También podría gustarte
- Tema 03 MOLD ETF M-IAF UnlockedDocumento15 páginasTema 03 MOLD ETF M-IAF Unlockedjtelmo1Aún no hay calificaciones
- Presentación Temas 5-8Documento64 páginasPresentación Temas 5-8jtelmo1Aún no hay calificaciones
- Examen Mecanica de Fluidos Modelo BDocumento10 páginasExamen Mecanica de Fluidos Modelo Bjtelmo1Aún no hay calificaciones
- Pec CmoDocumento37 páginasPec Cmojtelmo1Aún no hay calificaciones
- MF - Modelo BDocumento10 páginasMF - Modelo Bjtelmo1Aún no hay calificaciones
- Practica 3 Sol 2020 21Documento5 páginasPractica 3 Sol 2020 21jtelmo1Aún no hay calificaciones
- Clase 1 Tema5 2019-20Documento31 páginasClase 1 Tema5 2019-20jtelmo1Aún no hay calificaciones
- mf01 t6 TrabDocumento4 páginasmf01 t6 Trabjtelmo1Aún no hay calificaciones
- Clase Tema6 v2Documento17 páginasClase Tema6 v2jtelmo1Aún no hay calificaciones
- Presentación Tema 3 y 4Documento48 páginasPresentación Tema 3 y 4jtelmo1Aún no hay calificaciones
- 01-Principios Físicos de La Neumática Apuntes AVDocumento21 páginas01-Principios Físicos de La Neumática Apuntes AVjtelmo1Aún no hay calificaciones
- Tema 4Documento43 páginasTema 4jtelmo1Aún no hay calificaciones
- Tema 2Documento22 páginasTema 2jtelmo1Aún no hay calificaciones
- Tema 1Documento25 páginasTema 1jtelmo1Aún no hay calificaciones
- Tema 3Documento21 páginasTema 3jtelmo1Aún no hay calificaciones
- Presentación Tema 2Documento29 páginasPresentación Tema 2jtelmo1Aún no hay calificaciones
- Propuesta MICROGRADO EN ESTRATEGIAS FRENTE AL CAMBIO CLIMÁTICO Tras AlegacionesDocumento6 páginasPropuesta MICROGRADO EN ESTRATEGIAS FRENTE AL CAMBIO CLIMÁTICO Tras Alegacionesjtelmo1Aún no hay calificaciones
- SanidadMilitar ElmilitarquemadoDocumento13 páginasSanidadMilitar Elmilitarquemadojtelmo1Aún no hay calificaciones
- Programacion DNS Y LESDocumento3 páginasProgramacion DNS Y LESjtelmo1Aún no hay calificaciones
- 3 Les-1Documento45 páginas3 Les-1jtelmo1Aún no hay calificaciones
- 0 PresentaciónDocumento7 páginas0 Presentaciónjtelmo1Aún no hay calificaciones
- Refuerzo Operaciones Combinadas PDFDocumento9 páginasRefuerzo Operaciones Combinadas PDFROMENAR1Aún no hay calificaciones
- PROYECTOS DE EXAMEN MatemáticasDocumento8 páginasPROYECTOS DE EXAMEN MatemáticasCliffor Jerry Herrera CastrilloAún no hay calificaciones
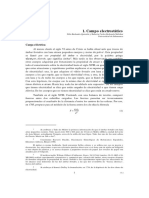
- Campo Electrostatico - Felix Redondo QuintelaDocumento41 páginasCampo Electrostatico - Felix Redondo QuintelaLucius Thales da SilvaAún no hay calificaciones
- Circular Finalización Año Escolar 2022Documento1 páginaCircular Finalización Año Escolar 2022diana marcela diaz riascosAún no hay calificaciones
- Unidad 04 Ecuaciones de Primer y Segundo Grado Con Una IncognitaDocumento1 páginaUnidad 04 Ecuaciones de Primer y Segundo Grado Con Una IncognitaLuciana RejasAún no hay calificaciones
- San Agustín, Rodolfo - Notas GeometríaDocumento87 páginasSan Agustín, Rodolfo - Notas GeometríaChundomanXAún no hay calificaciones
- ACTIVIDAD FINAL - Calculo San MateoDocumento6 páginasACTIVIDAD FINAL - Calculo San MateoJaider MaciasAún no hay calificaciones
- Poligonos Propiedades y EjerciciosDocumento3 páginasPoligonos Propiedades y Ejerciciosreymen90% (10)
- Trabajo 1 CVE 2018 IDocumento3 páginasTrabajo 1 CVE 2018 IManuel Calderón Cabanillas0% (1)
- Potenciación RadicaciónDocumento4 páginasPotenciación Radicaciónabraham arevaloAún no hay calificaciones
- Taller 1 Geometria EuclidianaDocumento5 páginasTaller 1 Geometria EuclidianaLuchoGaviriaLópezAún no hay calificaciones
- Ejercicios 5Documento3 páginasEjercicios 5Carlos Raúl Zárate VelázquezAún no hay calificaciones
- Pa3 Calculo DiferencialDocumento9 páginasPa3 Calculo DiferencialJORGE REINALDO QUISPE AYERBEAún no hay calificaciones
- Esquema Formulario PDFDocumento129 páginasEsquema Formulario PDFLucho H. G.0% (2)
- Area de Figuras CompuestasDocumento16 páginasArea de Figuras Compuestasrodrigoxs123Aún no hay calificaciones
- Fracciones y DecimalesDocumento64 páginasFracciones y DecimalesAuber7Aún no hay calificaciones
- RM Virtual MedranoDocumento4 páginasRM Virtual MedranoAndy HuillcaAún no hay calificaciones
- Matemäticas 1 Semana 10 Ciclo 2022-2023 Sec#!Documento8 páginasMatemäticas 1 Semana 10 Ciclo 2022-2023 Sec#!Anyela GrishelAún no hay calificaciones
- LogaritmosDocumento8 páginasLogaritmosCarlos Eduardo Ruiz MendozaAún no hay calificaciones
- Problemas de TrigonometriaDocumento3 páginasProblemas de TrigonometriaJimy Lopez100% (1)
- Ecuacioes 001Documento8 páginasEcuacioes 001miguel_giraldo_10Aún no hay calificaciones
- Taller Recuperacion 9Documento4 páginasTaller Recuperacion 9Julio MoyaAún no hay calificaciones
- Aritmetica Basica Secundaria PDFDocumento154 páginasAritmetica Basica Secundaria PDFAbraham Gutierrez Dguez0% (1)
- Matematicas 4 EVALUACION TRIMESTRE 2 ALUMNODocumento5 páginasMatematicas 4 EVALUACION TRIMESTRE 2 ALUMNOAnnAún no hay calificaciones
- Problemas 11.4-12-01-2024-1Documento1 páginaProblemas 11.4-12-01-2024-1Cesar GrijalvaAún no hay calificaciones
- Angulos Orientados Ficha 3Documento3 páginasAngulos Orientados Ficha 3matesdemanu100% (1)
- Guia de Trabajo Limite de Una FuncionDocumento4 páginasGuia de Trabajo Limite de Una FuncionSolano JJAún no hay calificaciones
- Figuras Planas PoligonosDocumento5 páginasFiguras Planas PoligonosElhombre Dela EstrellaAún no hay calificaciones
- 3 Potencias y RaicesDocumento2 páginas3 Potencias y RaicesCristina PalmeiroAún no hay calificaciones
- Ejercicio Curvas de Transición Noviembre 2018Documento4 páginasEjercicio Curvas de Transición Noviembre 2018RafaRodriguezAún no hay calificaciones