También podría gustarte
- Proyecto Final Semaforos Inteligentes Con El Microcontrolador PIC 16F877A PDFDocumento5 páginasProyecto Final Semaforos Inteligentes Con El Microcontrolador PIC 16F877A PDFDANIEL ANTONIO DANIEL ANTONIO DIAZ/SUAZOAún no hay calificaciones
- Proyecto Carro BluetoothDocumento24 páginasProyecto Carro BluetoothLeonardo HernandezAún no hay calificaciones
- Control de Motor Paso A Paso Con Pic16f84aDocumento7 páginasControl de Motor Paso A Paso Con Pic16f84aEleazar de la Rosa100% (1)
- Carro Robot Evasor de Obstáculos Mediante El Uso Del PIC16F877ADocumento9 páginasCarro Robot Evasor de Obstáculos Mediante El Uso Del PIC16F877APrimus 2018Aún no hay calificaciones
- Pricipio de Funcionamiento de Los PLDDocumento4 páginasPricipio de Funcionamiento de Los PLDfer6669993Aún no hay calificaciones
- Proyecto de Fisica-SemaforoDocumento9 páginasProyecto de Fisica-SemaforoJesus Manuel Castellanos CastroAún no hay calificaciones
- Seguidor de Luz PrototipoDocumento5 páginasSeguidor de Luz PrototipoGaspar CahumAún no hay calificaciones
- Práctica 2 Circuitos Combinacionales PDFDocumento22 páginasPráctica 2 Circuitos Combinacionales PDFporfirio porfirioAún no hay calificaciones
- Ejercicios Fundamentos de Circuitos ElectricosDocumento6 páginasEjercicios Fundamentos de Circuitos ElectricosGer PedreAún no hay calificaciones
- Registro de DesplazamientoDocumento4 páginasRegistro de DesplazamientoIng Luis Enrique Rivero HernandezAún no hay calificaciones
- Presentacion Curso Operación de Trenes Con PD LBDocumento84 páginasPresentacion Curso Operación de Trenes Con PD LBAlcides R Sanchez Aponte100% (1)
- Protocolo Investigacion 5612Documento11 páginasProtocolo Investigacion 5612Erick NavaAún no hay calificaciones
- Informe WarbotDocumento58 páginasInforme WarbotJulio Moreno100% (1)
- Robot Sumo RCDocumento15 páginasRobot Sumo RCangieAún no hay calificaciones
- Informe ProyectoDocumento6 páginasInforme ProyectoJorge ZambranoAún no hay calificaciones
- Solución Ejercicios Circuitos Eléctricos, Serie y ParaleloDocumento22 páginasSolución Ejercicios Circuitos Eléctricos, Serie y ParaleloCale Poblette MacayaAún no hay calificaciones
- Como Usar Livewire FullDocumento14 páginasComo Usar Livewire FullEzequiel Milá de la Roca100% (1)
- El Impacto de Los Microcontroladores en El FuturoDocumento8 páginasEl Impacto de Los Microcontroladores en El FuturoFelipe Ballestero CorderoAún no hay calificaciones
- Conversores Adc DacDocumento6 páginasConversores Adc DacKevin Barahona VelascoAún no hay calificaciones
- Paper-Robot-MiniSumo 656 683 640 PDFDocumento9 páginasPaper-Robot-MiniSumo 656 683 640 PDFAlex EdUu NúñezAún no hay calificaciones
- Dimmer DigitalDocumento2 páginasDimmer DigitalAlfredo Gutierrez PreciadoAún no hay calificaciones
- Practica 1. - Compuertas LogicasDocumento7 páginasPractica 1. - Compuertas LogicasRuben CisnerosAún no hay calificaciones
- Reporte - Final - Robotica-Ejemplo de RedaccionDocumento86 páginasReporte - Final - Robotica-Ejemplo de RedaccionRedfield58Aún no hay calificaciones
- ARDUINO InvestigaciónDocumento23 páginasARDUINO InvestigaciónSol Setnarod100% (3)
- Inversor TTLDocumento6 páginasInversor TTLMario VelascoAún no hay calificaciones
- Diseño de Robot Velocista de CompetenciaDocumento4 páginasDiseño de Robot Velocista de CompetenciaAlex Alvarez HuillcaAún no hay calificaciones
- Deber de Lengua Alan CominaDocumento5 páginasDeber de Lengua Alan CominaElizabeth CominaAún no hay calificaciones
- Diseño e Implementación de Un Controlador Pid Análogo para Un Motor UniversalDocumento7 páginasDiseño e Implementación de Un Controlador Pid Análogo para Un Motor Universalhhryc7Aún no hay calificaciones
- Proyecto de Electronica Digital Contador DigitalDocumento7 páginasProyecto de Electronica Digital Contador DigitalUziel HernandezAún no hay calificaciones
- Taller Circuitos Con DiodosDocumento2 páginasTaller Circuitos Con DiodosRONALD STIVEN BEJARANO LARRAHONDOAún no hay calificaciones
- Tesis Con ArduinoDocumento63 páginasTesis Con ArduinoEstefano EspinozaAún no hay calificaciones
- Práctica de Sistemas DigitalesDocumento5 páginasPráctica de Sistemas DigitalesLeonardo David Baca Carretero100% (1)
- Diagrama Reloj DigitalDocumento3 páginasDiagrama Reloj Digitaljonnathan jair moreno simbaquebaºAún no hay calificaciones
- Servomotores TRABAJODocumento7 páginasServomotores TRABAJOBeatriz de la CruzAún no hay calificaciones
- JustificaciónDocumento1 páginaJustificaciónwiicha2Aún no hay calificaciones
- Informe de Circuitos Logicos (Contadores) 4Documento18 páginasInforme de Circuitos Logicos (Contadores) 4Louis Charles86% (7)
- BALOTARIO N1 DE PREGUNTAS ELECTRÓNICA New PDFDocumento16 páginasBALOTARIO N1 DE PREGUNTAS ELECTRÓNICA New PDFAngello HerreraAún no hay calificaciones
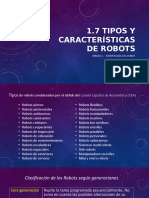
- Tipos y Características de Los RobotsDocumento15 páginasTipos y Características de Los RobotsGilbertoAún no hay calificaciones
- Practica 7Documento8 páginasPractica 7Jose Eduardo Garcia LopezAún no hay calificaciones
- Arquitectura Interna y Externa Del MicrocontroladorDocumento5 páginasArquitectura Interna y Externa Del MicrocontroladorLuis ValenciaAún no hay calificaciones
- Ejercicios de Puertas LogicasDocumento2 páginasEjercicios de Puertas LogicasRey ArturoAún no hay calificaciones
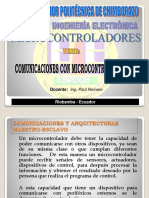
- Comunicacion Serial PDFDocumento21 páginasComunicacion Serial PDFViki AguirreAún no hay calificaciones
- Informe Estacionamiento Con Arduino + Servos + ContadorDocumento19 páginasInforme Estacionamiento Con Arduino + Servos + ContadorGalva TØPAún no hay calificaciones
- Arranque Con Variador de FrecuenciaDocumento9 páginasArranque Con Variador de FrecuenciaAlexander LuceroAún no hay calificaciones
- Lab 05 Respuesta Transitoria y EstacionariaDocumento14 páginasLab 05 Respuesta Transitoria y EstacionariaJherson Miranda CabanillasAún no hay calificaciones
- Seguidor de Línea ProfecionalDocumento22 páginasSeguidor de Línea ProfecionalMATRIX DE ING. SISTEMASAún no hay calificaciones
- Características Principales de Una Pista para El Robot Seguidor de LíneaDocumento3 páginasCaracterísticas Principales de Una Pista para El Robot Seguidor de Líneamicropic2010187100% (2)
- Marco TeoricoDocumento3 páginasMarco TeoricoEdgar Paolo Rentería Liendo100% (1)
- Exposicion MicrocontroladoresDocumento33 páginasExposicion MicrocontroladoresRosita Mtz SAún no hay calificaciones
- Control para Motor CC Utilizado El Pic 16f84aDocumento9 páginasControl para Motor CC Utilizado El Pic 16f84aLuis David GuillinAún no hay calificaciones
- Araña RobotDocumento7 páginasAraña RobotJorge TorresAún no hay calificaciones
- Tarea 1Documento11 páginasTarea 1Fernando MendozaAún no hay calificaciones
- Brazo Mecánico Con Puente HDocumento7 páginasBrazo Mecánico Con Puente HSebastiánAún no hay calificaciones
- Fisica Proyecto 5 Semana 4 Segundo BachilleratoDocumento6 páginasFisica Proyecto 5 Semana 4 Segundo Bachilleratofabianruizo0% (1)
- Guía Practica 1 Control Industrial - Grupo 5Documento6 páginasGuía Practica 1 Control Industrial - Grupo 5Andres MendozAún no hay calificaciones
- Lab View y Spartan 3EDocumento4 páginasLab View y Spartan 3EVictoria YánezAún no hay calificaciones
- Flip Flop 7476 para RizoDocumento8 páginasFlip Flop 7476 para RizoAyleen K. ReyesAún no hay calificaciones
- Proyecto Seguidor de LineaDocumento17 páginasProyecto Seguidor de LineaCristian GrandaAún no hay calificaciones
- Seguidor de Línea (Profesional) - TdrobóticaDocumento19 páginasSeguidor de Línea (Profesional) - Tdrobóticagermanedu2000Aún no hay calificaciones
- Mega Sumo RCDocumento15 páginasMega Sumo RCMichelle FosterAún no hay calificaciones
- Battle BotDocumento6 páginasBattle BotGustavo Adolfo Flores NinaAún no hay calificaciones
- Certificado de Trabajo ConcesionesDocumento1 páginaCertificado de Trabajo ConcesionesGianmarco JPAún no hay calificaciones
- Casuistica PolicialDocumento35 páginasCasuistica PolicialGianmarco JP0% (1)
- Introduccion CadenaDocumento27 páginasIntroduccion CadenaGianmarco JPAún no hay calificaciones
- Conversor CC-CCDocumento35 páginasConversor CC-CCGianmarco JPAún no hay calificaciones
- TransfDocumento3 páginasTransfGianmarco JPAún no hay calificaciones
- Procesos de OpmitizacionDocumento2 páginasProcesos de OpmitizacionGianmarco JPAún no hay calificaciones
- 423 - Pdfsam - Hibbeler - Mecánica de Materiales 8a EdiciónDocumento32 páginas423 - Pdfsam - Hibbeler - Mecánica de Materiales 8a EdiciónGianmarco JPAún no hay calificaciones
- Fresadora Prolight - EstudiantesDocumento7 páginasFresadora Prolight - EstudiantesGianmarco JPAún no hay calificaciones
- Fuentes de ConsultaDocumento2 páginasFuentes de ConsultaFernando AlexisAún no hay calificaciones
- Chema WeldDocumento2 páginasChema WeldJORGE LUISAún no hay calificaciones
- NRF-127-PEMEX-2007 Agua de Mar Vs IncendioDocumento77 páginasNRF-127-PEMEX-2007 Agua de Mar Vs IncendioGabriel MarquezAún no hay calificaciones
- Diseño Cabezal CentralDocumento9 páginasDiseño Cabezal CentralOscar Blanco FloresAún no hay calificaciones
- Densidad RealDocumento2 páginasDensidad RealEvelyn CortezAún no hay calificaciones
- Magnitud Física Símbolo Unidad SIDocumento2 páginasMagnitud Física Símbolo Unidad SIBrandonRivasGiraldoAún no hay calificaciones
- Test de IluminaciónDocumento5 páginasTest de IluminaciónGustavo García SilvaAún no hay calificaciones
- Silabo Materiales de ContruccionDocumento3 páginasSilabo Materiales de ContruccionAlfredo Romero KanaAún no hay calificaciones
- CalorLatente Javier Bravo AhujaDocumento12 páginasCalorLatente Javier Bravo AhujaPROFABELGPAún no hay calificaciones
- Maquinarías EspecialesDocumento4 páginasMaquinarías EspecialesEdgar Raul Machaca MaytaAún no hay calificaciones
- 3SU18010NA002AC2 Datasheet EsDocumento5 páginas3SU18010NA002AC2 Datasheet Escarlos.bernalAún no hay calificaciones
- Conservación Del Calor Dentro Del HornoDocumento2 páginasConservación Del Calor Dentro Del Hornolduran_63100% (1)
- Partes Del EscritorioDocumento3 páginasPartes Del Escritorioerik monrgaAún no hay calificaciones
- Estructuras de Datos Con Objetos Visuales - JTable e ImágenesDocumento16 páginasEstructuras de Datos Con Objetos Visuales - JTable e ImágenesJuan Vera CastilloAún no hay calificaciones
- Trabajo Práctico de Laboratorio #8 - Red-Ox y CeldasDocumento3 páginasTrabajo Práctico de Laboratorio #8 - Red-Ox y CeldasImanol ZabalaAún no hay calificaciones
- Memoria de Cálculo E6 - Quilca - Ramal Faucett - GambettaDocumento4 páginasMemoria de Cálculo E6 - Quilca - Ramal Faucett - GambettaJimmy HonismanAún no hay calificaciones
- Tratamiento de Aguas Residuales Mediante Evaporadores Al VacíoDocumento4 páginasTratamiento de Aguas Residuales Mediante Evaporadores Al VacíoFredi Cari CarreraAún no hay calificaciones
- F. R. Shanley - Mecanica de Materiales PDFDocumento485 páginasF. R. Shanley - Mecanica de Materiales PDFIsidro Gutierrez Pari100% (2)
- Formato de Reporte PCRDocumento1 páginaFormato de Reporte PCRGisela ChicataAún no hay calificaciones
- Memorias Proyecto PuentesDocumento50 páginasMemorias Proyecto PuentesMaqMaikAún no hay calificaciones
- Consideraciones Implementación de Cursos Virtuales Campus SC 2022Documento2 páginasConsideraciones Implementación de Cursos Virtuales Campus SC 2022West LyAún no hay calificaciones
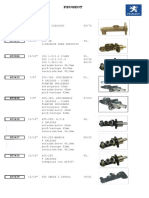
- PeugeotDocumento30 páginasPeugeotאליהו אסתי אנדרדAún no hay calificaciones
- Cap 02Documento33 páginasCap 02DAYNI RodríguezAún no hay calificaciones
- CAJABLANCAV2Documento28 páginasCAJABLANCAV2Didi DuarteAún no hay calificaciones
- Procedimiento Flotabilidad y EstabilidadDocumento7 páginasProcedimiento Flotabilidad y EstabilidadCarlos RoblesAún no hay calificaciones
- LAB 05 Motor DC 2021Documento16 páginasLAB 05 Motor DC 2021Adailton Umasi PilaAún no hay calificaciones
- 16.2.manual Entrenamiento DVM Pro - 2015Documento85 páginas16.2.manual Entrenamiento DVM Pro - 2015Raul Jaime Flores GuardiaAún no hay calificaciones
- Columnas de Longitud Intermedia Formulas EmpíricasDocumento16 páginasColumnas de Longitud Intermedia Formulas Empíricas'Abrahan Isaac0% (1)