También podría gustarte
- Pantanos de VillaDocumento14 páginasPantanos de VillaRenato AlmdCurAún no hay calificaciones
- Exp - Tec .Tuti Huambo Cabanaconde Chinini Pag 1 58Documento58 páginasExp - Tec .Tuti Huambo Cabanaconde Chinini Pag 1 58Ronald Espire GilAún no hay calificaciones
- Certificado - Cable - NYY 1x10 mm2Documento4 páginasCertificado - Cable - NYY 1x10 mm2Francisco Mendoza Rosado100% (1)
- Qué Es Un Pilote y Cuando Se Utilizarías Este ElementoDocumento1 páginaQué Es Un Pilote y Cuando Se Utilizarías Este ElementoHans Lizandro OrdoñesAún no hay calificaciones
- Memoria Descriptiva General para Licencia de DemolicionDocumento14 páginasMemoria Descriptiva General para Licencia de DemolicionGeorge Franco Matta TelloAún no hay calificaciones
- Proteccion Catodica en GrifoDocumento27 páginasProteccion Catodica en Grifojhoncq111Aún no hay calificaciones
- Muro de ContencionDocumento49 páginasMuro de Contencionsheyla bastidas100% (1)
- Acabado Tarrajeo, Cielo RassoDocumento25 páginasAcabado Tarrajeo, Cielo RassoCarlos Reyes CastilloAún no hay calificaciones
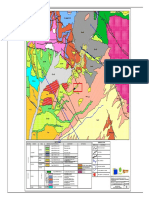
- 06 Mapa Geologico MoqueguaDocumento1 página06 Mapa Geologico MoqueguaStan SaavedraAún no hay calificaciones
- Calculo para Llave TérmicaDocumento3 páginasCalculo para Llave TérmicaMaxi LandivisnayAún no hay calificaciones
- Ficha Técnica Del Roble de Tierra FriaDocumento5 páginasFicha Técnica Del Roble de Tierra Friaedsiob velasquezAún no hay calificaciones
- Base C. Mayor N 001-2022-SENATI-DZPT Ejecutor Rev 2022-07-05 OOUDocumento87 páginasBase C. Mayor N 001-2022-SENATI-DZPT Ejecutor Rev 2022-07-05 OOUAlfonso BellidoAún no hay calificaciones
- Capitulo IV DE LA NORMA E020Documento5 páginasCapitulo IV DE LA NORMA E020Giovanni Porras BarruetaAún no hay calificaciones
- YONYDocumento1 páginaYONYemp xX xXAún no hay calificaciones
- Proyecto Estudio Electrificacion Plaza San Jeronimo Con Panel SolarDocumento72 páginasProyecto Estudio Electrificacion Plaza San Jeronimo Con Panel SolarHernán Román BerrocalAún no hay calificaciones
- CV EjemploDocumento6 páginasCV EjemploSandra Romero VenerosAún no hay calificaciones
- Especificaciones Tecnicas Linea AduccionDocumento18 páginasEspecificaciones Tecnicas Linea AduccionBicilino AntezanaAún no hay calificaciones
- Protección Contra Incendios - Trabajos de Demolición - Plan de Prevención AmbientalDocumento54 páginasProtección Contra Incendios - Trabajos de Demolición - Plan de Prevención AmbientalJonathan CallalliAún no hay calificaciones
- Pets Armaduras Con Fierros de ConstruccionDocumento3 páginasPets Armaduras Con Fierros de ConstruccionJulioMedinaAún no hay calificaciones
- Clase 14x Construccion II - Aparatos Electricos 2017 IDocumento34 páginasClase 14x Construccion II - Aparatos Electricos 2017 IRubén A. Flores RojasAún no hay calificaciones
- CARTILLADocumento4 páginasCARTILLAJose Antonio ECAún no hay calificaciones
- Proyecto Simulador SismicoDocumento7 páginasProyecto Simulador SismicoPercy Tineo PongoAún no hay calificaciones
- Ejercicio Resuelto en ClaseDocumento7 páginasEjercicio Resuelto en ClaseBladimir VelascoAún no hay calificaciones
- Memoria Calculo Colegio Jose Carlos Mariategui PDFDocumento68 páginasMemoria Calculo Colegio Jose Carlos Mariategui PDFLiTo MatosAún no hay calificaciones
- Pliego de Observaciones Nuevo AmanecerDocumento4 páginasPliego de Observaciones Nuevo AmanecerJohn RojasAún no hay calificaciones
- Syllabus Construcción de EdificacionesDocumento9 páginasSyllabus Construcción de EdificacionesJAVIER ALEXANDER CUADRAO LOZANOAún no hay calificaciones
- Formulario Unico de Tramite Espinar 2021Documento1 páginaFormulario Unico de Tramite Espinar 2021jrAún no hay calificaciones
- Memoria Descriptiva Ie FinalDocumento11 páginasMemoria Descriptiva Ie FinalSantos Roosevelt Saravia VillanuevaAún no hay calificaciones
- SAFRA Catálogo Toldos y PèrgolasDocumento14 páginasSAFRA Catálogo Toldos y PèrgolasJerson serranoAún no hay calificaciones
- Calculo de Cantidad de PegamentoDocumento3 páginasCalculo de Cantidad de PegamentoLuis PalmaAún no hay calificaciones
- Grado de Vulnerabilidad Sísmica Benedetti PetriniDocumento10 páginasGrado de Vulnerabilidad Sísmica Benedetti PetriniMiguel Angel Silva CubasAún no hay calificaciones
- Metrados de ElectricasDocumento16 páginasMetrados de ElectricasGian Marcos RuizAún no hay calificaciones
- BEBEDEROSDocumento19 páginasBEBEDEROSAngela VazquezAún no hay calificaciones
- Procedimiento de DemolicionDocumento5 páginasProcedimiento de DemolicionEvelynkaren Guevara CarrascoAún no hay calificaciones
- Inf Geot Santa Clara PDFDocumento70 páginasInf Geot Santa Clara PDFRoy Alfaro0% (1)
- Recomendaciones Sobre El AceroDocumento8 páginasRecomendaciones Sobre El Aceropepe_carambola0% (1)
- Bandeja de Rejilla SchneiderDocumento20 páginasBandeja de Rejilla Schneiderricardo_74_02Aún no hay calificaciones
- MSProjectDocumento49 páginasMSProjectMargaret Lissette MorenoAún no hay calificaciones
- F T Modulo Fotovoltaico IS150 12 EspDocumento2 páginasF T Modulo Fotovoltaico IS150 12 EspJosé Antonio De Dios RodríguezAún no hay calificaciones
- Piedra ChancadaDocumento21 páginasPiedra ChancadaYul Valentin CongoraAún no hay calificaciones
- Especificaciones - Inst. Electricas m01Documento10 páginasEspecificaciones - Inst. Electricas m01Roberth Yomona MoralesAún no hay calificaciones
- Carta PoderDocumento2 páginasCarta PoderThamara Martinez100% (1)
- Memoria Descriptiva de Obra Construccion de Veredas y Barandas Veracruz ChicoDocumento6 páginasMemoria Descriptiva de Obra Construccion de Veredas y Barandas Veracruz ChicoYoel EscobarAún no hay calificaciones
- Espacios Educativos SecundariaDocumento1 páginaEspacios Educativos SecundariaYMiguel VelasquezAún no hay calificaciones
- EE TT II ElectricaDocumento12 páginasEE TT II ElectricaHugo CastillejoAún no hay calificaciones
- Memoria Calculo Estructural - TF - YEAN MARTIN PAUCARA COAGUILADocumento8 páginasMemoria Calculo Estructural - TF - YEAN MARTIN PAUCARA COAGUILAYean Martin Paucara CoaguilaAún no hay calificaciones
- Solicitud de Estado de Factibilidad ENOSADocumento2 páginasSolicitud de Estado de Factibilidad ENOSACesar Santamaria JimenezAún no hay calificaciones
- Qué Piensas Sobre La Contaminación Del Medio AmbienteDocumento3 páginasQué Piensas Sobre La Contaminación Del Medio AmbienteDahiana NorabuenaAún no hay calificaciones
- Et GG Triax130s TDMDocumento2 páginasEt GG Triax130s TDMLuis E. Ccama CahuanaAún no hay calificaciones
- Memoria Descriptiva Mejoramiento Coliseo Municipal Jose PainDocumento7 páginasMemoria Descriptiva Mejoramiento Coliseo Municipal Jose PainJose CarlosAún no hay calificaciones
- MARMOLDocumento24 páginasMARMOLAG S Isaac0% (1)
- Trabajo 2 - Peso Especifico y Contenido de HumedadDocumento29 páginasTrabajo 2 - Peso Especifico y Contenido de HumedadBenjamín Jiménez CarranzaAún no hay calificaciones
- Pruebas de Instalaciones EléctricasDocumento4 páginasPruebas de Instalaciones EléctricasMike Jiménez ZamudioAún no hay calificaciones
- Silabo Ambientes Virtuales - RemoDocumento4 páginasSilabo Ambientes Virtuales - RemoRemo Choquejahua AceroAún no hay calificaciones
- Proyecto Instalación de Tubería para Casas FlotantesDocumento36 páginasProyecto Instalación de Tubería para Casas FlotantesjuanAún no hay calificaciones
- D-CC-EST-10 VE01 Postes de Concreto para Cercos de AlambreDocumento3 páginasD-CC-EST-10 VE01 Postes de Concreto para Cercos de AlambreLuis Fernando Estrada CordovaAún no hay calificaciones
- Estudio Topográfico Nueva Agencia BCP SurquilloDocumento11 páginasEstudio Topográfico Nueva Agencia BCP SurquilloJuan VallejosAún no hay calificaciones
- Practica de Resistividad ElectricaDocumento6 páginasPractica de Resistividad ElectricaJuan Pablo Silverio LudeñaAún no hay calificaciones
- Cuestionario 16 Motores y GeneradoresDocumento6 páginasCuestionario 16 Motores y GeneradoresJosé Daniel Medina GarcíaAún no hay calificaciones
- Caf 2Documento17 páginasCaf 2Jonathan Lujan GomezAún no hay calificaciones
- Yacimientos de Hierro ChilenosDocumento8 páginasYacimientos de Hierro ChilenosJoachim ZoraAún no hay calificaciones
- HidrociclonesDocumento3 páginasHidrociclonespablo reyes100% (2)
- Yacimientos Estratoligados de CuDocumento12 páginasYacimientos Estratoligados de Cupablo reyes100% (1)
- Curso de EstrategiaDocumento30 páginasCurso de EstrategiaAlejandro PfeifferAún no hay calificaciones
- It ShotcreteDocumento2 páginasIt Shotcretepablo reyes100% (2)
- N° 17 Prueba de Diseños Alternativos de Socavación - N. Hernández, R. Rimmelin & H. ConstanzoDocumento13 páginasN° 17 Prueba de Diseños Alternativos de Socavación - N. Hernández, R. Rimmelin & H. Constanzopablo reyes100% (1)
- N° 19 Cámaras de Aire en Minería Subterránea - M. Leyton & E. ArayaDocumento9 páginasN° 19 Cámaras de Aire en Minería Subterránea - M. Leyton & E. Arayapablo reyes100% (2)
- N° 14 Balance Fragmentación-Daño en Roca Primaria en Mina Los Pelambres - E. Moreno & F. Vanbrabant 1Documento34 páginasN° 14 Balance Fragmentación-Daño en Roca Primaria en Mina Los Pelambres - E. Moreno & F. Vanbrabant 1pablo reyes100% (2)
- N° 15 Mine To Crush (Fragmentación para Lixiviación de Oro Sin Chancado) - D. YancachajllaDocumento14 páginasN° 15 Mine To Crush (Fragmentación para Lixiviación de Oro Sin Chancado) - D. Yancachajllapablo reyes100% (1)
- Molienda de Minerales PDFDocumento3 páginasMolienda de Minerales PDFacedillohAún no hay calificaciones
- N° 16 Enfoque Holístico Del Modelado de Fragmentación de Una Voladura de Mina - Thierry BernardDocumento21 páginasN° 16 Enfoque Holístico Del Modelado de Fragmentación de Una Voladura de Mina - Thierry Bernardpablo reyes100% (1)
- N° 13 Fragmentación - Distribución de Tamaños o de Distribuciones - P. Aguilera & J. CamposDocumento7 páginasN° 13 Fragmentación - Distribución de Tamaños o de Distribuciones - P. Aguilera & J. Campospablo reyes100% (1)
- Guia D Las Buenas Practicas en Seguridad Minera en Al Pequeña MineriaDocumento77 páginasGuia D Las Buenas Practicas en Seguridad Minera en Al Pequeña Mineriapablo reyes100% (5)
- N° 05 Validación de Tronaduras de Producción Con Gran Diámetro - R. Vargas & E. PiñonesDocumento24 páginasN° 05 Validación de Tronaduras de Producción Con Gran Diámetro - R. Vargas & E. Piñonespablo reyes100% (3)
- N° 11 Monitoreo de Hidrofracturamiento - A. Belmonte, F. Arévalo, M. Espinoza & P. JorquieraDocumento6 páginasN° 11 Monitoreo de Hidrofracturamiento - A. Belmonte, F. Arévalo, M. Espinoza & P. Jorquierapablo reyes100% (1)
- N° 12 Rango de Flyrock y Predicción Del Tamaño de Los Fragmentos - C. McKenzieDocumento17 páginasN° 12 Rango de Flyrock y Predicción Del Tamaño de Los Fragmentos - C. McKenziepablo reyes100% (5)
- N° 09 Cámaras de Aire Una Real Alternativa en Voladura de Rocas - E. ArayaDocumento16 páginasN° 09 Cámaras de Aire Una Real Alternativa en Voladura de Rocas - E. Arayapablo reyes75% (4)
- N° 07 Control de Vibraciones y Onda Aérea - N. ViñasDocumento14 páginasN° 07 Control de Vibraciones y Onda Aérea - N. Viñaspablo reyes100% (2)
- N° 08 Estrategia A La Problemática Ambiental - C. Scherpenisse G. Silva, A. Music & I. HumeresDocumento16 páginasN° 08 Estrategia A La Problemática Ambiental - C. Scherpenisse G. Silva, A. Music & I. Humerespablo reyes100% (2)
- Ds 132 Aprueba Reglamento de Seguridad MineraDocumento263 páginasDs 132 Aprueba Reglamento de Seguridad MineraOmar Espinoza VelizAún no hay calificaciones
- Decreto 54 Comites Paritarios de Higiene y SeguridadDocumento12 páginasDecreto 54 Comites Paritarios de Higiene y Seguridadpablo reyesAún no hay calificaciones
- Planificacion de ProyectosDocumento61 páginasPlanificacion de Proyectospablo reyes100% (2)
- Tranques de RelavesDocumento14 páginasTranques de Relavespablo reyes100% (9)
- PetrografiaDocumento64 páginasPetrografiapablo reyes100% (3)
- HidrometalurgiaDocumento183 páginasHidrometalurgiapablo reyes95% (19)
- Libro Economia!Documento356 páginasLibro Economia!pablo reyes100% (5)
- Apunte METODOS DE EXPLOTACIONDocumento68 páginasApunte METODOS DE EXPLOTACIONpablo reyes100% (59)
- 5º Informe Fisica Ii - Determinacion de Cte de Permeabilidad MagneticaDocumento14 páginas5º Informe Fisica Ii - Determinacion de Cte de Permeabilidad Magneticacarl yl0% (1)
- RAE Fuerza MagnéticaDocumento3 páginasRAE Fuerza MagnéticaSamuel GomezAún no hay calificaciones
- Apantallado de CablesDocumento21 páginasApantallado de CablesEmiliano FridelAún no hay calificaciones
- Electricidad 1.2Documento2 páginasElectricidad 1.2Cristian Jesús Sandoval LlontopAún no hay calificaciones
- Transformadores 1Documento49 páginasTransformadores 1CaŔlo Andre100% (1)
- Laboratorio 2 ElectromagnetismoDocumento8 páginasLaboratorio 2 Electromagnetismodiego rubioAún no hay calificaciones
- PEDI Curso2021 2022Documento3 páginasPEDI Curso2021 2022杨幂Aún no hay calificaciones
- Transformacion de Energia Magnetica en Energia Electrica Por InduccionDocumento2 páginasTransformacion de Energia Magnetica en Energia Electrica Por InduccionAnderson Nixon Rivera Alvarez33% (3)
- MAGNETOSTÁTICADocumento3 páginasMAGNETOSTÁTICAOscar BalarezoAún no hay calificaciones
- Prácticas Física II - Francisco Javier García de La CruzDocumento16 páginasPrácticas Física II - Francisco Javier García de La Cruzcisko yulAún no hay calificaciones
- Levantamiento Con BrujulaDocumento9 páginasLevantamiento Con BrujulaEddy SantiagoAún no hay calificaciones
- Electromagnetismo FisicaDocumento4 páginasElectromagnetismo FisicaYABEL YLLANES CAMPANAAún no hay calificaciones
- Curso NAVEGACION 070356Documento77 páginasCurso NAVEGACION 070356Darlin MataAún no hay calificaciones
- Campo Magnético TerrestreDocumento15 páginasCampo Magnético TerrestreAly ZavalaAún no hay calificaciones
- Tema 8 - Los Movimientos y Las Fuerzas - FyQ 3º ESO SAVIADocumento1 páginaTema 8 - Los Movimientos y Las Fuerzas - FyQ 3º ESO SAVIAMc0% (2)
- Syllabus de Electricidad y Magnetismo E.A.P. Ingeniería de ElectronicaDocumento4 páginasSyllabus de Electricidad y Magnetismo E.A.P. Ingeniería de Electronicarosembert duran sincheAún no hay calificaciones
- Astm en Español 1444Documento19 páginasAstm en Español 1444Antonio SfasAún no hay calificaciones
- Como Magnetizar AguaDocumento6 páginasComo Magnetizar AguaBLINDED185231100% (3)
- Leyes Fisicas Sobre MagnetismoDocumento6 páginasLeyes Fisicas Sobre MagnetismoDaniel LcAún no hay calificaciones
- Campo Magnético y Líneas de FuerzaDocumento6 páginasCampo Magnético y Líneas de FuerzaYomara CollaguazoAún no hay calificaciones
- Ejercicios de Campo MagneticoDocumento11 páginasEjercicios de Campo MagneticoPaKo Contreras60% (5)
- Q Campo EléctricoDocumento3 páginasQ Campo EléctricoziadAún no hay calificaciones
- Campo Magnético. Tema 5Documento77 páginasCampo Magnético. Tema 5Yilkaris GonzálezAún no hay calificaciones
- Esta Bili DadDocumento89 páginasEsta Bili DadMartinAún no hay calificaciones
- Dínamo de ExitaciónDocumento9 páginasDínamo de ExitaciónVictor Ramirez0% (1)
- Copia de Sala de ResonanciaDocumento68 páginasCopia de Sala de ResonanciaMishel CuencaAún no hay calificaciones
- 7405-16 FISICA MagnetostáticaDocumento35 páginas7405-16 FISICA MagnetostáticaYmary MB767Aún no hay calificaciones
- Guía Conceptual V BDocumento2 páginasGuía Conceptual V BALSAún no hay calificaciones
- Manual de Instalación y Operación para Medidor Electromagnético EF-ADocumento61 páginasManual de Instalación y Operación para Medidor Electromagnético EF-Asergio lira castilloAún no hay calificaciones