También podría gustarte
- 1ro SecundariaDocumento35 páginas1ro Secundariamarlo sislaAún no hay calificaciones
- Robotica y Sistemas Neumaticos e HidraulicosDocumento21 páginasRobotica y Sistemas Neumaticos e HidraulicosjairozasAún no hay calificaciones
- Practica 10 Anexo 1 Word Tic 20-21Documento3 páginasPractica 10 Anexo 1 Word Tic 20-21Jairo Bruno garciaAún no hay calificaciones
- Writer InvestigaciónDocumento3 páginasWriter Investigaciónluca alvarezAún no hay calificaciones
- Robótica PDFDocumento6 páginasRobótica PDFmariaml15Aún no hay calificaciones
- Mecanismo RoboticoDocumento9 páginasMecanismo RoboticoclintonAún no hay calificaciones
- Presentación 4Documento20 páginasPresentación 4Guillermo Caminero RamírezAún no hay calificaciones
- Monografía Robótica e Inteligencia ArtificialDocumento20 páginasMonografía Robótica e Inteligencia ArtificialBryant Christian Quiroz Vera90% (10)
- Taller de Tecnología 2Documento6 páginasTaller de Tecnología 2Felipe Ramirez CardozoAún no hay calificaciones
- La RoboticaDocumento7 páginasLa RoboticaDiego AragonAún no hay calificaciones
- Monografía Robótica e Inteligencia ArtificialDocumento19 páginasMonografía Robótica e Inteligencia ArtificialBryant Christian Quiroz VeraAún no hay calificaciones
- Robotic ADocumento6 páginasRobotic AAna Marcela Orellana NuilaAún no hay calificaciones
- 1.3 SubsistemasDocumento5 páginas1.3 SubsistemasYesi Salazar LimasAún no hay calificaciones
- Monografia Robotica e Inteligencia ArtificialDocumento20 páginasMonografia Robotica e Inteligencia Artificialjeremy floresAún no hay calificaciones
- Cuadernillo Robotica 2023 2 SeccionDocumento8 páginasCuadernillo Robotica 2023 2 Seccionlucianadisanto2009Aún no hay calificaciones
- Robotica e Inteligencia ArtificialDocumento33 páginasRobotica e Inteligencia ArtificialR̶o̶m̶m̶e̶l̶ M̶a̶z̶a̶Aún no hay calificaciones
- RoboticaDocumento29 páginasRoboticasanktsAún no hay calificaciones
- Examen de Procesador de TextoDocumento6 páginasExamen de Procesador de Textotecnologia9Aún no hay calificaciones
- INTELIGENCIADocumento13 páginasINTELIGENCIAggomezAún no hay calificaciones
- Anatomía Del RobotDocumento3 páginasAnatomía Del RobotArmando JesusAún no hay calificaciones
- Partes-Principales-De-Robot-Industrial-Equipo 9Documento13 páginasPartes-Principales-De-Robot-Industrial-Equipo 9holaAún no hay calificaciones
- La Computación en La RobóticaDocumento15 páginasLa Computación en La RobóticaSamuel Gómez0% (1)
- Repaso de RobóticaDocumento3 páginasRepaso de RobóticaMauricio Andres Mongui MolinaAún no hay calificaciones
- Robotic ADocumento11 páginasRobotic AKatheryn Gissel Pérez PérezAún no hay calificaciones
- ROBOTICADocumento5 páginasROBOTICAvictoria stherAún no hay calificaciones
- La Robotica 3ra GuiaDocumento11 páginasLa Robotica 3ra GuiaFelipe Ramirez CardozoAún no hay calificaciones
- Brazo RoboticoDocumento9 páginasBrazo Roboticorudy condoriAún no hay calificaciones
- Cap.3 Fundamentos de RobóticaDocumento12 páginasCap.3 Fundamentos de RobóticaJaime Monroy HerreraAún no hay calificaciones
- La RobóticaDocumento4 páginasLa RobóticajrmasterAún no hay calificaciones
- Sistemas RoboticosDocumento14 páginasSistemas Roboticosanon_434435502Aún no hay calificaciones
- Robotica I ParcialDocumento4 páginasRobotica I ParcialAaron HernandezAún no hay calificaciones
- Robótica Wps OfficeDocumento3 páginasRobótica Wps OfficeRolando HernándezAún no hay calificaciones
- Guia Celulas de ManufacturaDocumento8 páginasGuia Celulas de ManufacturaYazmani Leonel Franco Gutierrez100% (1)
- Robotica DanielDocumento12 páginasRobotica DanielDaniel LugoAún no hay calificaciones
- Robótica Guia 1Documento3 páginasRobótica Guia 1Alejandro PinzonAún no hay calificaciones
- Mecanismos en Robots y Robots Aplicados en La Industria EcuatorianaDocumento7 páginasMecanismos en Robots y Robots Aplicados en La Industria EcuatorianaFranklin Veintimilla CalvopiñaAún no hay calificaciones
- Unidad 5 Aplicaciones Con Técnicas de IaDocumento36 páginasUnidad 5 Aplicaciones Con Técnicas de IaMayra Skethe Mrtz GonzalezAún no hay calificaciones
- Componentes ExternosDocumento3 páginasComponentes ExternosJOSE RAMON PACHECO LEYVAAún no hay calificaciones
- Desarrollo de Un Sistema Experto para Un Brazo k680 SterenDocumento7 páginasDesarrollo de Un Sistema Experto para Un Brazo k680 SterenArturo Octavio Vazquez TorresAún no hay calificaciones
- Sistemas Control y RoboticaDocumento56 páginasSistemas Control y Roboticadaniel buelvas100% (1)
- Sistemas Control y RoboticaDocumento56 páginasSistemas Control y Roboticadaniel buelvasAún no hay calificaciones
- Presentasion Resumen Bloque 1 Jhonny Casallas y Halan RodriguezDocumento9 páginasPresentasion Resumen Bloque 1 Jhonny Casallas y Halan RodriguezSebastian CasallasAún no hay calificaciones
- Concepto de RoboticaDocumento3 páginasConcepto de RoboticaMariano Ënriquë Dë JësusAún no hay calificaciones
- Qué Es Un Robot IndustriaDocumento18 páginasQué Es Un Robot IndustriaOscar Antonio Flores Juarez67% (3)
- Guia de Logica PreparatoriaDocumento8 páginasGuia de Logica PreparatoriaBromo MentoAún no hay calificaciones
- Qué Es La RobóticaDocumento5 páginasQué Es La RobóticamilitzaAún no hay calificaciones
- Folleto Tríptico RoboticaDocumento2 páginasFolleto Tríptico RoboticaYonny CorderoAún no hay calificaciones
- Introducción A La Robótica y La AutomatizaciónDocumento7 páginasIntroducción A La Robótica y La AutomatizacióndocenciasalesianaAún no hay calificaciones
- Actividad Sumativa 3Documento3 páginasActividad Sumativa 3Azul GonzálezAún no hay calificaciones
- Robótica Industrial FinalDocumento20 páginasRobótica Industrial FinalMarvel Antonio Oviedo CasasAún no hay calificaciones
- CuestonarioDocumento4 páginasCuestonarioSofía S. ZambranoAún no hay calificaciones
- Sistema Control 2Documento56 páginasSistema Control 2Princess SerenityAún no hay calificaciones
- RoboticaDocumento5 páginasRoboticavalentine.afm257Aún no hay calificaciones
- Robotica DanielDocumento12 páginasRobotica DanielDaniel LugoAún no hay calificaciones
- Interaccion Con Robots Semana 2Documento24 páginasInteraccion Con Robots Semana 2PEDRO JOSUE BAUTISTA OJEDAAún no hay calificaciones
- Trabajo de Informatica UcatDocumento14 páginasTrabajo de Informatica UcatAndrews CardozoAún no hay calificaciones
- Partes Del RobotDocumento11 páginasPartes Del RobotjuanAún no hay calificaciones
- robot móvil: Liberando el potencial visionario de los robots móvilesDe Everandrobot móvil: Liberando el potencial visionario de los robots móvilesAún no hay calificaciones
- Computación Física: Explorando la visión por computadora en la computación físicaDe EverandComputación Física: Explorando la visión por computadora en la computación físicaAún no hay calificaciones
- Ecuaciones Diferenciales Aplicadas MACHETEDocumento8 páginasEcuaciones Diferenciales Aplicadas MACHETEjesusAún no hay calificaciones
- Titulación AspirinaDocumento3 páginasTitulación AspirinaRocío RamírezAún no hay calificaciones
- G 3Documento6 páginasG 3Byron AlvaradoAún no hay calificaciones
- Derecho Ambiental EN EL PERUDocumento12 páginasDerecho Ambiental EN EL PERUDelbert Castillo OrtegaAún no hay calificaciones
- Ruido 1Documento39 páginasRuido 1Edsson CalizayaAún no hay calificaciones
- Derivada Función InversaDocumento6 páginasDerivada Función InversagiseAún no hay calificaciones
- Dibujo Contemporáneo (Lucas Ospina)Documento5 páginasDibujo Contemporáneo (Lucas Ospina)dedtmarAún no hay calificaciones
- Ejercicio 3.5.4: 3.5 Ejercicios Resueltos (Continuación )Documento60 páginasEjercicio 3.5.4: 3.5 Ejercicios Resueltos (Continuación )CR GPAún no hay calificaciones
- La Liquidación de Cirugías FLUJOGRAMADocumento1 páginaLa Liquidación de Cirugías FLUJOGRAMAjuan esteban cuellar diazAún no hay calificaciones
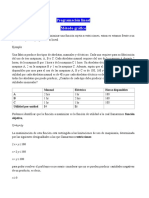
- 4.1 Programacion Lineal-Metodo graficoDIEGODocumento8 páginas4.1 Programacion Lineal-Metodo graficoDIEGODiego Hernández GuerreroAún no hay calificaciones
- Enriquecimiento Ambiental en PrimatesDocumento7 páginasEnriquecimiento Ambiental en Primatesbtrzz zz100% (1)
- Tecles de Cadena PDFDocumento48 páginasTecles de Cadena PDFLeonel Rubio100% (1)
- Abril 6 Al 10Documento5 páginasAbril 6 Al 10Chinche MetalinniAún no hay calificaciones
- Ética de AristótelesDocumento5 páginasÉtica de AristótelesCristian Trujillo GomezAún no hay calificaciones
- Precios Máximos de Referencia para FormosaDocumento10 páginasPrecios Máximos de Referencia para FormosaKaren Jimena GómezAún no hay calificaciones
- Aquelarre, La NieblaDocumento68 páginasAquelarre, La NieblaToritaka Tokumei100% (1)
- Anato 3Documento7 páginasAnato 3Ruth Callo CastilloAún no hay calificaciones
- Caldera y Calderines Usos y PartesDocumento25 páginasCaldera y Calderines Usos y PartesXavier Pacheco RomeroAún no hay calificaciones
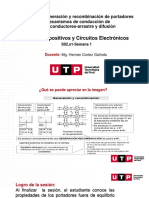
- S02.s1-Generacion y Recombinacion de PortadoresDocumento37 páginasS02.s1-Generacion y Recombinacion de PortadoresVictor RaulAún no hay calificaciones
- Samael Aun Weor - Antropología GnósticaDocumento47 páginasSamael Aun Weor - Antropología GnósticaLeonardo Cuevas Zepeda100% (1)
- Aplicativo Ciclos de MejoraDocumento2 páginasAplicativo Ciclos de MejoraAntonieta PeraltaAún no hay calificaciones
- MMAPR2009Documento60 páginasMMAPR2009Diego Avendaño0% (1)
- Ventajas y DesventajasDocumento2 páginasVentajas y DesventajasPerla Espino MarinAún no hay calificaciones
- Trabajo Final Automatización IndustrialDocumento14 páginasTrabajo Final Automatización IndustrialRoberto Herrera FernandezAún no hay calificaciones
- Efecto de La Hormona Root-Hor en El Enraizamiento Del BambúDocumento96 páginasEfecto de La Hormona Root-Hor en El Enraizamiento Del BambúALEX SALDAÑA.O100% (1)
- Trabajo Final AntropologiaDocumento5 páginasTrabajo Final AntropologiaLujaris Hiciano0% (1)
- Actividad 4 Teoría Del ProductorDocumento7 páginasActividad 4 Teoría Del ProductorGina Giseth GALINDO DEVIAAún no hay calificaciones
- CertificadoDocumento5 páginasCertificadoManuel SaavedraAún no hay calificaciones
- Max Weber - Varios Artículos - OCRDocumento16 páginasMax Weber - Varios Artículos - OCRnachitronAún no hay calificaciones
- RESUMEN EJECUTIVO EIA CH IllapaniDocumento29 páginasRESUMEN EJECUTIVO EIA CH IllapaniAnccas Wil AnccasAún no hay calificaciones