También podría gustarte
- Comunicaciones Moviles Hernando Rabanos PDFDocumento700 páginasComunicaciones Moviles Hernando Rabanos PDFJuan CAún no hay calificaciones
- Diseño de Un Semáforo de Dos Vías Controlado Desde HMI en PLC Siemens S7-1200Documento9 páginasDiseño de Un Semáforo de Dos Vías Controlado Desde HMI en PLC Siemens S7-1200Jose OrtizAún no hay calificaciones
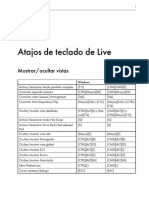
- Atajos Ableton LiveDocumento11 páginasAtajos Ableton LiveJunior da SilvaAún no hay calificaciones
- Informe As IDocumento35 páginasInforme As IMatias Sanchez50% (2)
- Tarea Colaborativa Grafcet S - 11Documento3 páginasTarea Colaborativa Grafcet S - 11Angel Marticorena50% (2)
- Curso para Reparar Celulares 100% PrácticoDocumento264 páginasCurso para Reparar Celulares 100% PrácticoFranciscoReyesRaymundo100% (1)
- Laboratorio #2 - Aplicaciones Del Algebra de BooleDocumento2 páginasLaboratorio #2 - Aplicaciones Del Algebra de Boolebladeblak1Aún no hay calificaciones
- Practica. Dosificador Mezclador AutomáticoDocumento2 páginasPractica. Dosificador Mezclador AutomáticoPatriciaBlázquezGarcía75% (4)
- Control PID Digital para Banda TransportadoraDocumento2 páginasControl PID Digital para Banda TransportadoraAndrés Eugenio PérezAún no hay calificaciones
- Brazo HidraulicoDocumento21 páginasBrazo HidraulicoKaterin PerezAún no hay calificaciones
- Informe Grupo 8Documento9 páginasInforme Grupo 8Milton FernandezAún no hay calificaciones
- Practica 30. Proceso de Electrolisis. SoluciónDocumento3 páginasPractica 30. Proceso de Electrolisis. SoluciónPatriciaBlázquezGarcía100% (1)
- 7 Grafcet (Ii) - Programación de Un Cruce Regulado Por Semáforo.Documento15 páginas7 Grafcet (Ii) - Programación de Un Cruce Regulado Por Semáforo.Alfredo GuzAún no hay calificaciones
- Practica LavadoraDocumento6 páginasPractica LavadoraArturinMandujanoAún no hay calificaciones
- Direccionamiento IP Sin ClaseDocumento19 páginasDireccionamiento IP Sin ClaseJhony SiguenzaAún no hay calificaciones
- Linea de Tiempo y Familias de SiemensDocumento10 páginasLinea de Tiempo y Familias de SiemensAlejandra AndradeAún no hay calificaciones
- Practica 1. - Compuertas LogicasDocumento7 páginasPractica 1. - Compuertas LogicasRuben CisnerosAún no hay calificaciones
- Informe 2 Reduccion Por Mapas de KarnaugDocumento5 páginasInforme 2 Reduccion Por Mapas de KarnaugklausAún no hay calificaciones
- Sumador de 4 BitsDocumento11 páginasSumador de 4 Bitsbaad13Aún no hay calificaciones
- Informe SensoresDocumento22 páginasInforme SensoresGuillermo Rhc'Aún no hay calificaciones
- Informe 4 G8Documento18 páginasInforme 4 G8Ronald I.Aún no hay calificaciones
- Ejercicios Resueltos AutomatizacionDocumento8 páginasEjercicios Resueltos AutomatizacionUriFontes0% (1)
- LAB 2 - Selecion y Configuración Del SLC 5 - 04 ABDocumento8 páginasLAB 2 - Selecion y Configuración Del SLC 5 - 04 ABalfred_hm0% (1)
- Arquitectura de Redes PropietariasDocumento44 páginasArquitectura de Redes PropietariasandrlarcAún no hay calificaciones
- Tarea T1Documento55 páginasTarea T1Raul SaenzAún no hay calificaciones
- Ensayo Unidad3Documento2 páginasEnsayo Unidad3Martin BaltazarAún no hay calificaciones
- Examen 3 - ControlDocumento4 páginasExamen 3 - ControlByron VascoAún no hay calificaciones
- Elementos de Una Red Ethernet IndustrialDocumento2 páginasElementos de Una Red Ethernet IndustrialelpapirruquiAún no hay calificaciones
- Entradas Salidas DiscretasDocumento13 páginasEntradas Salidas DiscretasMijael Ramos Barrientos100% (1)
- Como Hacer Reloj DigitalDocumento9 páginasComo Hacer Reloj DigitalSusy VillafanAún no hay calificaciones
- Conclusión: Poseen Dos Estados Estables: .: Circuitos Biestables o Flip-Flop (FF)Documento12 páginasConclusión: Poseen Dos Estados Estables: .: Circuitos Biestables o Flip-Flop (FF)Francisco RomeroAún no hay calificaciones
- Control Digital Motor DCDocumento23 páginasControl Digital Motor DCantonyglzAún no hay calificaciones
- Informe GrafcetDocumento19 páginasInforme GrafcetJohann Smith Aranda RamosAún no hay calificaciones
- Manual Lvdac EmsDocumento69 páginasManual Lvdac EmsGuerrero Pegariuz Pineda IglesiasAún no hay calificaciones
- Protocolos de Comunicacion para PLC'sDocumento18 páginasProtocolos de Comunicacion para PLC'sOmar WasdAún no hay calificaciones
- Reporte Practica 1 Electronica DigitalDocumento10 páginasReporte Practica 1 Electronica DigitalSelinaAún no hay calificaciones
- Ejercicios Resueltos Grafcet PDFDocumento3 páginasEjercicios Resueltos Grafcet PDFLaura Mayara Proenza GonzálezAún no hay calificaciones
- Ejercicios Resueltos de LOGODocumento14 páginasEjercicios Resueltos de LOGODocente 361 UMECITAún no hay calificaciones
- Cuestionario ScadaDocumento6 páginasCuestionario ScadaRuben Poma100% (1)
- Automatización Reporte (Semaforo)Documento17 páginasAutomatización Reporte (Semaforo)Luis MGAún no hay calificaciones
- BRAZO-ROBOT Con MatlabDocumento13 páginasBRAZO-ROBOT Con MatlabOmar De La Cruz Arciniega100% (1)
- Memoria CGROMDocumento5 páginasMemoria CGROMManuel Beltran NoguesAún no hay calificaciones
- Principios Del Hardware de Entrada y SalidaDocumento15 páginasPrincipios Del Hardware de Entrada y SalidaIbeth Hernandez100% (2)
- Automatismos Secuenciales Con GrafcetDocumento32 páginasAutomatismos Secuenciales Con GrafcetAlvaro Alonso Hernandez SierraAún no hay calificaciones
- Temporizadores y Contadores Siemens Step7Documento18 páginasTemporizadores y Contadores Siemens Step7Ramses UrbinaAún no hay calificaciones
- Valores KP, Ki y KD para Un Controlador PIDDocumento5 páginasValores KP, Ki y KD para Un Controlador PIDalbertomc86Aún no hay calificaciones
- Lab N°4 - CPBMDocumento10 páginasLab N°4 - CPBMcristhianAún no hay calificaciones
- Laboratorio1 - Teórico ControlDocumento14 páginasLaboratorio1 - Teórico ControlCarlos CubasAún no hay calificaciones
- Informe Ascensor - REDES INDUSTRIALESDocumento32 páginasInforme Ascensor - REDES INDUSTRIALESJuan Pablo PoloAún no hay calificaciones
- Arquitectura At89c52Documento53 páginasArquitectura At89c52ernesto100% (3)
- Intouch ProgramacionDocumento22 páginasIntouch ProgramacionYonel Silva PariAún no hay calificaciones
- Diagrama de Bloques PDFDocumento24 páginasDiagrama de Bloques PDFJherson Miranda CabanillasAún no hay calificaciones
- Scada PresentacionDocumento24 páginasScada PresentacionjoapmeAún no hay calificaciones
- Newton EulerDocumento32 páginasNewton EulerEduardo CoralAún no hay calificaciones
- Sistemas Lineales e Invariantes en El TiempoDocumento13 páginasSistemas Lineales e Invariantes en El TiempoReyes Sixto AlejandroAún no hay calificaciones
- Motor DSPICDocumento10 páginasMotor DSPICGustavo Choque CuevaAún no hay calificaciones
- Comunicación Serial para Controlar La Velocidad de Un Motor de CD enDocumento22 páginasComunicación Serial para Controlar La Velocidad de Un Motor de CD enDirce BaltazarAún no hay calificaciones
- CONTROL PID APLICADO SOBRE Variador Con Tia Portal 11 PDFDocumento6 páginasCONTROL PID APLICADO SOBRE Variador Con Tia Portal 11 PDFbenditasea3352Aún no hay calificaciones
- Control de Motor EncoderDocumento29 páginasControl de Motor Encodercymonso100% (15)
- LAB2Documento12 páginasLAB2Jesús HAún no hay calificaciones
- El Control Digital en La IndustriaDocumento8 páginasEl Control Digital en La IndustriaJuan GalvesAún no hay calificaciones
- Automatizacion Del Transporte de Carga - Luis Fernando Vargas CandiaDocumento21 páginasAutomatizacion Del Transporte de Carga - Luis Fernando Vargas Candialuisvargasc66Aún no hay calificaciones
- Control de Velocidad y Posición de Un Motor DCDocumento56 páginasControl de Velocidad y Posición de Un Motor DCromulozg100% (1)
- Actividad Complementaria 1Documento9 páginasActividad Complementaria 1Bläncä RämÖsAún no hay calificaciones
- Programacion de Aplicaciones EMTRAFESADocumento37 páginasProgramacion de Aplicaciones EMTRAFESACESAR_CASTILLOHAún no hay calificaciones
- Aplicación de La Teoría de GrafosDocumento4 páginasAplicación de La Teoría de GrafosRoselys Fonseca DiazAún no hay calificaciones
- Mapa ConceptualDocumento2 páginasMapa ConceptualJosue Arias.Aún no hay calificaciones
- Dispositivos de AlmacenamietoDocumento7 páginasDispositivos de Almacenamietoelian mercadoAún no hay calificaciones
- Exposicion Del TecladoDocumento9 páginasExposicion Del Tecladoderly natalia lara laraAún no hay calificaciones
- Como Hacer Tu Propio USB JIG para Los Samsung Galaxy - Androsapiens PDFDocumento39 páginasComo Hacer Tu Propio USB JIG para Los Samsung Galaxy - Androsapiens PDFIllich González BuenoAún no hay calificaciones
- Trabajo Práctico N°2 D&D WebDocumento10 páginasTrabajo Práctico N°2 D&D WebCatalina SequeiraAún no hay calificaciones
- Gnuplot TutDocumento28 páginasGnuplot TutErith Alexander MuñozAún no hay calificaciones
- Léame de InDesign CS4Documento6 páginasLéame de InDesign CS4recojo1Aún no hay calificaciones
- Manual SGAFotDocumento23 páginasManual SGAFotLuis SantafeAún no hay calificaciones
- Trabajo 6 - GRUPO 1Documento37 páginasTrabajo 6 - GRUPO 1Roland0Aún no hay calificaciones
- Trabajo de InformaticaDocumento8 páginasTrabajo de InformaticaindrianiAún no hay calificaciones
- Manual de Reloj Empresarial DICONDocumento29 páginasManual de Reloj Empresarial DICONNilton Chavez0% (1)
- Tema 7Documento7 páginasTema 7Tamara Amayas AlvarezAún no hay calificaciones
- Manual de Registro y Aplicación en WorcketDocumento16 páginasManual de Registro y Aplicación en Worcketd.sanhueza0412Aún no hay calificaciones
- Universidad Del IstmoDocumento6 páginasUniversidad Del IstmoYamitzu Cheryl Concepción GonzálezAún no hay calificaciones
- Examen 11Documento3 páginasExamen 11Ayllen TámaraAún no hay calificaciones
- ¿Qué Es Accesibilidad Web o UX Claves para La Inclusión.Documento5 páginas¿Qué Es Accesibilidad Web o UX Claves para La Inclusión.barbarabizzarri2Aún no hay calificaciones
- Bases Datos GeograficasDocumento48 páginasBases Datos GeograficasSuriel Salazar TrejoAún no hay calificaciones
- Office 365 y Servicios en La NubeDocumento3 páginasOffice 365 y Servicios en La NubeAndrea AlfaroAún no hay calificaciones
- Programa de Clases Estrucura de Datos y Algoritmo IDS343-01 - v01Documento3 páginasPrograma de Clases Estrucura de Datos y Algoritmo IDS343-01 - v01Worldlatinstar 00Aún no hay calificaciones
- Crip Tom One DasDocumento5 páginasCrip Tom One DasValeria CTAún no hay calificaciones
- Administración y Control de Un ArchivoDocumento2 páginasAdministración y Control de Un ArchivoAndy Nelson MacarioAún no hay calificaciones
- El Subneteo en RedesDocumento5 páginasEl Subneteo en RedesFreddy Yulan MenendezAún no hay calificaciones
- Enunciado Caso de UsoDocumento1 páginaEnunciado Caso de UsoEdiccson Manuel Quiroz HoyosAún no hay calificaciones
- Contratacion Cuenta DigitalDocumento10 páginasContratacion Cuenta DigitalContabilidad UNICLA AcámbaroAún no hay calificaciones