También podría gustarte
- Manipulación de cargas con puentes-grúa y polipastos. IEXD0108De EverandManipulación de cargas con puentes-grúa y polipastos. IEXD0108Aún no hay calificaciones
- Ficha Tecnica Peel 2 CADDocumento1 páginaFicha Tecnica Peel 2 CADJohnny CcanchiAún no hay calificaciones
- Cables Especializados Infraestructura y Construccion Mex PDFDocumento102 páginasCables Especializados Infraestructura y Construccion Mex PDFWashington MazziniAún no hay calificaciones
- Ventilador industrial AMEFDocumento1 páginaVentilador industrial AMEFcanaimaAún no hay calificaciones
- SP QSK23Documento129 páginasSP QSK23Karlis Orozco SanchezAún no hay calificaciones
- HtasDocumento98 páginasHtascfll20110% (1)
- NTC 4039 Electrodo Tubular para Soldar Por Arco Eléctrico Aceros Bajamente Aleados PDFDocumento32 páginasNTC 4039 Electrodo Tubular para Soldar Por Arco Eléctrico Aceros Bajamente Aleados PDFjavoidea696526Aún no hay calificaciones
- Donaldson Torit General BrochureDocumento24 páginasDonaldson Torit General BrochureDiego VicenteAún no hay calificaciones
- Inf-Rt-Priasac 201-08-2020 D6 PDFDocumento1 páginaInf-Rt-Priasac 201-08-2020 D6 PDFDavid RodriguezAún no hay calificaciones
- 3 Mantenimiento PreventivoDocumento62 páginas3 Mantenimiento PreventivoAlonso FernandoAún no hay calificaciones
- Herramientas de Taller 2022Documento9 páginasHerramientas de Taller 2022el kunpaAún no hay calificaciones
- Grupo de PreciosDocumento34 páginasGrupo de PreciosnelsonAún no hay calificaciones
- Borna Terminal 350 KcmilDocumento4 páginasBorna Terminal 350 KcmilJhamilton Troncoso AraqueAún no hay calificaciones
- Abrasivos NortonDocumento72 páginasAbrasivos NortonDarwin Barra TorresAún no hay calificaciones
- Catalogo Optibeltfajas IndustrialesDocumento84 páginasCatalogo Optibeltfajas Industrialesalrich85Aún no hay calificaciones
- Catalogo - Productos - TTM (v10-01-07)Documento29 páginasCatalogo - Productos - TTM (v10-01-07)romAún no hay calificaciones
- Producto: EXCAVATOR Modelo: 385C L Excavator Sbe Configuración: 385C L Excavator SBE00001-UP (MACHINE) POWERED BY C-18 EngineDocumento4 páginasProducto: EXCAVATOR Modelo: 385C L Excavator Sbe Configuración: 385C L Excavator SBE00001-UP (MACHINE) POWERED BY C-18 Engineantonio carrizoAún no hay calificaciones
- Cojinetes CatDocumento2 páginasCojinetes CatDiego VicenteAún no hay calificaciones
- Brochure Centro de Manufacturas Sanfranciscomostazal PDFDocumento7 páginasBrochure Centro de Manufacturas Sanfranciscomostazal PDFCesar Antonio Mancilla EscobarAún no hay calificaciones
- Alambre tubular de alta resistencia al impactoDocumento1 páginaAlambre tubular de alta resistencia al impactowinrorroAún no hay calificaciones
- Ntp-940 W-Ropa para El FrioDocumento6 páginasNtp-940 W-Ropa para El FrioAlicia Martinez SerranoAún no hay calificaciones
- Aceite Sintético para Mandos Finales y Ejes (FDAO Syn) PRODUCTOS Y SERVICIOS DE MANTENIMIENTO. PSDocumento2 páginasAceite Sintético para Mandos Finales y Ejes (FDAO Syn) PRODUCTOS Y SERVICIOS DE MANTENIMIENTO. PSOscarAún no hay calificaciones
- Sesa Systems 2021Documento312 páginasSesa Systems 2021ANDRES ZAMORAAún no hay calificaciones
- 1.2.2. Pm2 (Español) OkDocumento32 páginas1.2.2. Pm2 (Español) OkMoises Melendez RodriguezAún no hay calificaciones
- Eutectic ChutesDocumento4 páginasEutectic ChutesabdonmendozaAún no hay calificaciones
- Construcción y manejo de garruchas para transporte agrícolaDocumento28 páginasConstrucción y manejo de garruchas para transporte agrícolaYurany GrisalesAún no hay calificaciones
- Material Del Estudiante II Parte 793FDocumento118 páginasMaterial Del Estudiante II Parte 793Fmarcelo cuelloAún no hay calificaciones
- CaterDocumento5 páginasCaterViviana Aristizabal Giraldo89Aún no hay calificaciones
- Diseño tubular optimizado para mastil 49HRDocumento7 páginasDiseño tubular optimizado para mastil 49HReddyfredy100% (1)
- Prueba de Motores 2Documento3 páginasPrueba de Motores 2Space Diseño IndustrialAún no hay calificaciones
- ssbp4987 48 03 All PDFDocumento1185 páginasssbp4987 48 03 All PDFemiliojelvesAún no hay calificaciones
- Formato de Entrega Tecnica Motor 2Documento2 páginasFormato de Entrega Tecnica Motor 2XTREME_10Aún no hay calificaciones
- MarpossDocumento144 páginasMarpossEdgarRdz13100% (1)
- Características y aplicaciones de las galgas extensiométricasDocumento13 páginasCaracterísticas y aplicaciones de las galgas extensiométricasVictorAvilaAún no hay calificaciones
- PENTAX CatalogoDocumento14 páginasPENTAX CatalogoJimmy Cueva RomeroAún no hay calificaciones
- Cat Deo PDFDocumento2 páginasCat Deo PDFLuis Fernando Vasquez RamosAún no hay calificaciones
- Estudio-Carpas - pdfCARPAS TEMPORALES PDFDocumento38 páginasEstudio-Carpas - pdfCARPAS TEMPORALES PDFJUAN IGNACIO RODRIGUEZ VEGA100% (2)
- BancoEUIDocumento11 páginasBancoEUIAriel ChoqueAún no hay calificaciones
- 1075 PDFDocumento2 páginas1075 PDFMiguel PulidoAún no hay calificaciones
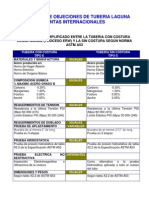
- Comparativo tubería ERW vs sin costura ASTM A53Documento7 páginasComparativo tubería ERW vs sin costura ASTM A53valpe12Aún no hay calificaciones
- Aceros Grado HerramientaDocumento26 páginasAceros Grado HerramientaValeria NarváezAún no hay calificaciones
- Reporte Sostenibilidad 2020Documento109 páginasReporte Sostenibilidad 2020Yohiss Lazo TerronesAún no hay calificaciones
- Prersentacion Caex 930-E 3y4 CzoDocumento227 páginasPrersentacion Caex 930-E 3y4 CzoPaula Tapia AguilarAún no hay calificaciones
- Cable Eléctrico para Mina Anaconda PDFDocumento4 páginasCable Eléctrico para Mina Anaconda PDFRony CrisAún no hay calificaciones
- Normas de Seguridad de Equipos de SoldaduraDocumento4 páginasNormas de Seguridad de Equipos de SoldaduraArisa SuzyAún no hay calificaciones
- SensoresDocumento12 páginasSensoresMiguel Alberto Garcia ArredondoAún no hay calificaciones
- Brochure Kansha Group PDFDocumento42 páginasBrochure Kansha Group PDFFrancisco Caceda QuispeAún no hay calificaciones
- 992K PIN de Boom InstalarDocumento10 páginas992K PIN de Boom InstalarFranquAún no hay calificaciones
- Electroerosión por hilo: corte fino con hilo metálicoDocumento9 páginasElectroerosión por hilo: corte fino con hilo metálicojuanAún no hay calificaciones
- Planchas Bimetalicas PRDDocumento18 páginasPlanchas Bimetalicas PRDCharqAún no hay calificaciones
- 8018 C 1Documento1 página8018 C 1Alejandro Esteban Chelen ParraAún no hay calificaciones
- Exatub E81t1-Ni1 PDFDocumento1 páginaExatub E81t1-Ni1 PDFchechar10Aún no hay calificaciones
- Planilla CrowdDocumento7 páginasPlanilla Crowdcynthia rojasAún no hay calificaciones
- Manual de Maquina ATOMIZADORDocumento9 páginasManual de Maquina ATOMIZADORLuis Zapata CardenasAún no hay calificaciones
- Es Acs800 02 HW F ScreenresDocumento158 páginasEs Acs800 02 HW F ScreenresPepe FrancoAún no hay calificaciones
- Oferta Económica Doc. A B C y DDocumento158 páginasOferta Económica Doc. A B C y DEmpresa ConstructoraAún no hay calificaciones
- Hoja de Seguridad - Pintura Amarillo CatDocumento11 páginasHoja de Seguridad - Pintura Amarillo CatMaria Fernanda Morales ArceAún no hay calificaciones
- LME-30–01–02 Criterios inspección caja eje T282CDocumento15 páginasLME-30–01–02 Criterios inspección caja eje T282Ccarlos colinaAún no hay calificaciones
- Tolerancia de CorteDocumento1 páginaTolerancia de CorteKmilo PeralthaAún no hay calificaciones
- Equipos de Mantenimiento de MaterialesDocumento13 páginasEquipos de Mantenimiento de MaterialesJuan SanchezAún no hay calificaciones
- Jovenes drogas 90Documento383 páginasJovenes drogas 90Alberto Domínguez MartínezAún no hay calificaciones
- Arduino Drone AndroidDocumento85 páginasArduino Drone AndroidOsmar Gabriel PeñalozaAún no hay calificaciones
- Temario Galpón Con Armadura (LRDF) 1-2017Documento4 páginasTemario Galpón Con Armadura (LRDF) 1-2017Osmar Gabriel PeñalozaAún no hay calificaciones
- Clase 13.2 - Comunicaciones IndustrialesDocumento10 páginasClase 13.2 - Comunicaciones IndustrialesOsmar Gabriel PeñalozaAún no hay calificaciones
- Medición temperatura sensores termopares AD595 MATLABDocumento6 páginasMedición temperatura sensores termopares AD595 MATLABAlan RamAún no hay calificaciones
- CINEMÁTICADocumento26 páginasCINEMÁTICAOsmar Gabriel PeñalozaAún no hay calificaciones
- Hie MesaDocumento22 páginasHie Mesalucas.barravaiteAún no hay calificaciones
- Tomo 1 CaratulaDocumento1 páginaTomo 1 CaratulaPercy RobertAún no hay calificaciones
- Temario Galpón Con Armadura (LRDF) 1-2017Documento4 páginasTemario Galpón Con Armadura (LRDF) 1-2017Osmar Gabriel PeñalozaAún no hay calificaciones
- Art RitisDocumento3 páginasArt RitisOsmar Gabriel PeñalozaAún no hay calificaciones
- Links LibrosDocumento3 páginasLinks LibrosRobinson Chiran AcostaAún no hay calificaciones
- (Carlos Pardo) - Flujo CompresibleDocumento22 páginas(Carlos Pardo) - Flujo CompresibleOsmar Gabriel PeñalozaAún no hay calificaciones
- Accesorios NeuDocumento16 páginasAccesorios NeuOsmar Gabriel PeñalozaAún no hay calificaciones
- Quemadores de Gas Con Premescla de Aire Arrastrado Por El ChorroDocumento10 páginasQuemadores de Gas Con Premescla de Aire Arrastrado Por El ChorroMarcelo BraconiAún no hay calificaciones
- Minicurso en C Xc8Documento1 páginaMinicurso en C Xc8Osmar Gabriel PeñalozaAún no hay calificaciones
- SÍMBOLODocumento1 páginaSÍMBOLOOsmar Gabriel PeñalozaAún no hay calificaciones
- Norma Din AceroDocumento71 páginasNorma Din AceroJorge Ignacio Mora Silva71% (7)
- Calderos 3Documento13 páginasCalderos 3Osmar Gabriel PeñalozaAún no hay calificaciones
- Modelado Matematico PDFDocumento541 páginasModelado Matematico PDFEriika SeaAún no hay calificaciones
- Simbologia UNE2Documento1 páginaSimbologia UNE2Osmar Gabriel PeñalozaAún no hay calificaciones
- Una Sencilla Regla para Predimensionar Pilares de HormigónDocumento2 páginasUna Sencilla Regla para Predimensionar Pilares de HormigónjowacocoAún no hay calificaciones
- Física bloque 3Documento4 páginasFísica bloque 3Efrain Meza ValdezAún no hay calificaciones
- Apuntes de Control PidDocumento134 páginasApuntes de Control Pidpaulmejiaglz100% (7)
- Norma Din AceroDocumento71 páginasNorma Din AceroJorge Ignacio Mora Silva71% (7)
- Manual RefrigerDocumento264 páginasManual RefrigerOsmar Gabriel PeñalozaAún no hay calificaciones
- Aire AcondicionadoDocumento2 páginasAire AcondicionadoOsmar Gabriel PeñalozaAún no hay calificaciones
- Constantes Fisicas y QuimicasDocumento4 páginasConstantes Fisicas y Quimicasjose davidAún no hay calificaciones
- E17 OpticaDocumento1 páginaE17 OpticaEfectobioAún no hay calificaciones
- Dibujo en Hormogon ArmadoDocumento13 páginasDibujo en Hormogon Armadolovis_200Aún no hay calificaciones
- Calores de FormacionDocumento12 páginasCalores de FormacionJose Maria GattoAún no hay calificaciones
- Tema 4 Parte 1Documento9 páginasTema 4 Parte 1MANUEL CHICOTEAún no hay calificaciones
- Dioxinas y FluranosDocumento4 páginasDioxinas y FluranosPedro DueñasAún no hay calificaciones
- El TabernáculoDocumento117 páginasEl Tabernáculojamer antonio canchila perezAún no hay calificaciones
- CP Calculo Integral - 2021-1Documento9 páginasCP Calculo Integral - 2021-1Sofia AragonAún no hay calificaciones
- Texto Refundido Plan Especial Centro Historico Julio 2000Documento102 páginasTexto Refundido Plan Especial Centro Historico Julio 2000Transparencia Local Úbeda50% (2)
- Normativa Ambiental EnergéticaDocumento7 páginasNormativa Ambiental EnergéticaDiegoAún no hay calificaciones
- KFB40Documento1 páginaKFB40Eliana PallaresAún no hay calificaciones
- Presentacion Defensa de Tesis ESPE 2018Documento40 páginasPresentacion Defensa de Tesis ESPE 2018Fer NavaAún no hay calificaciones
- Introducción a la Mineragrafía: Identificación de minerales opacos mediante métodos cualitativosDocumento6 páginasIntroducción a la Mineragrafía: Identificación de minerales opacos mediante métodos cualitativosJose Cartagena ZubietaAún no hay calificaciones
- Presentacion Aguas Residuales Seminario Acotepac 2015Documento55 páginasPresentacion Aguas Residuales Seminario Acotepac 2015proyectos plantasAún no hay calificaciones
- Ficha Técnica Persona Bajo La LluviaDocumento3 páginasFicha Técnica Persona Bajo La LluviaRicardo Sol100% (1)
- Métodos científicos clasificaciónDocumento2 páginasMétodos científicos clasificaciónJulio Jesus Vc79% (39)
- Materiales CerámicosDocumento4 páginasMateriales Cerámicosvalentin gimenezAún no hay calificaciones
- NTC5610 PDFDocumento9 páginasNTC5610 PDFKmilo Lied100% (1)
- Circuito RLDocumento7 páginasCircuito RLdecapitadorAún no hay calificaciones
- Problematica Ambiental TianguistengoDocumento6 páginasProblematica Ambiental TianguistengoMartínez Blando María FernandaAún no hay calificaciones
- Discriminación de La Dirección en La Cual Viene El SonidoDocumento3 páginasDiscriminación de La Dirección en La Cual Viene El SonidoHugo Sánchez RogelAún no hay calificaciones
- Gran Lista de Palabras Homófonas en InglésDocumento6 páginasGran Lista de Palabras Homófonas en InglésIván Alberto67% (3)
- 2 Examen Quincenal de CompreDocumento1 página2 Examen Quincenal de CompreGely LópezAún no hay calificaciones
- 1.hoja de Cálculo Sifon InvertidoDocumento7 páginas1.hoja de Cálculo Sifon InvertidoVictor OcampoAún no hay calificaciones
- Yesos DentalesDocumento29 páginasYesos DentalesAracely HernandezAún no hay calificaciones
- Antología Poemas LIT ACTUAL PDFDocumento6 páginasAntología Poemas LIT ACTUAL PDFtareasdeclaseAún no hay calificaciones
- Diseño de Una Minicentral Solar en Las Pampas de Puerto Eten.Documento31 páginasDiseño de Una Minicentral Solar en Las Pampas de Puerto Eten.juanAún no hay calificaciones
- Investigadora Universitaria Desarrolla Biopelícula A Base de Almidón Extraído Del ChayoteDocumento1 páginaInvestigadora Universitaria Desarrolla Biopelícula A Base de Almidón Extraído Del ChayoteDvJosuéAún no hay calificaciones
- AMORC - La Herencia Secreta (6a Edicion)Documento39 páginasAMORC - La Herencia Secreta (6a Edicion)Frater Osiris100% (9)
- BioplasticoDocumento5 páginasBioplasticoAylin F. HernándezAún no hay calificaciones
- Árboles de La RegiónDocumento4 páginasÁrboles de La RegiónyinnerAún no hay calificaciones
- Sintesis de Mariologia, FinalDocumento2 páginasSintesis de Mariologia, FinalJuan Pablo LinaresAún no hay calificaciones
- Examen de confección de vestidos y la industria textilDocumento5 páginasExamen de confección de vestidos y la industria textilRocio RMAún no hay calificaciones
- Internado GYODocumento17 páginasInternado GYOdark_mayiAún no hay calificaciones