También podría gustarte
- EXAMEN PARCIALControl InteligenteDocumento9 páginasEXAMEN PARCIALControl InteligenteJheral Ramírez NavarroAún no hay calificaciones
- Laboratorio-Sistemas Control Digital-3 PDFDocumento5 páginasLaboratorio-Sistemas Control Digital-3 PDFBoris Benites CalenzaniAún no hay calificaciones
- Tarea Micro y NanoDocumento3 páginasTarea Micro y NanoDARWIN DARIUS USCCACHI VALENCIAAún no hay calificaciones
- Modelado y simulación de un horno tubularDocumento27 páginasModelado y simulación de un horno tubularbrayan vilela villegas100% (1)
- CuestionarioDocumento10 páginasCuestionario25 Olmedo RenatoAún no hay calificaciones
- Paralelismo e Incremento de PrestacionesDocumento5 páginasParalelismo e Incremento de PrestacionesSteven Vega MedinaAún no hay calificaciones
- Guia IV - Sistemas de Control I NewDocumento6 páginasGuia IV - Sistemas de Control I NewYeremi DavilaAún no hay calificaciones
- Laboratorio MicroelectronicaDocumento2 páginasLaboratorio Microelectronicaageha28Aún no hay calificaciones
- Nicanor Raul Benites Saravia - FieeDocumento5 páginasNicanor Raul Benites Saravia - FieeWalther CJAún no hay calificaciones
- Labo1 SCD 2020B FinalDocumento14 páginasLabo1 SCD 2020B FinalQuino B. JeffryAún no hay calificaciones
- Simulación de funciones de muestreo y tren de impulsos en OctaveDocumento12 páginasSimulación de funciones de muestreo y tren de impulsos en OctaveLeonardo Ponce GarciaAún no hay calificaciones
- Laboratorio3 Control DigitalDocumento16 páginasLaboratorio3 Control DigitalCésar Augusto Q. LaverianoAún no hay calificaciones
- Solucionario 1er Practica Calificada PDFDocumento5 páginasSolucionario 1er Practica Calificada PDFpepefex2612Aún no hay calificaciones
- Lab3 CONTROL DIGTAL 2020ADocumento3 páginasLab3 CONTROL DIGTAL 2020ACésar Jesús AlcaláAún no hay calificaciones
- Spasado15-2 ELT2590Documento35 páginasSpasado15-2 ELT2590Elvis C CAún no hay calificaciones
- Curso PDSDocumento11 páginasCurso PDSElvis Justo Vilca CárdenasAún no hay calificaciones
- INFORME1Documento5 páginasINFORME1Felipe SanchezAún no hay calificaciones
- Prepa 11Documento6 páginasPrepa 11Kevin CarpioAún no hay calificaciones
- Sistema de Adquisicion, Supervicion y Monitoreo de Datos (Scada)Documento24 páginasSistema de Adquisicion, Supervicion y Monitoreo de Datos (Scada)Juanka Montero100% (1)
- Informe Final N2-Controlador PIDDocumento10 páginasInforme Final N2-Controlador PIDMichael Infantes HuacancaAún no hay calificaciones
- Reporte de Filtro Digital de SeñalesDocumento24 páginasReporte de Filtro Digital de SeñalesFab HezAún no hay calificaciones
- Filtros pasivos de primer ordenDocumento7 páginasFiltros pasivos de primer ordenDufainderBedoya100% (2)
- Modelado y Simulacion - Robot 2 Grados de LibertadDocumento7 páginasModelado y Simulacion - Robot 2 Grados de LibertadLalo FrankAún no hay calificaciones
- Bandas de FrecuenciaDocumento11 páginasBandas de FrecuenciaCarlos Diaz CamposAún no hay calificaciones
- Informe Final Laboratorio 3 CompensadorDocumento6 páginasInforme Final Laboratorio 3 CompensadorOrlando Bustamante FernandezAún no hay calificaciones
- Laboratorio 3 SeñalesDocumento5 páginasLaboratorio 3 SeñalesRuben AllendeAún no hay calificaciones
- Laboratorio de FiltrosDocumento17 páginasLaboratorio de FiltrosLuis Mendoza100% (1)
- ModuladoresAMFMDocumento10 páginasModuladoresAMFMHector MejiasAún no hay calificaciones
- Laboratorio 3 MicroelectronicaDocumento8 páginasLaboratorio 3 MicroelectronicaAlvaro SegoviaAún no hay calificaciones
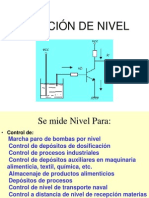
- Medición de NivelDocumento37 páginasMedición de NivelEDdy Santiago Valle ArceAún no hay calificaciones
- Ejercicios de SimulinkDocumento13 páginasEjercicios de SimulinkEduardo Briones ZambranoAún no hay calificaciones
- LABORATORIO 2 Control DigitalDocumento8 páginasLABORATORIO 2 Control DigitaljorgeAún no hay calificaciones
- Ocw Uc3m-Tc PDFDocumento359 páginasOcw Uc3m-Tc PDFmaria garciaAún no hay calificaciones
- Onda Senoidal Con PIC18f4550Documento5 páginasOnda Senoidal Con PIC18f4550Phillip Brown0% (1)
- Matlab Transformada ZDocumento7 páginasMatlab Transformada ZJ.A. CalvilloAún no hay calificaciones
- Informe Control Digital Control de VelocidadDocumento14 páginasInforme Control Digital Control de VelocidadMarcelo Alejandro Alvarez LunaAún no hay calificaciones
- Manual de Prácticas de Control DigitalDocumento51 páginasManual de Prácticas de Control DigitalNoel FavelaAún no hay calificaciones
- Radioenlace LimaDocumento23 páginasRadioenlace LimaGrecia Melissa Dionicio AntunezAún no hay calificaciones
- Aula 5 Filtros Digitales FIRDocumento41 páginasAula 5 Filtros Digitales FIRmar_a_zul25Aún no hay calificaciones
- Glosario de Terminos Sistemas EmbebidosDocumento7 páginasGlosario de Terminos Sistemas EmbebidoscharryperdomoAún no hay calificaciones
- Capitulo3 PROCESADORES-SUPERESCALARESDocumento143 páginasCapitulo3 PROCESADORES-SUPERESCALARESPatty PatAún no hay calificaciones
- Filtros y Diagrama de BodeDocumento18 páginasFiltros y Diagrama de Bodeカレン趙Aún no hay calificaciones
- Filtro Analogico Pasa AltoDocumento11 páginasFiltro Analogico Pasa AltoTRUJILLO ZULUETA RENATO ANGELOAún no hay calificaciones
- Informe N°1 de Comunicacion Digital OficialDocumento27 páginasInforme N°1 de Comunicacion Digital OficialDiego FloresAún no hay calificaciones
- Lab 2Documento8 páginasLab 2Jarlin Ipushima MorenoAún no hay calificaciones
- Tratamiento de señales biomédicas y ruidoDocumento4 páginasTratamiento de señales biomédicas y ruidoEric Medina PortilloAún no hay calificaciones
- Problemas 2Documento34 páginasProblemas 2Victor Andre0% (1)
- Antena L Invertida - Marco TeoricoDocumento4 páginasAntena L Invertida - Marco TeoricoAldair Bravo YarlequeAún no hay calificaciones
- 05 - Respuesta en El Tiempo de Un Sistema de Control ELTDocumento19 páginas05 - Respuesta en El Tiempo de Un Sistema de Control ELTanderdaAún no hay calificaciones
- Controladores Lógicos Programables AID-1205Documento10 páginasControladores Lógicos Programables AID-1205Marco Alonso GarcíaAún no hay calificaciones
- Redes IndustrialesDocumento3 páginasRedes IndustrialesJOSUE MARSHALL TINOCO VILLAAún no hay calificaciones
- Laboratorio de Tectonologia de Las Energias RenovablesDocumento19 páginasLaboratorio de Tectonologia de Las Energias Renovablesluis escobedoAún no hay calificaciones
- Control DigitalDocumento10 páginasControl DigitalYoset Fran Mamani AyalaAún no hay calificaciones
- Examen Comunicaciones DigitalesDocumento2 páginasExamen Comunicaciones DigitalesJessi CruelAún no hay calificaciones
- Lab N°4 - CPBMDocumento10 páginasLab N°4 - CPBMcristhianAún no hay calificaciones
- Transmisión líneas y antenas examenDocumento3 páginasTransmisión líneas y antenas examenDiego LazoAún no hay calificaciones
- DAC0800Documento4 páginasDAC0800Victor Cardenas Cuevas50% (2)
- Control digital de motor CC-reductoraDocumento4 páginasControl digital de motor CC-reductoraluis angel gonzalez100% (1)
- Lab 2 - CONTROL DE VELOCIDAD DE UN MOTOR DCDocumento17 páginasLab 2 - CONTROL DE VELOCIDAD DE UN MOTOR DCCAMILO ANDRÉS HERNÁNDEZ STERLINGAún no hay calificaciones
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoDe EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoCalificación: 5 de 5 estrellas5/5 (1)
- Laborat 2 PDFDocumento7 páginasLaborat 2 PDFJuan FieeAún no hay calificaciones
- 877-12-r Directiva 003-2012-r Presentacion Planes de Tesis y Trabajos de Tesis-Anexo-1Documento17 páginas877-12-r Directiva 003-2012-r Presentacion Planes de Tesis y Trabajos de Tesis-Anexo-1Meliza En EmergenciaAún no hay calificaciones
- Fabricacion Antena 14 DbiDocumento5 páginasFabricacion Antena 14 DbiJuan FieeAún no hay calificaciones
- Comandos MatlabDocumento2 páginasComandos MatlabJuan Carlos Gonzales ArosteAún no hay calificaciones
- Contenido Minimo Memoria DescriptivaDocumento1 páginaContenido Minimo Memoria DescriptivaJuan FieeAún no hay calificaciones
- EEM casero para el tratamiento de doloresDocumento8 páginasEEM casero para el tratamiento de doloresJuan FieeAún no hay calificaciones
- Labort Sistemas DigitalesDocumento25 páginasLabort Sistemas DigitalesJuan FieeAún no hay calificaciones
- ModelosDinámicosSEDocumento31 páginasModelosDinámicosSEJuan FieeAún no hay calificaciones
- Primer Examen-Procesos Estocasticos 2011-ADocumento2 páginasPrimer Examen-Procesos Estocasticos 2011-AJuan FieeAún no hay calificaciones
- Circuitos y Sistemas DigitalesDocumento175 páginasCircuitos y Sistemas DigitalesCarlos Espinoza100% (11)
- Practica 04Documento2 páginasPractica 04Manuel Eduardo Estrella PolancoAún no hay calificaciones
- Termostato Digital Con Pic 16f877aDocumento13 páginasTermostato Digital Con Pic 16f877aJuan FieeAún no hay calificaciones
- Reglamento de Grados y Titulos Pregrado 2011Documento34 páginasReglamento de Grados y Titulos Pregrado 2011Juan FieeAún no hay calificaciones
- Diodo ZenerDocumento9 páginasDiodo ZenerJuan FieeAún no hay calificaciones
- .Apuntes de Electrónica de Potencia - Cap. 3 Convertidores CA-cc. RectificadoresDocumento8 páginas.Apuntes de Electrónica de Potencia - Cap. 3 Convertidores CA-cc. RectificadoresFerney SolerAún no hay calificaciones
- Sensor Inductivo - Presentacion - OKDocumento19 páginasSensor Inductivo - Presentacion - OKJuan FieeAún no hay calificaciones
- Desviación de Fase, El Índice de Modulación y La Desviación de FrecuenciaDocumento12 páginasDesviación de Fase, El Índice de Modulación y La Desviación de Frecuenciarudekane236Aún no hay calificaciones
- Polarización Del Transistor BipolarDocumento13 páginasPolarización Del Transistor BipolarJuan FieeAún no hay calificaciones
- Electronica de PotenciaDocumento29 páginasElectronica de PotenciaJuan FieeAún no hay calificaciones
- Hacer Circuitos ImpresosDocumento2 páginasHacer Circuitos ImpresosJuan FieeAún no hay calificaciones
- Fuente Regulable de 0 A 30 VoltsDocumento3 páginasFuente Regulable de 0 A 30 VoltsJuan Fiee100% (3)
- 01 - ReceptoresDocumento6 páginas01 - ReceptoresJuan FieeAún no hay calificaciones
- Contar vocales, palabras repetidas y párrafos en texto de Ingeniería ElectrónicaDocumento2 páginasContar vocales, palabras repetidas y párrafos en texto de Ingeniería ElectrónicaJuan FieeAún no hay calificaciones
- Construccion Levitador MagneticoDocumento14 páginasConstruccion Levitador MagneticoJuan FieeAún no hay calificaciones
- Alimentos Perecibles y EnvasadosDocumento1 páginaAlimentos Perecibles y EnvasadosJuan FieeAún no hay calificaciones
- Actividad 1 Costeo Directo Costeo AbsorbenteDocumento10 páginasActividad 1 Costeo Directo Costeo AbsorbenteLiz MonsalveAún no hay calificaciones
- Diapositivas Cumple SportDocumento21 páginasDiapositivas Cumple SportFatima Delgado FrancoAún no hay calificaciones
- Motor de DC en DerivacionDocumento5 páginasMotor de DC en DerivacionAlvaro Chasqui0% (2)
- Lecturas 3 Curso Amag 2016 D PenalDocumento114 páginasLecturas 3 Curso Amag 2016 D Penaljose miguelAún no hay calificaciones
- Act 3 Admión GeneralDocumento17 páginasAct 3 Admión GeneralDavid RodriguezAún no hay calificaciones
- VALIDEZ Trabajo de InvestigacionDocumento9 páginasVALIDEZ Trabajo de InvestigacionSilvia Ruiz FernandezAún no hay calificaciones
- Glosario. Cultura EscolarDocumento3 páginasGlosario. Cultura EscolarLuisa RamírezAún no hay calificaciones
- Admon. de Proyectos Minero-MetalúrgicosDocumento234 páginasAdmon. de Proyectos Minero-MetalúrgicosRaulAún no hay calificaciones
- Plan Gestion Del Riesgo-San Juan de La FronteraDocumento57 páginasPlan Gestion Del Riesgo-San Juan de La FronteraFERMIN DIAZ CCENTEAún no hay calificaciones
- DIVERTIMATEDocumento3 páginasDIVERTIMATEPerla GuajardoAún no hay calificaciones
- Matemática Guía 8Documento10 páginasMatemática Guía 8Galo Fabián Alvarez TafurAún no hay calificaciones
- Modelos de Familia Según La BibliaDocumento5 páginasModelos de Familia Según La BibliaTatiana FerrerAún no hay calificaciones
- La Cosmovisión AymaraDocumento2 páginasLa Cosmovisión AymaraRoberto EsprellaAún no hay calificaciones
- Programa Fiestas YedraDocumento8 páginasPrograma Fiestas YedraBaeza ForosAún no hay calificaciones
- GuiaDeEstudios XB IIGDocumento16 páginasGuiaDeEstudios XB IIGSky LuAún no hay calificaciones
- Tarea Enfermedades Geneticas y Cariotipos de AnimalesDocumento2 páginasTarea Enfermedades Geneticas y Cariotipos de AnimalesADRIANA SANTACRUZAún no hay calificaciones
- Los Hijos de Isacar 2Documento2 páginasLos Hijos de Isacar 2Enrique Daniel MelegattiAún no hay calificaciones
- Haemonchus PlaceiDocumento1 páginaHaemonchus PlaceiWilson Barcenas ArangoAún no hay calificaciones
- Denuncia Penal - Chero Flores MercedesDocumento12 páginasDenuncia Penal - Chero Flores MercedesWALTER ALONZO ANGELES REBAZAAún no hay calificaciones
- Unidad 3 Pruebas de Hipotesis 001Documento25 páginasUnidad 3 Pruebas de Hipotesis 001sicor gameplaysAún no hay calificaciones
- Informe 04Documento8 páginasInforme 04alfonso luis mendoza de la cruzAún no hay calificaciones
- Mecatronica PDFDocumento109 páginasMecatronica PDFstaticfactory9281100% (1)
- Puzzles - 1e4 Ideas Contra La Siciliana PDFDocumento6 páginasPuzzles - 1e4 Ideas Contra La Siciliana PDFCristian HidalgoAún no hay calificaciones
- El Pensamiento CentroamericanoDocumento26 páginasEl Pensamiento CentroamericanoEver Fuentes100% (1)
- QuemadurasDocumento24 páginasQuemadurasLeo SalAún no hay calificaciones
- Gestión Escolar EstratégicaDocumento13 páginasGestión Escolar EstratégicamarisaborreroAún no hay calificaciones
- Sistemas ecuaciones linealesDocumento3 páginasSistemas ecuaciones linealesCristhian EscuderoAún no hay calificaciones
- Informe Lenguaje Texto e y T ADocumento6 páginasInforme Lenguaje Texto e y T ABel Pinto100% (1)
- Las Saturnalia o Saturnales Eran Unas de Las Festividades Más Importantes Del Calendario Romano y Se Realizaban en Honor A SaturnoDocumento20 páginasLas Saturnalia o Saturnales Eran Unas de Las Festividades Más Importantes Del Calendario Romano y Se Realizaban en Honor A Saturnotor3Aún no hay calificaciones
- 1.halo - GlasslandsDocumento364 páginas1.halo - Glasslandsangel gonzalez GonzalezAún no hay calificaciones