También podría gustarte
- Contratación Outsourcing PDFDocumento21 páginasContratación Outsourcing PDFLuis ArmijoAún no hay calificaciones
- Propulsión HidrodinámicaDocumento20 páginasPropulsión HidrodinámicaAVAún no hay calificaciones
- Glenn GouldDocumento39 páginasGlenn GouldViorel TudorAún no hay calificaciones
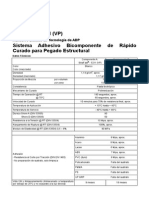
- SikaFast 5211Documento3 páginasSikaFast 5211Guillermo Jose Escorcha RodriguezAún no hay calificaciones
- Diseño Estructural de Fundaciones Superficiales (Tutorial Software Safe V.Documento43 páginasDiseño Estructural de Fundaciones Superficiales (Tutorial Software Safe V.Guillermo Jose Escorcha RodriguezAún no hay calificaciones
- Epaguiaconstructor 120830080749 Phpapp02Documento228 páginasEpaguiaconstructor 120830080749 Phpapp02Manuelillo LopezAún no hay calificaciones
- Teoria de Placas y Laminas Capitulos 01 Al 10Documento199 páginasTeoria de Placas y Laminas Capitulos 01 Al 10Guillermo Jose Escorcha RodriguezAún no hay calificaciones
- Clases CaudalDocumento29 páginasClases CaudalGuillermo Jose Escorcha RodriguezAún no hay calificaciones
- Ficha Tecnica Expo ConstruccionDocumento2 páginasFicha Tecnica Expo ConstruccionGuillermo Jose Escorcha RodriguezAún no hay calificaciones
- Introducion Trabajo de GrometriaDocumento5 páginasIntroducion Trabajo de GrometriaBrian Montes PinedoAún no hay calificaciones
- Infografia Foda Ok PDFDocumento1 páginaInfografia Foda Ok PDFLeo Saavedra100% (1)
- FUNCIONESDocumento3 páginasFUNCIONESKarlaAún no hay calificaciones
- Ejercicio Intercambiador de CalorDocumento2 páginasEjercicio Intercambiador de CalorRicardo GrajalesAún no hay calificaciones
- Conclusiones AguirreDocumento2 páginasConclusiones AguirreErwin Tole BarragánAún no hay calificaciones
- Estudio de Impacto Ambiental de La Línea de Transmisión PomacochaDocumento3 páginasEstudio de Impacto Ambiental de La Línea de Transmisión PomacochaRudy PeñaAún no hay calificaciones
- Minerales Orgánicos en La Alimentación de Pollos de EngordeDocumento4 páginasMinerales Orgánicos en La Alimentación de Pollos de EngordeÔger Ernesto D. Aguila SotoAún no hay calificaciones
- Actividad Sobre Los MicroorganismosDocumento8 páginasActividad Sobre Los MicroorganismosMery BenitoAún no hay calificaciones
- Tarea 3 Gestion HumanaDocumento7 páginasTarea 3 Gestion HumanaMac FerrerasAún no hay calificaciones
- NotCo - Examen Gestión OficialDocumento42 páginasNotCo - Examen Gestión OficialMATÍAS RAMÓN INFANTE MIDDLETONAún no hay calificaciones
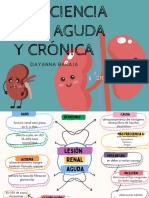
- RenalDocumento15 páginasRenalDayanna BarajaAún no hay calificaciones
- Libro Estudios Sobre Gestión Pública - IsBN OnlineDocumento268 páginasLibro Estudios Sobre Gestión Pública - IsBN OnlineAndres Eduardo AlvarezAún no hay calificaciones
- Presentación Valores EspiritualesDocumento3 páginasPresentación Valores Espiritualesleamoral852Aún no hay calificaciones
- Contraindicaciones de La TerapiaDocumento2 páginasContraindicaciones de La TerapiaLiseth HumalaAún no hay calificaciones
- El Papel de Las Humanidades en La Sociedad de Hoy en Día-1Documento5 páginasEl Papel de Las Humanidades en La Sociedad de Hoy en Día-1SANTIAGO SALAZAR ARISTIZABALAún no hay calificaciones
- Ciencias SocialesDocumento13 páginasCiencias SocialesKeyling RamosAún no hay calificaciones
- PruebaDocumento6 páginasPruebaAriana GibelliAún no hay calificaciones
- Tenologia FarmaceuticaDocumento4 páginasTenologia FarmaceuticaHéctor BalmoriAún no hay calificaciones
- Sentencia c863 de 2012Documento2 páginasSentencia c863 de 2012juliands69Aún no hay calificaciones
- GL Datos Tecnicos ESDocumento2 páginasGL Datos Tecnicos ESOmar CuevaAún no hay calificaciones
- MAC - Matriz de Riesgos Felipe Alvarez MAYO 26Documento5 páginasMAC - Matriz de Riesgos Felipe Alvarez MAYO 26Jhoana MartinezAún no hay calificaciones
- Analisis de Pelicula Los Amantes Del Circulo Polar OJPDocumento3 páginasAnalisis de Pelicula Los Amantes Del Circulo Polar OJPHector Hdz BenítezAún no hay calificaciones
- Generalidades de La Biblica CatolicaDocumento18 páginasGeneralidades de La Biblica CatolicaEduard Veloz100% (1)
- Qué Significa Soñar Con CazarrecompensasDocumento2 páginasQué Significa Soñar Con CazarrecompensasTarot sin Gabinete Atiendo PersonalmenteAún no hay calificaciones
- Actividades Retroalimentación OctavoDocumento4 páginasActividades Retroalimentación OctavoMARJORIE CONRADE CRESPOAún no hay calificaciones
- Volumenes de TransitoDocumento31 páginasVolumenes de TransitoDiego Madero100% (2)
- Escuelas EconomicasDocumento1 páginaEscuelas Economicaswamararu.yucunaAún no hay calificaciones