Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Trabajo Robotica Final
Trabajo Robotica Final
Cargado por
Freddy Wuilmer Machaca CalizayaDerechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Trabajo Robotica Final
Trabajo Robotica Final
Cargado por
Freddy Wuilmer Machaca CalizayaCopyright:
Formatos disponibles
TRABAJO ENCARGADO DE ROBOTICA II
Presentado por:
FREDDY WUILMER
MACHACA CALIZAYA
OLIVER MACHACA PAUCAR
C
A
R
A
C
T
E
R
I
S
T
I
C
A
S
D
E
B
R
A
Z
O
S
R
O
B
O
T
D
E
L
A
S
M
A
R
C
A
S
A
B
B
Y
M
O
T
O
M
A
!
"
#
!
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
1
3
Presentado por:
FREDDY WUILMER
MACHACA CALIZAYA
OLIVER MACHACA PAUCAR
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
UNIVERSIDAD ANDINA
NESTOR CACERES VELASQUEZ
FACULTAD DE INGENIERIAS Y CIENCIAS PURAS
CARRERA ACADEMICO PROPFESIONAL DE INGENIERIA MECATRONICA
TEMA:
CARACTERISTICAS Y DESCRIPCIO DE LOS BRAZOS ROBOT
SOLDADOR$ PITOR Y PROTECCIO IP DE LAS MARCAS ABB Y
MOTOMA%
Presentado por: FREDDY WUILMER MACHACA CALIZAYA
OLIVER MACHACA PAUCAR
DOCETE: Ing. LUIS ALBERTO ZAPATA OJEDA
Se&estre: IX
PUNO, DICIEMBRE !1
TRABAJO ENCARGADO DE
ROBOTICA II
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
Conten'do
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
DEDICATORIA Y A(RADECIMIETO
Dedico este trabajo de investigacin a Dios ! a
"is #adres$ A Dios #or%&e 'a estado con"igo a
cada #aso %&e do!( c&id)ndo"e ! d)ndo"e
*orta+e,a #ara contin&ar( a "is #adres( %&ienes
a +o +argo de "i vida 'an ve+ado #or "i bienestar
! ed&cacin siendo "i a#o!o en todo "o"ento$
De#ositando s& entera con*ian,a en cada reto
%&e se "e #resentaba sin d&dar ni &n so+o
"o"ento en "i inte+igencia ! ca#acidad$ Es #or
e++os %&e so! +o %&e so! a'ora$ Los a"o con "i
vida$
TRABAJO ENCARGADO DE
ROBOTICA II
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
-$ INTROD.CCI/N$
0a! "&c'os trabajos %&e +as #ersonas no +es g&sta 'acer( sea !a #or ser
ab&rrido o bien #e+igroso( sie"#re se va a tratar de evitar #ara no 'acer+o$ La
so+&cin ")s #r)ctica era ob+igar a a+g&ien #ara %&e 'iciera e+ trabajo( esto se
+e ++a"a esc+avit&d ! se &saba do"inan a+ d1bi+$ #r)ctica"ente en todo e+
"&ndo bajo +a #o+2tica de %&e e+ *&erte ! e+ #oder$
A'ora +os robots son idea+es #ara trabajos %&e re%&ieren "ovi"ientos
re#etitivos ! #recisos$ .na ventaja #ara +as e"#resas es %&e +os '&"anos
necesitan descansos( sa+arios( co"ida( dor"ir( ! &na )rea seg&ra #ara trabajar(
+os robots no$ La *atiga ! ab&rri"iento de +os '&"anos a*ectan directa"ente a
+a #rod&ccin de &na co"#a32a( +os robots n&nca se ab&rren #or +o tanto s&
trabajo va a ser e+ "is"o desde %&e abra +a co"#a32a a +as 4566 AM 'asta +as
75668M$
E+ noventa #or ciento de robots trabajan en *)bricas( ! ")s de +a "itad 'acen
a&to"vi+es$ Las co"#a32as de carros son tan a+ta"ente a&to"ati,adas %&e +a
"a!or2a de +os '&"anos s&#ervisan o "antienen +os robots ! otras ")%&inas$
Otro ti#o de trabajo #ara &n robot es barajar( dividir( 'acer( etc$ en *)bricas de
co"idas$ 8or eje"#+o( en &na *)brica de c'oco+ates +os robots ar"an +as cajas
de c'oco+ates$ 9C"o +o 'acen: Son g&iados #or &n siste"a de visin( &n
bra,o robtico %&e +oca+i,a cada #ie,a de c'oco+ate ! de *or"a genti+ sin da3ar
a+ #rod&cto +o se#ara ! divide$
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
;$ 8RESENTACION5
.no de +os #i+ares %&e s&stenta a +a robtica es +a *or"acin #ara conseg&ir s&
b&en *&nciona"iento ! &na *)ci+ ace#tacin #or #arte de+ &s&ario( ade")s de
ser &n as#ecto "&! i"#ortante #ara obtener e+ ")<i"o rendi"iento de +os
e%&i#os$
Co"o res#&esta a estas necesidades( e+ =rea de >or"acin de Robtica de
Asea Bro?n Boveri( S$A$ o*rece( &na ga"a de c&rsos orientados a +a *or"acin
de +os &s&arios de +os robots ABB( tanto en s& #rogra"acin co"o en s&
"anteni"iento$
Los c&rsos constan de dos #artes5 &na #arte terica en donde se introd&ce a+
a+&"no en e+ te"a de+ c&rso ! otra #r)ctica en donde #&ede #oner en #r)ctica
+o %&e 'a asi"i+ado en +as c+ases tericas$
Cree"os %&e e+ contacto de+ a+&"no con e+ robot es e+ "ejor "1todo #ara
a#render ! entender e+ "&ndo de +a robtica( !a %&e +as #r)cticas #er"iten
si"&+ar +os #rob+e"as %&e se va a encontrar c&ando este trabajando con s&s
robots$
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
@$ DE>INICION5
ROBTICA $
E+ t1r"ino robtica #rocede de +a #a+abra robot$ La robtica es( #or +o
tanto( +a
ciencia o ra"a de +a ciencia %&e se oc&#a de+ est&dio( desarro++o !
a#+icaciones de +os robots$
Otra de*inicin de robtica es e+ dise3o( *abricacin ! &ti+i,acin de
")%&inas a&to")ticas #rogra"ab+es con e+ *in de rea+i,ar tareas
re#etitivas co"o e+ ensa"b+e de a&to"vi+es( a#aratos( etc$ ! otras
actividades$ B)sica"ente( +a robtica se oc&#a de todo +o concerniente
a +os robots( +o c&a+ inc+&!e e+ contro+ de "otores( "ecanis"os
a&to")ticos ne&")ticos( sensores( siste"as de c"#&tos( etc$
En +a robtica se aAnan #ara &n "is"o *in varias disci#+inas a*ines(
#ero di*erentes( co"o +a Mec)nica( +a E+ectrnica( +a A&to")tica( +a
In*or")tica( etc$
E+ t1r"ino robtica se +e atrib&!e a Isaac Asi"ov$ Los tres #rinci#ios o
+e!es de +a robtica segAn Asi"ov son5
.n robot no #&ede +asti"ar ni #er"itir %&e sea +asti"ado ningAn
ser '&"ano$
E+ robot debe obedecer a todas +as rdenes de +os '&"anos
e<ce#to +as %&e contraigan +a #ri"era +e!$(
E+ robot debe a&to#rotegerse( sa+vo %&e #ara 'acer+o entre en
con*+icto con +a #ri"era o seg&nda +e!$
ROBOTS.
Los robots son dis#ositivos co"#&estos de sensores %&e reciben
datos de entrada ! %&e #&eden estar conectados a +a co"#&tadora$
Esta( a+ recibir +a in*or"acin de entrada( ordena a+ robot %&e e*ectAe
&na deter"inada accin$ 8&ede ser %&e +os #ro#ios robots dis#ongan
de "icro#rocesadores %&e reciben e+ in#&t de +os sensores ! %&e estos
"icro#rocesadores ordenen a+ robot +a ejec&cin de +as acciones #ara
+as c&a+es est) concebido$ En este A+ti"o caso( e+ #ro#io robot es a s&
ve, &na co"#&tadora$
Robot ind&stria+5 Nace de +a &nin de &na estr&ct&ra "ec)nica
artic&+ada ! de &nsiste"a e+ectrnico de contro+ en e+ %&e se integra
&na co"#&tadora$ Esto #er"ite +a #rogra"acin ! contro+ de +os
"ovi"ientos a e*ect&ar #or e+ robot ! +a "e"ori,acin de +as diversas
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
sec&encias de trabajo( #or +o %&e +e da a+ robot &na gran *+e<ibi+idad !
#osibi+ita s& ada#tacin a "&! diversas tareas ! "edios de trabajo
$
Brazo robtico
.na de +as #artes co"#onentes de+ "ani#&+ador$ Incor#orado en +a
base de 1ste( sostiene ! "aneja +a "&3eca Bdonde va insta+ado e+
dis#ositivo de agarreC$
Que es un robot industria !
De"inicin de robot industria#
DM)%&ina de "ani#&+acin a&to")tica( re#rogra"ab+e ! "&+ti*&nciona+
sin necesidad de "odi*icar s& estr&ct&ra *2sica( con tres o "1sejes %&e
#&eden #osicionar ! orientar "aterias( #ie,as( 'erra"ientas o
dis#ositivos es#ecia+es #ara +a ejec&cin de diversos trabajos en +as
di*erentes eta#as de +a #rod&ccin ind&stria+( !a sea en &na #osicin
*ija o en "ovi"ientoD$
$ri%eros robots industriaes
E+ #ri"er robot ind&stria+ se insta+o en -E7- en &na *abrica de Fenera+
Motors en Ne? Gerse!$
Los #ri"eros robots eran 'idr)&+icos( o sea( +os acciona"ientos de +os
ejes eran 'idr)&+icos$
E+ siste"a de contro+ contro+aba +os "ovi"ientos de+ robot %&e se
ejec&taban de &na *or"a sec&encia+$
E+ #rogra"a se a+"acenaba en &n ta"bor "agn1tico %&e a+"acenaba
'asta H666 #asos de #rogra"a$
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
Robots Industriaes Actuaes#
Son robots tota+"ente e+1ctricos( o sea( s&s "ovi"ientos est)n generados
#or "otores e+1ctricos$
E+ siste"a de contro+ se basan en siste"as "&+ti#rocesador( con &n
#rocesador es#eci*ico #ara cada s&bsiste"a
Las tra!ectorias a&too#ti"i,an#ara obtener +as ")<i"as #restaciones de+
siste"a en cada "o"ento en *&ncin de +as circ&nstancias$
Los #rogra"as se a+"acenan en disco d&ro o #or red en &n dis#ositivo
e<terno
Estadsticas de robots.
N&%ero de robots 'or cada ()))) traba*adores
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
C+ADRO DE ,AS -A.ORES A$,ICACIONES EN ,OS ROBOT EN E, /))0 . /))1
(2 SO,DAD+RA 32 -ONTAJE
/2 -ANEJO 42TRANS5OR-ACION
62 DIS$ENSACIN 72 OTROS SIN ES$ECI5ICAR
$ar8ue de robots de estado es'a9o#
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
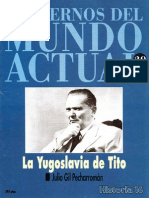
Cuota de %ercado en e a9o /)()
ABB --HIH
J.JA 7H76
>AN.C KHHH
MOTOMAN -H7;
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
Bra,o robot de+ ti#o so+dador de
+as "arcas ABB Y MOTOMAN
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
BRA:O ROBOT DE TI$O SO,DADOR ABB ; IRB(4/ID
$
E+ n&evo IRB -K;6ID es &n robot #ara so+dad&ra arco de a+ta #recisin( con
con*ig&racin de #roceso integrada( %&e co"bina +a #rod&ccin d&rante todo e+
d2acon &na red&ccin de+ K6L en e+ coste de "anteni"iento #ara o*recer e+
"enor coste #or cordn de so+dad&ra de s& categor2a$
4 de *uio de /)(/
ABB Robotics 'a #resentado e+ n&evo IRB -K;6ID( &n robot de a+tas
#restaciones con con*ig&racin de #roceso integrada( dise3ado es#ecia+"ente
#ara +a so+dad&ra arco$ Todos +os cab+es ! "ang&eras disc&rren #or e+ interior
de+ bra,o s&#erior( si"#+i*icando +a #rogra"acin ! #ro#orcionando &na
#roteccin #ti"a de todo e+ cab+eado de #roceso( co"o +a #otencia ! e+ 'i+o de
so+dad&ra( e+ gas de #roteccin ! e+ aire co"#ri"ido$
E+ dise3o de+ #a%&ete de "ang&eras tota+"ente integrado a&"enta +a
#recisin( #ro+onga +a vida de +as "ang&eras en &n K6L ! #er"ite "ovi"ientos
")s *+e<ib+es( co"o +os %&e se necesitan #ara so+dad&ras de &n so+o
"ovi"iento en torno a objetos ci+2ndricos o cordones de so+dad&ra con &n
acceso di*2ci+$ E%&i#ado con tecno+og2a ABB Tr&eMoveM de seg&nda
generacin( e+ IRB -K;6ID consig&e +a ")<i"a #recisin de tra!ectoria en +a
categor2a de +os robots de so+dad&ra arco +igeros$ Con &n radio de trabajo de
-(K "etros ! &na ca#acidad de carga de H Ng( e+ robot #&ede "ontarse en e+
s&e+o o invertido( +o %&e #er"ite &na a"#+ia ga"a de con*ig&raciones de
#rod&ccinO Los *abricantes %&e necesitan so+dad&ra arco a&to")tica tienen
a'ora &na *or"a ")s *)ci+ de "ejorar a so+&ciones robticas gracias a+ IRB
-K;6IDO( a*ir"a e+ director de #rod&ccin de ABB$ OSe trata de &n robot "&!
co"#acto ! e<tre"ada"ente #reciso( ! c&enta con &na aso"brosa *aci+idad de
integracin P
E+ IRB -K;6ID ta"bi1n incor#ora +a .nidad de 8rogra"acin >+e<8endant de
ABB$ Con #ocos botones ! &na inter*a, gr)*ica e int&itiva( en varios idio"as( +a
>+e<8endant #&eda ser a &ti+i,ada #or o#erarios con &na *or"acin "2ni"a$ Le
res&+tar) *a"i+iar a c&a+%&iera %&e 'a! &ti+i,ado &n 8C$
La inter*a, de +a so+dad&ra ta"bi1n est) co"#+eta"ente integrada #ara %&e +os
&s&arios tengan &n contro+ tota+ de +a tensin( +a intensidad( +a ve+ocidad( e+
ca&da+ de gas ! otros #ar)"etros de +a so+dad&ra desde +a #ro#ia inter*a,
gr)*ica de+ robot$
Los &s&arios de+ IRB -K;6ID ta"bi1n #&eden acceder a todas +as ventajas de+
Servicio a distancia de ABB( &n siste"a %&e o*rece acceso re"oto a+ siste"a
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
de so+dad&ra arco %&e #er"ite e+ contro+ de +a #rod&ccin( diagnstico r)#ido !
"anteni"iento #redictivo$
$
E+ n&evo robot IRB -K;6ID ! e+ contro+ador IRCK c&entan con e+ #+eno res#a+do
de +a organi,acin internaciona+ de ventas ! servicios de ABB Robotics en K@
#a2ses ! en ")s de-66 e"#+a,a"ientos$
E robot es'ec<"ico 'ara sodadura arco#
En e+ IRB -K;6ID BIntegrated DressingC( e+ #a%&ete de "ang&eras est)
tota+"ente integrado en e+ bra,o s&#erior ! a trav1s de +a base de+ robot$ Esto
signi*ica %&e todos +os "edios necesarios #ara +a so+dad&ra arco( co"o +a
#otencia( e+ 'i+o de so+dad&ra( e+ gas de #roteccin ! e+ aire co"#ri"ido( est)n
orientados #ara conseg&ir +as "ejores #restaciones ! e*iciencia energ1tica$ E+
IRB -K;6ID #ro#orciona &na so+dad&ra estab+e( e<ce+ente #recisin de
tra!ectoria( red&ccin en e+ tie"#o de cic+o ! &na "a!or d&rabi+idad de+ #a%&ete
de "ang&eras$ Fracias a +a con*ig&racin integrada( #&eden e*ect&arse
so+dad&ras en torno a objetos ci+2ndricos sin ning&na #arada ! con &na "a!or
*aci+idad de acceso a es#acios red&cidos
Instaacin "e=ibe.
Con &na ca#acidad de carga de H Ng ! &n radio de trabajo de-(K "etros( e+
co"#acto IRB -K;6ID #&ede "ontarse tanto en e+ s&e+o co"o en #osicin
invertida$ Esta *+e<ibi+idad de co+ocacin o*rece red&cidos tie"#os de cic+o !
&na a"#+ia ga"a de #osibi+idades de #rod&ccin$
E=ceente 'recisin > ?eocidade.
Los robots de ABB son *a"osos #or s& #ti"o contro+ de
tra!ectoria$ Con +a tecno+og2a Tr&eMoveM e+ IRB -K;6ID
o*rece &na e<traordinaria #recisin( con +a tecno+og2a
Q&icNMoveM e+ robot #&ede &ti+i,ar &na ace+eracin ")<i"a
entre so+dad&ras a&"entando +a #rod&ccin ! a+ "is"o
tie"#o red&cir e+ cons&"o de energ2a$
Caracter2sticas de &n robot B-C
REGES
RCA8ACIDAD DE CARFA
R=REA DE TRABAGO
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
RRESOL.CI/N
R8RECISI/N
CARACTER@STICAS DE +N ROBOT SO,DADOR
EJES
Cada &no de +os "ovi"ientos inde#endientes de+ "ani#&+ador
EJE
"
EJE
3
EJE #
EJE
EJE 1
EJE $
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
CA$ACIDAD DE CARGA
Es +a ca#acida de decarga %&e tiene e+ "ani#&+ador en s& "&3eca
RESO,+CION# Mini"o incre"ento %&e #&ede ace#tar +a &nidad de contro+$
$RECISION# Distancia entre e+ #&nto #rogra"ado ! e+ va+or "edio de
+os #&ntos %&e 'a ido a+ re#etir e+ "ovi"ento
$RE$ETIBI,IDAD# Dia"etro de +a es*era %&e inc+&!e +os #&ntos donde 'a
ido
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
)REA DE TRABA*O
Es e+ ,o+-&en a+rededor de+ &an'p-+ador .-e 'n/+-0e todos
+os p-ntos .-e este p-ede ++e1ar%
ROBOT DE SO,DAD+RA ARCO DE A,TA $RECISIN B IRB (4/)IDA
E robot es'ec<"ico 'ara sodadura arco
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
En e+ IRB -K;6ID BIntegrated DressingC( e+ #a%&ete de "ang&eras est)
tota+"ente integrado en e+ bra,o s&#erior ! a trav1s de +a base de+ robot$
Esto signi*ica %&e todos +os "edios necesarios #ara +a so+dad&ra arco(
co"o +a #otencia( e+ 'i+o de so+dad&ra( e+ gas de #roteccin ! e+ aire
co"#ri"ido( est)n orientados #ara conseg&ir +as "ejores #restaciones !
e*iciencia energ1tica$ E+ IRB -K;6ID #ro#orciona &na so+dad&ra estab+e(
e<ce+ente #recisin de tra!ectoria( red&ccin en e+ tie"#o de cic+o ! &na
"a!or d&rabi+idad de+ #a%&ete de "ang&eras$ Fracias a +a con*ig&racin
integrada( #&eden e*ect&arse so+dad&ras en torno a objetos ci+2ndricos
sin ning&na #arada ! con &na "a!or *aci+idad de acceso a es#acios
red&cidos$
Instaacin "e=ibe
Con &na ca#acidad de carga de H Ng ! &n radio de trabajo de-(K "etros( e+
co"#acto IRB -K;6ID #&ede "ontarse tanto en e+ s&e+o co"o en
#osicin invertida$ Esta *+e<ibi+idad de co+ocacin o*rece red&cidos
tie"#os de cic+o ! &na a"#+ia ga"a de #osibi+idades de #rod&ccin$
E=ceente 'recisin > ?eocidad
Los robots de ABB son *a"osos #or s& #ti"o contro+ de tra!ectoria$ Con +a
tecno+og2a Tr&eMoveM e+ IRB -K;6ID o*rece &na e<traordinaria
#recisin( con +a tecno+og2a Q&icNMoveM e+ robot #&ede &ti+i,ar &na
ace+eracin ")<i"a entre so+dad&ras a&"entando +a #rod&ccin ! a+
"is"o tie"#o red&cir e+ cons&"o de energ2a$
5Bci de usarC "Bci de 'roDra%ar
Tanto e+ robot co"o e+ #roceso de so+dad&ra arco se #rogra"an ! se
"antienen *)ci+"ente desde +a &nidad de #rogra"acin >+e<8endant de
ABB$ .na inter*a, gr)*ica e int&itiva %&e #er"ite a +os o#erarios contro+ar
e+ robot ! e+ e%&i#o de so+dad&ra en s& #ro#io idio"a$ E%&i#ado con &na
#anta++a t)cti+ ! con e+ jo!sticN e<c+&sivo de ABB #ara conseg&ir &n
#osiciona"iento r)#ido ! senci++o de+ robot$ Res#ecto a +as ventajas de
+a si"&+acin ! +a #rogra"acin Po**+ineD( ABB o*rece +os #a%&etes de
so*t?are ")s #o#&+ares( *iab+es ! rentab+es( RobotSt&dioM !
RobotSt&dio Arc Se+ding 8o?er-8ac con Tirt&a+ArcM$ Con Tirt&a+ArcM(
&sted dis#one de &na 'erra"ienta %&e +e #er"ite +a correcta
#ara"etri,acin de +os datos de so+dad&ra de &n "odo tota+"ente
virt&a+( evitando errores$ En &nas #ocas 'oras( e+ robot estar)
#rod&ciendo con +os tie"#os de cic+o #revistos ! con &nas so+dad&ras de
a+ta ca+idad$
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
Ser?icio > asistencia %undia
8ara &n *&nciona"iento sin #rob+e"as( ABB o*rece asi"is"o Re"oteService(
%&e #ro#orciona acceso a distancia a+ e%&i#o #ara s& s&#ervisin !
so#orte$ Ade")s( +os c+ientes de ABB #&eden a#rovec'ar +a
organi,acin de servicio de +a e"#resa( %&e con ")s de @K a3os de
e<#eriencia en e+ sector de +a so+dad&ra arco( ABB #ro#orciona so#orte
de servicio en ")s de -66 e"#+a,a"ientos en K@ #a2ses$
ESPECIFICACIONES TECNICAS DEL ROBOT IRB 1$!ID
IRB #2!"ID
Pr'n/'pa+es ap+'/a/'ones Ca&po de tra3a4o
So+dad-ra ar/o IRB #2!"ID567#%2
Espe/'8/a/'9n
Car1a :t'+
6 ;1
Car1a en e+ 3ra<o
#" ;1
Rad'o de tra3a4o
#$2" &
:&ero de e4es
=
Prote//'9n
IP6"
Monta4e
En s-e+o$ 'n,ert'do
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
Var'antes de /ontro+ador IRC2
M9d-+o de a//'ona&'ento ar&ar'o sen/'++o$
Cara/ter>st'/as ?>s'/as
D'&ens'ones de +a 3ase de+ ro3ot
@"" A @"" &&
Peso de+ ro3ot
#B" ;1
Presta/'ones Cse1:n +a nor&a ISO D!E@F
Repet'3'+'dad de +a pos'/'9n CRPF
"$"2 &&
Repet'3'+'dad de+ re/orr'do CRTF
"$@2 &&
Mo,'&'ento
Mo,'&'entos de +os e4es Ca&po de tra3a4o
Ve+o/'dad &GA'&a
E4e # H #B"I a 5#B"I
#@"I7s
E4e ! H #2"I a 5D"I
#6"I7s
E4e @ HE"I a 5#""I
#6"I7s
E4e 6 H #22I a 5#22I
@!"I7s
E4e 2 H #@2I a 5D"I
@E"I7s
E4e = H!""I a 5!""I
6="I7s
J MGA H!EE re,% a55!EE re,%
ConeA'ones e+K/tr'/as
Tens'9n de a+'&enta/'9n
@E" V
Cons-&o
"$= ;W /-3o ISO
Cond'/'ones a&3'enta+es
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
Te&perat-ra a&3'ente para +a -n'dad &e/Gn'/a:
D-rante e+ ?-n/'ona&ento
H2IC C6#IFF a H62IC C##@IFF
D-rante e+ transporte 0 e+ a+&a/ena&'ento 5!2IC
C#@IFF a H22IC C#@#IFF
D-rante per'odos /ortos C&GA'&o !6LF Lasta
HB"I C C#2EI FF
H-&edad re+at',a MGA%D2M
a te&perat-ra /onstante
Se1-r'dad
C'r/-'tos do3+es /on s-per,'s'9n$ paradas
de e&er1en/'a 0 ?-n/'ones de se1-r'dad$ d'spos't',o .-e per&'te @
pos'/'ones%
E&'s'ones Prote//'9n
EMC7EMI
Los datos 0 +as d'&ens'ones p-eden /a&3'arse s'n pre,'o a,'so
ROBOT DE SO,DADOR DE $+NTO
so+dad&ra #or #&ntos Las de"andas de a+ta ve+ocidad de #roceso( #rod&ccin
*iabi+idad ! ca+idad de origen es &n en*o%&e #rinci#a+ en +a ind&stria de+
a&to"vi+$ ABB o*rece +a #isto+a de n&evo servo e+1ctrico( >+e<F&n( con
"ovi"ientos de bra,os #ara+e+os co"o so+&cin integrada contro+ada #or e+ de
contro+ de+ robot$
Desarro++ado ! *abricado #or ABB( e+ >+e<F&n es &n siste"a "od&+ar siste"a$
E+ c&er#o "is"o se #&ede co"binar con +a nor"a o ar"as es#ec2*icas( #or U
o +as ar"as C V G$ Este conce#to o*rece &na a"#+ia ga"a de so+&ciones de
so+dad&ra #ara satis*acer todas +as e<#ectativas de +a ind&stria( con retardos cortos$
E+ "ovi"iento de+ bra,o #ara+e+o "ejora +a rigide, de +os bra,os #ara garanti,ar +a
ca+idad de+ #roceso$ Si"#+e ! rob&sto( e+ >+e<- F&n ta"bi1n es *)ci+ de integrar !
"antener$
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
Bene*icios C+ave
- C&er#o de +a #isto+a Lo "is"o #ara
todos +os "ode+os BF&n U W C V GC
- Dise3ado #ara +a *&er,a de e+ectrodo
#esado
- Menos sensib+e #ara +a so+dad&ra
esc&#i
- Menos #ie,as de re#&esto
- >)ci+ de ca"biar entre U ! C V G F&n
- Dee#er OventanaO
- Centro de gravedad cerca de +a
insercin de+ robot
- 8osibi+idad de CAD va+idacin
o#ciones5
- Ca"biador de 'erra"ientas
- 8isto+a de so#orte de de#sito
- Trans*or"ador ti#o
- Robot so#orte de *ijacin
- E+ectrodo est)ndar
- No ig&a+acin de dis#ositivo
- #roceso rea+i,ado #or e+ robot
Big&a+acin de so*t?areC
- 8isto+a R)#ida #&esta en servicio
! e+ ree"#+a,o
- >)ci+ "anteni"iento
- .nidad de acciona"iento integrado
en e+ contro+ de robot
- Robot de si"&+acin si"#+i*icada
#or +a si"etr2a #isto+a
F%&'G(n X T)*& F%&'G(n C+J T)*&
E%&,-./
0/
-1-(%2.
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
A B C+D E
F
Ro3ot ar/L',os ad4-ntos
A En %2 %3n&2 0& */41,1/n251&n-/ .&6&.4/
B "! 7 P/41,1/n251&n-/
C + D 8! 7 P/41,1/n251&n-/ %20/ 0&% ,/n&,-/.
E 8! 7 %20/ 0&% 5/-/. 0& */41,1/n251&n-/
8! 7 F */41,1/n251&n-/ 19:(1&.02 + 0&.&,;2
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
Robots para pintura d
!triors d "arro"r#as
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
ROBOT 8INTOR @X Feneracin5 IRB-KK66 B>+e<8ainterC
Y +n nue?o conce'to 8ue tiene co%o
ob*eti?o e di?idir 'or dos e n&%ero
de robots 'ara 'intar carrocer<as#
Y Fran )rea de trabajo
Montado sobre #ared de cabina( sin ra2+
7 Ejes
Bajo "anteni"iento
>+e<ibi+idad cine")tica5
8intado de e<teriores
8intado de interiores
A#ert&ra de ca#ot
E Ata aceeracin
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
B24&4 0& %2 &4-.2-&g12 0& ABB &n P1n-(.2
S-2)On
N/P2-,;
H1g; </=
CBsica Sta>On Abanico ?ariabe
La pro1ra&a/'9n a a+ta a/e+era/'9n se ++a&a %%%
S-2)On>
,/n414-& &n (n 5?-/0/ 0& *./g.252,1@n :(&
n/4 *&.51-& 52n-&n&. &% 2-/51920/. &n &4-20/
AONB 0(.2n-& -/0/ &% -1&5*/ &n :(& &% ./C/-
2*%1,2, 0& 52n&.2 :(& 01451n(15/4
&%A/6&.4*.2)B ) &% -1&5*/ 0& ,1,%/.
Sta!OnTM Z Co"o +a ace+eracin a*ecta a+ es#esor
Y Acceeration /4%FsG Acceeration (4%FsG Acceeration 4%FsG
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
Y C>ce ti%e ().7 sec C>ce ti%e ((.( sec C>ce ti%e (/.H sec
La #rogra"acin a con gran a+cance se ++a"a $$$
No$atcIJ
Un C(&n 2%,2n,& ;/.19/n-2% ) 6&.-1,2% &4 ,.(,12%
&4 (n2 ,2.2,-&.34-1,2 0&% ./C/- ) (n 5?-/0/ 0&
*./g.252,1@n :(& &%151n2 A4/%2*&4B &n-.&
,2*24, 1n&61-2C%&4 ,(2n0/ 4& 2*%1,2 ,/n
5D%-1*%&4 ./C/- 0& 2%,2n,& %151-20/.
La co"binacin de +os "1todos No8atc'TM W Sta!OnTM
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
$ROTECCION DE ROBOT CON ,A NOR-ATIKA IEC 7)4/1
De"inicin > Taba de Grado de $roteccin LI$AC acorde a DIN EN IEC
7)4/1
E+ Grado de 'roteccion I$ 'ace re*erencia a+ estandar internaciona+ IEC
76K;E PFrados de #roteccinD &ti+i,ado con "&c'a *rec&encia en +os datos
t1cnicos de e%&i#a"iento e+1ctrico !Vo e+ectrnico Ben genera+ de &so ind&stria+
co"o sensores( "edidores( contro+adores( etcC$ Es#eci*ica &n e*ectivo siste"a
#ara c+asi*icar +os di*erentes grados de #roteccin a#ortados a +os "is"os #or
+os contenedores %&e resg&ardan +os co"#onentes %&e constit&!en e+ e%&i#o$
Este est)ndar 'a sido desarro++ado #ara ca+i*icar de &na "anera a+*a-n&"1rica
a e%&i#a"ientos en *&ncin de+ nive+ de #roteccin %&e s&s "ateria+es
contenedores +e #ro#orcionan contra +a entrada de "ateria+es e<tra3os$
Mediante +a asignacin de di*erentes cdigos n&"1ricos( e+ grado de #roteccin
de+ e%&i#a"iento #&ede ser identi*icado de "anera r)#ida ! con *aci+idad$
De esta "anera( #or eje"#+o( c&ando &n e%&i#a"iento tiene co"o grado de
#roteccin +as sig+as5 IP67$
Las +etras I$ identi*ican a+ est)ndar B&na antig&a 'erencia de +a
ter"ino+og2a Internationa+ 8rotectionC(
E+ va+or 7 en e+ #ri"er d2gito n&"1rico describe e+ nive+ de #roteccin
ante #o+vo( en este caso5 "El polvo no debe entrar bajo ninguna
circunstancia"
E+ va+or H en e+ seg&ndo d2gito n&"1rico describe e+ nive+ de #roteccin
*rente a +2%&idos Bnor"a+"ente ag&aC( en n&estro eje"#+o5 "El objeto debe
resistir (sin filtracin alguna) la inmersin
De*inicin de+ gradoV2ndice de #roteccin acorde a DIN EN IEC76K;E
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
Los nive+es de #roteccin est)n indicados #or &n cdigo co"#&esto #or dos
+etras constantes PI8P ! dos nA"eros %&e indican e+ grado de #roteccin$ 8or
eje"#+o5 I8KH
Eje"#+o5
8roteccin contra e+ ingreso
de c&er#os s+idos$
Cdigo I87K
8roteccin contra +2%&idos$
P.15&.
En01,&F
S&g(n0/
En01,&F
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
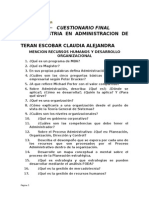
Indican el grado de proteccin de personas contra el acceso a partes peligrosas.
Letra Proteccin contra el acceso a partes peligrosas con:
A Dorso de la mano
B Dedos
C Herramientas
D Alambres
3
TRABAJO ENCARGADO DE ROBOTICA II - CARACTERISTICAS DE BRAZOS
ROBOT DE LAS MARCAS ABB YMOTOMAN
También podría gustarte
- Pasteleria Manual 2 HeladosDocumento12 páginasPasteleria Manual 2 HeladosNico TotoAún no hay calificaciones
- Nashla Rondon - Informe de Practicas - MDPDocumento45 páginasNashla Rondon - Informe de Practicas - MDPNashla RondónAún no hay calificaciones
- La Yugoslavia de TitoDocumento33 páginasLa Yugoslavia de TitoMartin Artola100% (1)
- Comentario de La Constitucion Politica Del PeruDocumento49 páginasComentario de La Constitucion Politica Del PeruFreddy Wuilmer Machaca Calizaya100% (1)
- Seminario de Tesis Ii Seccion B PDFDocumento8 páginasSeminario de Tesis Ii Seccion B PDFFreddy Wuilmer Machaca CalizayaAún no hay calificaciones
- Partes de Un Informe ContabilidadDocumento3 páginasPartes de Un Informe ContabilidadFreddy Wuilmer Machaca CalizayaAún no hay calificaciones
- AdministracionDocumento17 páginasAdministracionFreddy Wuilmer Machaca CalizayaAún no hay calificaciones
- Tecnologos MedicosDocumento23 páginasTecnologos MedicosFreddy Wuilmer Machaca CalizayaAún no hay calificaciones
- Banca y SegurosDocumento80 páginasBanca y SegurosFreddy Wuilmer Machaca CalizayaAún no hay calificaciones
- Tablas de ContabilidadDocumento4 páginasTablas de ContabilidadFreddy Wuilmer Machaca CalizayaAún no hay calificaciones
- Expo de ProfibusDocumento35 páginasExpo de ProfibusFreddy Wuilmer Machaca CalizayaAún no hay calificaciones
- Historia de La EconomíaDocumento2 páginasHistoria de La EconomíaDaniel Andres Perez CifuentesAún no hay calificaciones
- Auditoria Iii Propiedad, Planta y Equipos 3 PDFDocumento3 páginasAuditoria Iii Propiedad, Planta y Equipos 3 PDFfrancis cruzAún no hay calificaciones
- San Juan Del CesarDocumento6 páginasSan Juan Del CesarMi Rincon de poesiaAún no hay calificaciones
- IkigaiDocumento15 páginasIkigaiRafael SifontesAún no hay calificaciones
- Las Escrituras Inspiradas, Regla de Fe y Parctica.Documento23 páginasLas Escrituras Inspiradas, Regla de Fe y Parctica.Bautista SiloeAún no hay calificaciones
- APU UbsDocumento95 páginasAPU UbsJuan Manuel RodriguezAún no hay calificaciones
- Estudio de Vulnerabilidad Edificación Colegio de Salerno Sede BachilleratoDocumento361 páginasEstudio de Vulnerabilidad Edificación Colegio de Salerno Sede BachilleratoWalter AndradeAún no hay calificaciones
- Catalogo Estructura y Albañilerias CONSTRUCTRA AVIÑONDocumento4 páginasCatalogo Estructura y Albañilerias CONSTRUCTRA AVIÑONArgenis AlfaroAún no hay calificaciones
- Trabajo Del Curso de Introducción Al Bachillerato UnificadoDocumento28 páginasTrabajo Del Curso de Introducción Al Bachillerato UnificadoLuzuriaga Cueva JFAún no hay calificaciones
- 7092-Taller de Repaso Final N°3-Organismo y Ambiente 2023Documento13 páginas7092-Taller de Repaso Final N°3-Organismo y Ambiente 2023Sebastian RainAún no hay calificaciones
- ExamenDocumento4 páginasExamenCarlos Martinez GutierrezAún no hay calificaciones
- Hecho PunibleDocumento10 páginasHecho PunibleIris HilariAún no hay calificaciones
- Transacción Extrajudicial Der Daños Materiales 2019Documento2 páginasTransacción Extrajudicial Der Daños Materiales 2019Juan Alberto Martinez MirandaAún no hay calificaciones
- Procedimiento General Visitas CampoDocumento9 páginasProcedimiento General Visitas CampoJUAN JOSE PAEZAún no hay calificaciones
- Falsedad Material y Falsedad IdeologicaDocumento17 páginasFalsedad Material y Falsedad IdeologicaWilliam Gerardo Vargas LaqueAún no hay calificaciones
- Cuestionario Final MbaDocumento8 páginasCuestionario Final MbaClaudia TeránAún no hay calificaciones
- Instructivo OVIDocumento4 páginasInstructivo OVIadministrador belalcazarAún no hay calificaciones
- Taller Catedra UniversitariaDocumento4 páginasTaller Catedra UniversitariaJuanma Adaime OtalvaroAún no hay calificaciones
- Informe "Digestibilidad en Organismos de Interés Acuícola"Documento12 páginasInforme "Digestibilidad en Organismos de Interés Acuícola"Estebin paternina velasquezAún no hay calificaciones
- Glosario de Terminos - PeluqueriaDocumento12 páginasGlosario de Terminos - Peluqueriaroimer100% (1)
- Guión ChanelDocumento4 páginasGuión ChanelJoselyn mirandaAún no hay calificaciones
- Salmo 45 y Mateo 26-13Documento2 páginasSalmo 45 y Mateo 26-13ov tAún no hay calificaciones
- A Vanse de Anamnesis-1Documento3 páginasA Vanse de Anamnesis-1Jser Misael CsarAún no hay calificaciones
- Examen de ContabilidadDocumento2 páginasExamen de ContabilidadMARINA BAUTISTAAún no hay calificaciones
- Presupuesto InfraestructuraDocumento19 páginasPresupuesto InfraestructuraWILBER PALACIOS MEDINAAún no hay calificaciones
- Captura de Pantalla 2022-09-01 A La(s) 9.03.09 A. M PDFDocumento2 páginasCaptura de Pantalla 2022-09-01 A La(s) 9.03.09 A. M PDFPIERO GONZALO MUÑIZ HUAMANAún no hay calificaciones
- NIDA (2018) : El Uso Indebido de Drogas y La Adicción.Documento6 páginasNIDA (2018) : El Uso Indebido de Drogas y La Adicción.akme73Aún no hay calificaciones