Apuntes Hidrometalurgia-Técnicas de LixiviaciónDocumento7 páginasApuntes Hidrometalurgia-Técnicas de LixiviaciónNoemí RodríguezAún no hay calificaciones
- Simulación Del Proceso de Síntesis y Separación de Acetato de ButiloDocumento15 páginasSimulación Del Proceso de Síntesis y Separación de Acetato de ButiloLaura JaimesAún no hay calificaciones
- Informe Control CSTRDocumento9 páginasInforme Control CSTRMartha AlbaAún no hay calificaciones
- Calculo de Tierras para Lineas Por Medio de VarillasDocumento11 páginasCalculo de Tierras para Lineas Por Medio de VarillasInstalaciones Eléctricas ResidencialesAún no hay calificaciones
- Modelamiento Matematico de Sistemas Matlab PDFDocumento12 páginasModelamiento Matematico de Sistemas Matlab PDFjuan carlos revillaAún no hay calificaciones
- Máquinas Eléctricas (6a. Ed.) - (PG 812 - 820)Documento9 páginasMáquinas Eléctricas (6a. Ed.) - (PG 812 - 820)rodrigo sepulvedaAún no hay calificaciones
- Informe CalorimetríaDocumento12 páginasInforme CalorimetríaRosliana GonzálezAún no hay calificaciones
- Estrategias Avanzadas de Control IDocumento24 páginasEstrategias Avanzadas de Control IMauricio SerranoAún no hay calificaciones
- PDF Metodos Numericos en Matlab 1 - CompressDocumento7 páginasPDF Metodos Numericos en Matlab 1 - CompressAbad AlejandroAún no hay calificaciones
- Laboratorio 4 - Balance de MateriaDocumento15 páginasLaboratorio 4 - Balance de MateriaEdith RamosAún no hay calificaciones
- 2compensacion Atraso LGRDocumento25 páginas2compensacion Atraso LGRAngel FullerAún no hay calificaciones
- Capítulo 01. Introducción A Control Automático de ProcesosDocumento102 páginasCapítulo 01. Introducción A Control Automático de ProcesosTeofilo Donaires FloresAún no hay calificaciones
- Modalidades de ControlDocumento38 páginasModalidades de ControlJuan Se Uribe RamirezAún no hay calificaciones
- Balance de Materia y Energia en Un Reactor Tubular Adiabatico de Lecho Fijo Con Difusión RadialDocumento37 páginasBalance de Materia y Energia en Un Reactor Tubular Adiabatico de Lecho Fijo Con Difusión Radialsteve19826Aún no hay calificaciones
- Acido Tereftalico PosterDocumento1 páginaAcido Tereftalico PosterDiana50% (2)
- Lab 2 - Dinamica de Sistemas de Primer OrdenDocumento8 páginasLab 2 - Dinamica de Sistemas de Primer OrdenCamila Jackelyne ApazaAún no hay calificaciones
- LABORATORIO Teoria de Control Automatico 02 - Experiencia 4Documento18 páginasLABORATORIO Teoria de Control Automatico 02 - Experiencia 4Jhoel René Mamani HuancaAún no hay calificaciones
- Ejemplos - Simulink TEAMSDocumento98 páginasEjemplos - Simulink TEAMSherber_28Aún no hay calificaciones
- Guia para Crear Un Modelo en SimulinkDocumento37 páginasGuia para Crear Un Modelo en SimulinkALejandro PalaciosAún no hay calificaciones
- pRACTICAS SIMULINKDocumento99 páginaspRACTICAS SIMULINKwalter CancinoAún no hay calificaciones
- Simulink MétodosDocumento26 páginasSimulink Métodosana lucia manchego chavezAún no hay calificaciones
- SimulinkDocumento13 páginasSimulinkJose L. GarciaAún no hay calificaciones
- Guía de uso en Matlab en el desarrollo de modelos de volatilidadDe EverandGuía de uso en Matlab en el desarrollo de modelos de volatilidadAún no hay calificaciones
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaAún no hay calificaciones
- Simulacion SeizeDocumento2 páginasSimulacion SeizeMax SantiagoAún no hay calificaciones
- Max-Santiago (Ejer 2) - Método de La Suma de Flujos Con 3 EstadosDocumento7 páginasMax-Santiago (Ejer 2) - Método de La Suma de Flujos Con 3 EstadosMax SantiagoAún no hay calificaciones
- Definición de Error Absoluto y RelativoDocumento3 páginasDefinición de Error Absoluto y RelativoMax SantiagoAún no hay calificaciones
- Ciclo de Vida Producto BimboDocumento3 páginasCiclo de Vida Producto BimboMax Santiago57% (14)
- Justificación OperativaDocumento1 páginaJustificación OperativaMax Santiago100% (1)
- TpsDocumento3 páginasTpsMax SantiagoAún no hay calificaciones
- DC216 Temperaturas ExtremasDocumento5 páginasDC216 Temperaturas ExtremasfparilloAún no hay calificaciones
- 01 Charla Generalidades Sobre Los GasesDocumento17 páginas01 Charla Generalidades Sobre Los GasesMartin AvilaAún no hay calificaciones
- La Semana 70 de Daniel 9 - 27Documento61 páginasLa Semana 70 de Daniel 9 - 27Víctor Hugo Rodríguez BuenoAún no hay calificaciones
- Procedimiento para Contención de DerramesDocumento8 páginasProcedimiento para Contención de DerramesKarlos RamirezAún no hay calificaciones
- Objetos de ConservacionDocumento3 páginasObjetos de ConservacionJunior Andrade JaqueAún no hay calificaciones
- Redes Procesadores de Comunicacion (Francheca Hannema)Documento6 páginasRedes Procesadores de Comunicacion (Francheca Hannema)yelitza marie pichardo villarAún no hay calificaciones
- Mapa Conceptual de Chi CuadradaDocumento4 páginasMapa Conceptual de Chi Cuadradairving merazAún no hay calificaciones
- REL 2o - Medio - PDFDocumento159 páginasREL 2o - Medio - PDFMaria Andrea Fuenzalida100% (1)
- Historia AbelDocumento8 páginasHistoria AbelMoritaAún no hay calificaciones
- Ejemplo1 20Documento6 páginasEjemplo1 20Danny JaldinAún no hay calificaciones
- 10 Hábitos de Personas AltamenteDocumento4 páginas10 Hábitos de Personas AltamenteKarsisAún no hay calificaciones
- Andy Muñoz Durand Sistemade Gestion AmbientalDocumento6 páginasAndy Muñoz Durand Sistemade Gestion AmbientalAndy Muñoz DuranAún no hay calificaciones
- Contrato de Arrendamiento de Espacio para Arte StudioDocumento9 páginasContrato de Arrendamiento de Espacio para Arte StudioFco. Javier Garcia RojasAún no hay calificaciones
- CAN BusDocumento17 páginasCAN BusMartin Toriz100% (1)
- Hemorragia ObstetricaDocumento37 páginasHemorragia ObstetricaIsrael Velástegui VillaAún no hay calificaciones
- Cuestionario Tema de ErgonomiaDocumento29 páginasCuestionario Tema de ErgonomiaWalter Pinto TenecelaAún no hay calificaciones
- Lineas MipiDocumento2 páginasLineas MipiElizabethAún no hay calificaciones
- Tema 2 Actividades de Refuerzo y Profundizacic3b3n Los Sustantivos IIIDocumento4 páginasTema 2 Actividades de Refuerzo y Profundizacic3b3n Los Sustantivos IIIHugo HernándezAún no hay calificaciones
- Informe1 - Medición de TiemposDocumento11 páginasInforme1 - Medición de Tiemposluisa fernanda agudeloAún no hay calificaciones
- Pruebas ParamétricasDocumento22 páginasPruebas ParamétricasMartha HerreraAún no hay calificaciones
- Aa2 - Adminstraciòn de OperacionesDocumento12 páginasAa2 - Adminstraciòn de Operacionesfiorellasivincha45Aún no hay calificaciones
- InfografiaDocumento2 páginasInfografiaLeslie MorenoAún no hay calificaciones
- Capítulo 3Documento18 páginasCapítulo 3Liliana Dévora Cerrón DávilaAún no hay calificaciones
- GolgotaDocumento3 páginasGolgotarodrigokine777Aún no hay calificaciones
- Integrales ImpropiasDocumento3 páginasIntegrales ImpropiassufiAún no hay calificaciones
- Modulo BalanceDocumento49 páginasModulo BalanceAndreaSalasLalindeAún no hay calificaciones
- El Dia de La MarmotaDocumento5 páginasEl Dia de La MarmotaHeddy PalacioAún no hay calificaciones
- Primeras Poblaciones Indígenas en LatinoaméricaDocumento4 páginasPrimeras Poblaciones Indígenas en LatinoaméricaLixmelys VillarroelAún no hay calificaciones
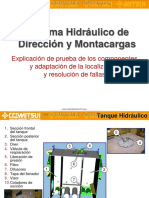
- Curso Sistema Hidraulico Direccion MontacargasDocumento33 páginasCurso Sistema Hidraulico Direccion MontacargasJesús Iván Mamani HuayhuaAún no hay calificaciones