También podría gustarte
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalDe EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalCalificación: 5 de 5 estrellas5/5 (4)
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Algebra Lineal VIRGINIODocumento0 páginasAlgebra Lineal VIRGINIORocío ArriagadaAún no hay calificaciones
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109De EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Aún no hay calificaciones
- METRADOS-Ing. Elena-Tema IIIDocumento173 páginasMETRADOS-Ing. Elena-Tema IIIjurgen dalguerri carrionAún no hay calificaciones
- Reglamentode EnchufesytomacorrientesDocumento33 páginasReglamentode EnchufesytomacorrientesSegundo Teofilo Cadenillas CabanillasAún no hay calificaciones
- Cinemática y dinámica de robots manipuladoresDe EverandCinemática y dinámica de robots manipuladoresAún no hay calificaciones
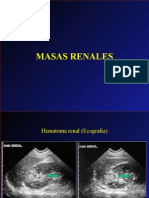
- Masas - Renales - Imagen DiagnósticaDocumento22 páginasMasas - Renales - Imagen DiagnósticaramonAún no hay calificaciones
- Cerebro Artificial: Dar a los robots la inteligencia para tareas complejasDe EverandCerebro Artificial: Dar a los robots la inteligencia para tareas complejasAún no hay calificaciones
- Creatividad, Master UnIrDocumento22 páginasCreatividad, Master UnIrAnna TorresAún no hay calificaciones
- PETS 022 Montaje de Escaleras MetalicasDocumento6 páginasPETS 022 Montaje de Escaleras MetalicasJennifer She PazAún no hay calificaciones
- Minería De Asteroides: ¿Será la minería de asteroides la próxima carrera dorada en el espacio?De EverandMinería De Asteroides: ¿Será la minería de asteroides la próxima carrera dorada en el espacio?Aún no hay calificaciones
- Modellistica Integrata Bikini Lezzi PUBLICACIONDocumento27 páginasModellistica Integrata Bikini Lezzi PUBLICACIONDeybby Luna LaredoAún no hay calificaciones
- Juegos didácticos de matemáticas para ESODocumento49 páginasJuegos didácticos de matemáticas para ESOCesar Carlos Sierra OreAún no hay calificaciones
- Práctica RobóticaDocumento11 páginasPráctica RobóticaRichi PérezAún no hay calificaciones
- Realidad Aumentada: ¿Es posible que la realidad aumentada tenga éxito donde la realidad virtual ha fallado?De EverandRealidad Aumentada: ¿Es posible que la realidad aumentada tenga éxito donde la realidad virtual ha fallado?Aún no hay calificaciones
- Informe #9 - Polarización de DiodosDocumento4 páginasInforme #9 - Polarización de DiodosNelson GuamánAún no hay calificaciones
- Crea Robot Con MATLABDocumento10 páginasCrea Robot Con MATLABAndre Williams Montenegro SalcedoAún no hay calificaciones
- Robotica Laboratorio 3Documento9 páginasRobotica Laboratorio 3ALEJANDRA CAROLINA ROQUE QUISPEAún no hay calificaciones
- Tema4robotica Cinematica Inve R DirectaDocumento32 páginasTema4robotica Cinematica Inve R DirectaGerson SalinasAún no hay calificaciones
- Cinematica Robots PDFDocumento50 páginasCinematica Robots PDFJuan ArevaloAún no hay calificaciones
- Diseño y Simulación Del Comportamiento de Un Robot Scara de 2 Grados de LibertadDocumento3 páginasDiseño y Simulación Del Comportamiento de Un Robot Scara de 2 Grados de LibertadDaniel_19938Aún no hay calificaciones
- Localización de robot móvil Ackerman usando EKFDocumento9 páginasLocalización de robot móvil Ackerman usando EKFOscar Giraldo CastilloAún no hay calificaciones
- 0002 SciPy Ecuaciones Diferenciales OrdinariasDocumento12 páginas0002 SciPy Ecuaciones Diferenciales OrdinariasHards HuancaAún no hay calificaciones
- Metodos Númericos en PythonDocumento12 páginasMetodos Númericos en PythonJuan Sebastian Quimbayo GomezAún no hay calificaciones
- Sistema MulticuerposDocumento34 páginasSistema MulticuerposChristian Josef Ugarte GaliciaAún no hay calificaciones
- Proyecto VictorDocumento7 páginasProyecto VictorEDUARDO ALCIBAR RAMIREZAún no hay calificaciones
- Robot ManipuladorDocumento5 páginasRobot ManipuladorEduardo CaballeroAún no hay calificaciones
- Simulación Cubli 20-sim MatlabDocumento16 páginasSimulación Cubli 20-sim MatlabEden Paz TadeoAún no hay calificaciones
- Articulo LibreDocumento12 páginasArticulo LibreCortazar CesarAún no hay calificaciones
- Taller 3Documento22 páginasTaller 3Juan David Diaz GarciaAún no hay calificaciones
- Modelo Dinamico Sistemas RoboticosDocumento111 páginasModelo Dinamico Sistemas RoboticosKyoukaSuigetsuAún no hay calificaciones
- Metodo de Runge Kutta 4 JMLDocumento18 páginasMetodo de Runge Kutta 4 JMLJosé Manuel Limachi Chávez100% (1)
- Avance ProyectoRoboticaDocumento11 páginasAvance ProyectoRoboticaEduardo Antonio Guzmán OrtizAún no hay calificaciones
- Puma Fase2Documento49 páginasPuma Fase2Danilo ColoradoAún no hay calificaciones
- Tarea 7 - Sistemas Digitales y PerifercosDocumento7 páginasTarea 7 - Sistemas Digitales y PerifercosbOrregOtheDemon PoisonAún no hay calificaciones
- Proyecto Klan 2PDocumento28 páginasProyecto Klan 2PMaria JoseAún no hay calificaciones
- Modelo Dinámico AgregadoDocumento11 páginasModelo Dinámico AgregadoLuis Antonio Leal LópezAún no hay calificaciones
- Cinematica inversa de un robot 4GDLDocumento18 páginasCinematica inversa de un robot 4GDLPaola Maribel GuamanAún no hay calificaciones
- Inetmatica Del Robot Metodos Geometrico y MTHDocumento16 páginasInetmatica Del Robot Metodos Geometrico y MTHIsaac AquinoAún no hay calificaciones
- Funciones Reales de Variable Real. CálculoDocumento59 páginasFunciones Reales de Variable Real. CálculoAmIn20122Aún no hay calificaciones
- Penduloinvertido1 PDFDocumento6 páginasPenduloinvertido1 PDFJulio BarreraAún no hay calificaciones
- Robótica herramientasDocumento11 páginasRobótica herramientasJesus Alexander Carreño PulidoAún no hay calificaciones
- Lab 9Documento16 páginasLab 9Jonathan Alvarado SilvaAún no hay calificaciones
- Id003 PDFDocumento6 páginasId003 PDFgusberAún no hay calificaciones
- Robotica Avance Practica 2Documento10 páginasRobotica Avance Practica 2MajoRiosAún no hay calificaciones
- Robot SumoDocumento10 páginasRobot Sumojose.cerrograndeAún no hay calificaciones
- Hoja de Problemas #1Documento2 páginasHoja de Problemas #1MijailCuba0% (2)
- Examen Robotica Unidad3Documento10 páginasExamen Robotica Unidad3alejandrocamposgarcia777Aún no hay calificaciones
- 1.2.20-Encoders y OdometríaDocumento6 páginas1.2.20-Encoders y OdometríaOrlando RuedaAún no hay calificaciones
- Laboratorio 05 - GRUPO ADocumento22 páginasLaboratorio 05 - GRUPO AEdwin Victorio EstebanAún no hay calificaciones
- EjercicioDocumento7 páginasEjercicioEdisson RamírezAún no hay calificaciones
- CLASE 1 Metodo de RaicesDocumento13 páginasCLASE 1 Metodo de RaicesPaul Antonio Rios MurrugarraAún no hay calificaciones
- Ecuac Difer Practica 0 15660Documento5 páginasEcuac Difer Practica 0 15660KATTYA YAMILETH ENCISO QUISPEAún no hay calificaciones
- IA-Robots Webots SimulaciónDocumento11 páginasIA-Robots Webots SimulaciónGerardo MonteroAún no hay calificaciones
- Lab 3 Dinámica Del Robot Del Robot MotomanDocumento9 páginasLab 3 Dinámica Del Robot Del Robot MotomanEd WaltAún no hay calificaciones
- GRUPO 100404 4-1 Programacion LinealDocumento25 páginasGRUPO 100404 4-1 Programacion Linealgerman_elidaAún no hay calificaciones
- Fourier Series LabDocumento14 páginasFourier Series LabJavier Rodriguez CruzAún no hay calificaciones
- Grupo 8 TF IMCDocumento10 páginasGrupo 8 TF IMCKevin RamónAún no hay calificaciones
- Oscilador de Van Der PolDocumento11 páginasOscilador de Van Der PolgarciaramirezalanraiAún no hay calificaciones
- Lab 1Documento4 páginasLab 1Jorge Daniel Vasquez VergaraAún no hay calificaciones
- Algoritmi de ReglareDocumento35 páginasAlgoritmi de ReglareMarius PlesaAún no hay calificaciones
- Practica Agente AspiradoraDocumento7 páginasPractica Agente AspiradoraYanai HidalgoAún no hay calificaciones
- Modelado de Sistemas Mecánicos, Fluidifico y EléctricosDocumento7 páginasModelado de Sistemas Mecánicos, Fluidifico y EléctricosKevin Paukr CordovaAún no hay calificaciones
- Métodos Analíticos de Análisis CinemáticoDocumento13 páginasMétodos Analíticos de Análisis CinemáticoAmIn20122Aún no hay calificaciones
- Robótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsDe EverandRobótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsAún no hay calificaciones
- Ascensor Espacial: Presionando el botón de un ascensor para viajar al cieloDe EverandAscensor Espacial: Presionando el botón de un ascensor para viajar al cieloAún no hay calificaciones
- Metodos de Resolucion Sistema de EcuacionesDocumento4 páginasMetodos de Resolucion Sistema de EcuacionesKarlitosman100% (1)
- Cronogramas Electivas III Periodo 48Documento2 páginasCronogramas Electivas III Periodo 48KarlitosmanAún no hay calificaciones
- Campo Magnetico, Estructura de Dominios, Curva de Histeresis, EtcDocumento21 páginasCampo Magnetico, Estructura de Dominios, Curva de Histeresis, EtcoazzambranoAún no hay calificaciones
- Algebra Lineal 2014Documento135 páginasAlgebra Lineal 2014rafaelreanoAún no hay calificaciones
- Novena Segundo DíaDocumento18 páginasNovena Segundo DíaKarlitosmanAún no hay calificaciones
- Detección de Líneas de CarrilDocumento11 páginasDetección de Líneas de CarrilKarlitosmanAún no hay calificaciones
- Practica4 VC PDFDocumento5 páginasPractica4 VC PDFKarlitosmanAún no hay calificaciones
- Cristobal Colon y Sus ViajesDocumento4 páginasCristobal Colon y Sus ViajesMoises Rojas AquiseAún no hay calificaciones
- Robots Laberinto Grupo EDocumento86 páginasRobots Laberinto Grupo EEliecer Emilio Carvajal SantosAún no hay calificaciones
- Apéndice ADocumento8 páginasApéndice AAnjher GustavoAún no hay calificaciones
- Circuito en General para ConectarDocumento9 páginasCircuito en General para ConectarKarlitosmanAún no hay calificaciones
- Ej Prog HaskellDocumento266 páginasEj Prog HaskellMarvin NavarroAún no hay calificaciones
- Cuadernos Energias Renovables para TodosDocumento20 páginasCuadernos Energias Renovables para Todosjuanca06Aún no hay calificaciones
- Movies MAtlabDocumento10 páginasMovies MAtlabLuis QuinoAún no hay calificaciones
- Piezas de LegoDocumento19 páginasPiezas de LegoKarlitosmanAún no hay calificaciones
- Diseno y Construccion de Un Taladro XYZDocumento56 páginasDiseno y Construccion de Un Taladro XYZKarlitosmanAún no hay calificaciones
- Divisor de TensiónDocumento2 páginasDivisor de TensiónKarlitosmanAún no hay calificaciones
- Sistemas Logicos DigitalesDocumento207 páginasSistemas Logicos DigitalesKarlitosmanAún no hay calificaciones
- Examen Encendidos Tzi TZH EEIDocumento2 páginasExamen Encendidos Tzi TZH EEIKarlitosmanAún no hay calificaciones
- Parte 1Documento19 páginasParte 1Carlos A. EvangelistaAún no hay calificaciones
- Denavit-Hartenberg: modelo geométrico de robotsDocumento1 páginaDenavit-Hartenberg: modelo geométrico de robotsLizeth BenavidesAún no hay calificaciones
- 07 ScadaDocumento8 páginas07 ScadaKarlitosmanAún no hay calificaciones
- Clasesderoboticafinal 131006175306 Phpapp02Documento51 páginasClasesderoboticafinal 131006175306 Phpapp02KarlitosmanAún no hay calificaciones
- Presentación 1Documento4 páginasPresentación 1KarlitosmanAún no hay calificaciones
- Consejo ECAC para Mecánicos - Terminología Del Sistema OBDII en FordDocumento2 páginasConsejo ECAC para Mecánicos - Terminología Del Sistema OBDII en FordKarlitosmanAún no hay calificaciones
- Arrays ClustersDocumento61 páginasArrays ClustersAvi Ramirez CervantesAún no hay calificaciones
- Repaso de 8Documento3 páginasRepaso de 8AndresCuellarAún no hay calificaciones
- Clase 1.0Documento42 páginasClase 1.0KarlitosmanAún no hay calificaciones
- Atestado Cholo Arturo 1Documento21 páginasAtestado Cholo Arturo 1Jhon VAoAún no hay calificaciones
- Chemayolic Interiores Ficha TecnicaDocumento5 páginasChemayolic Interiores Ficha TecnicaHoshino Lizzy Kuroineko MikadoAún no hay calificaciones
- Yeastar TG Series Datasheet EsDocumento2 páginasYeastar TG Series Datasheet EsErick VargasAún no hay calificaciones
- Metrados Acondicionar A InguilpataDocumento150 páginasMetrados Acondicionar A InguilpataHectorNuñezLopezAún no hay calificaciones
- Examen de Legislacion 5Documento3 páginasExamen de Legislacion 5Armando ChacónAún no hay calificaciones
- Símbolos TuberiasDocumento8 páginasSímbolos TuberiasdavidAún no hay calificaciones
- TEMA 1.concepto y Función 1docDocumento9 páginasTEMA 1.concepto y Función 1docmariapi_1984Aún no hay calificaciones
- Diseño Alcantarillado Pluvial PDFDocumento28 páginasDiseño Alcantarillado Pluvial PDFAndrew AlmonteAún no hay calificaciones
- Cuestionarios de Lengua y LiteraturaDocumento9 páginasCuestionarios de Lengua y LiteraturaErnst LgAún no hay calificaciones
- Lavado Clínico de Manos e Higiene de Manos CompressedDocumento36 páginasLavado Clínico de Manos e Higiene de Manos CompressedLuisa CamposAún no hay calificaciones
- Webquest CompletoDocumento55 páginasWebquest CompletoAldo RomanoAún no hay calificaciones
- Programa Balistica UNCA 2021Documento4 páginasPrograma Balistica UNCA 2021Julius RibAún no hay calificaciones
- Practica CalificadaDocumento4 páginasPractica CalificadaRoder Arnol Torre Salvador100% (1)
- Buen RepasoDocumento197 páginasBuen Repasonetinho210Aún no hay calificaciones
- ReporteDocumento6 páginasReporteJuan David Olarte LoaizaAún no hay calificaciones
- Simulacion de Procesos Quimicos: Universidad Nacional Del Altiplano Facultad de Ingenieria QuimicaDocumento19 páginasSimulacion de Procesos Quimicos: Universidad Nacional Del Altiplano Facultad de Ingenieria Quimicaelia melayde rosello ccasaAún no hay calificaciones
- Beethoven Chespirito PDFDocumento1 páginaBeethoven Chespirito PDFsalsanamaAún no hay calificaciones
- Alexis Arturo Cardona Munguia: Informacion PersonalDocumento3 páginasAlexis Arturo Cardona Munguia: Informacion PersonalMG TRUCKING COMPANYAún no hay calificaciones
- AIR Virtual InstrumentsDocumento492 páginasAIR Virtual InstrumentsdatttAún no hay calificaciones
- Evidencia 4 Taller Orientar El Montaje Del CampamentoDocumento10 páginasEvidencia 4 Taller Orientar El Montaje Del CampamentointernetAún no hay calificaciones
- Reporte laboral con 10 relaciones laboralesDocumento2 páginasReporte laboral con 10 relaciones laboralesJosé Maria BrownAún no hay calificaciones
- Seminario Anomalias Del Aparato Genital Femenino Katherine Leiva SalazarDocumento39 páginasSeminario Anomalias Del Aparato Genital Femenino Katherine Leiva SalazarIrina Surco RodríguezAún no hay calificaciones