También podría gustarte
- Estadística Inferencial Actividad 1: María Luisa Martinez Aguilar Ana Gladys Robles MundoDocumento11 páginasEstadística Inferencial Actividad 1: María Luisa Martinez Aguilar Ana Gladys Robles MundoMaría Lu MartinezAún no hay calificaciones
- Importancia Investigacion en Ing CivilDocumento2 páginasImportancia Investigacion en Ing CivilFelix Santiago86% (7)
- DELMAG D12 EspecificacionesDocumento4 páginasDELMAG D12 EspecificacionesFelix Santiago100% (3)
- Fallas en Planos y EspecificacionesDocumento4 páginasFallas en Planos y EspecificacionesFelix SantiagoAún no hay calificaciones
- Codigos y Reglam de SeguridadDocumento10 páginasCodigos y Reglam de SeguridadFelix SantiagoAún no hay calificaciones
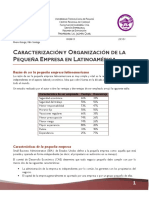
- Resumen1 - Pequeña Empresa en LatinoamericaDocumento7 páginasResumen1 - Pequeña Empresa en LatinoamericaFelix SantiagoAún no hay calificaciones
- TAREA 2 Fallas en Planos y Especificaciones1Documento4 páginasTAREA 2 Fallas en Planos y Especificaciones1Felix SantiagoAún no hay calificaciones
- Fallas en CimentacionesDocumento4 páginasFallas en CimentacionesFelix SantiagoAún no hay calificaciones
- Responsabilidad de Persona Idonea ConstruccionDocumento15 páginasResponsabilidad de Persona Idonea ConstruccionFelix SantiagoAún no hay calificaciones
- Resumen Sistemas BiologicosDocumento2 páginasResumen Sistemas BiologicosFelix SantiagoAún no hay calificaciones
- Bocatermica Resumen EjecutivoDocumento39 páginasBocatermica Resumen EjecutivoFelix SantiagoAún no hay calificaciones
- CAPITULODESCRIPCIONDELPROYECTODocumento139 páginasCAPITULODESCRIPCIONDELPROYECTOFelix SantiagoAún no hay calificaciones
- Aspectos Termodinámicos de Los Sistemas BiológicosDocumento1 páginaAspectos Termodinámicos de Los Sistemas BiológicosFelix SantiagoAún no hay calificaciones
- Tarea 1Documento3 páginasTarea 1Felix SantiagoAún no hay calificaciones
- Laboratorio Ondas EstacionariasDocumento12 páginasLaboratorio Ondas EstacionariasFelix Santiago100% (1)
- Tarea 9 MitradelDocumento6 páginasTarea 9 MitradelFelix SantiagoAún no hay calificaciones
- Carro de AvanceDocumento4 páginasCarro de AvanceFelix SantiagoAún no hay calificaciones
- Anteproyecto EcologiaDocumento5 páginasAnteproyecto EcologiaFelix SantiagoAún no hay calificaciones
- Analisis de Los Caudales de DiseñoDocumento19 páginasAnalisis de Los Caudales de DiseñoRichard CabreraAún no hay calificaciones
- Ejercicios Método Simplex IODocumento9 páginasEjercicios Método Simplex IOLINA MARIA URREGO LOZANOAún no hay calificaciones
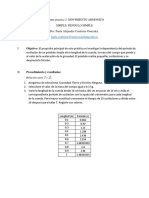
- Matemática Segundo Proyecto 7Documento3 páginasMatemática Segundo Proyecto 7Fernanda ZhingriAún no hay calificaciones
- Portafolio 1 MATE IVDocumento5 páginasPortafolio 1 MATE IVCristian Carrillo SoteloAún no hay calificaciones
- Proporciones Septimo Basico (CON EJEMPLOS)Documento5 páginasProporciones Septimo Basico (CON EJEMPLOS)Mireya Rojas P.Aún no hay calificaciones
- Momento 3Documento4 páginasMomento 3Cristian DiazAún no hay calificaciones
- Uso de Parentesis y FormulasDocumento8 páginasUso de Parentesis y Formulasarlex garzon gomezAún no hay calificaciones
- Aristóteles - Metafísica. Libro I. La Admiración Como Punto de Partida de La FilosofíaDocumento3 páginasAristóteles - Metafísica. Libro I. La Admiración Como Punto de Partida de La FilosofíaWilliam SantamariaAún no hay calificaciones
- Collage Carte SIDocumento3 páginasCollage Carte SIChristian Paul Fausto RuizAún no hay calificaciones
- P12. Momento de Inercia de Una PoleaDocumento1 páginaP12. Momento de Inercia de Una PoleagonzalosiebenAún no hay calificaciones
- Capitulo 1Documento43 páginasCapitulo 1MarcoAún no hay calificaciones
- Matematica 4° D L.Quiroga 19 05 20Documento7 páginasMatematica 4° D L.Quiroga 19 05 20Claudia MoralesAún no hay calificaciones
- Estructuras IsostaticasDocumento238 páginasEstructuras IsostaticasROBERTO HERNANDEZ100% (1)
- Reglas de ExpresionDocumento5 páginasReglas de Expresionana100% (1)
- Antología Saberes y Pensamiento CientíficoDocumento34 páginasAntología Saberes y Pensamiento CientíficoJuan Vergara100% (1)
- Informe 1Documento11 páginasInforme 1paula contrerasAún no hay calificaciones
- Parte IDocumento5 páginasParte Ichoco rramoAún no hay calificaciones
- Exposicion Valo Esperado y Arbol de DesicionesDocumento8 páginasExposicion Valo Esperado y Arbol de DesicionesCA PCAún no hay calificaciones
- Leccion 13 PLMDocumento6 páginasLeccion 13 PLMVale VergaraAún no hay calificaciones
- Guía de Trabajos Prácticos Nº2 - Cinemática MDocumento7 páginasGuía de Trabajos Prácticos Nº2 - Cinemática MGerardo RomeroAún no hay calificaciones
- Sistema de FrenosDocumento269 páginasSistema de FrenosCAR6Aún no hay calificaciones
- Asignación de AulasDocumento6 páginasAsignación de AulasalferguzAún no hay calificaciones
- Algunos Principios Del Islam y Compararlos Con Otras ReligionesDocumento5 páginasAlgunos Principios Del Islam y Compararlos Con Otras ReligionesJorge Armando Carranza Yulán0% (1)
- GiroscopioDocumento6 páginasGiroscopioamodonenoAún no hay calificaciones
- Coeficientes IndeterminadosDocumento2 páginasCoeficientes Indeterminadosjdac149Aún no hay calificaciones
- ARITMETICADocumento3 páginasARITMETICAStefany VargasAún no hay calificaciones
- Control Quinto DecimalesDocumento2 páginasControl Quinto DecimalesEsteban Alejandro Navea Echeverria100% (1)
- Calcular La Admision ICFES A La UN Primer Periodo 2021Documento2 páginasCalcular La Admision ICFES A La UN Primer Periodo 2021Juan Carlos Riveros MedinaAún no hay calificaciones
- Modelos de Planeacion1Documento19 páginasModelos de Planeacion1jorgemerinoAún no hay calificaciones