Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Mecanica Clasica
Mecanica Clasica
Cargado por
joybermedinaTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Mecanica Clasica
Mecanica Clasica
Cargado por
joybermedinaCopyright:
Formatos disponibles
a
r
X
i
v
:
p
h
y
s
i
c
s
/
9
9
0
6
0
6
6
v
2
[
p
h
y
s
i
c
s
.
e
d
-
p
h
]
4
J
u
l
1
9
9
9
Los Alamos Electronic Archives: physics/9906066
IFUG
La verdad os hara libres
CURSO: MEC
ANICA CL
ASICA
EDITOR: HARET C. ROSU
rosu@ifug3.ugto.mx
a
d
d
p
t
( ) r
a
p
V
curso de maestra
(graduate course)
Copyright c _ 1999 H.C. Rosu
Leon, Guanajuato, Mexico
v1: Junio de 1999.
1
INDICE DE CONTENIDO
1. LOS PRINCIPIOS DE MINIMO ... 3.
2. MOVIMIENTO BAJO FUERZAS CENTRALES ... 20.
3. CUERPO RIGIDO ... 34.
4. OSCILACIONES PEQUE
NAS ... 55.
5. TRANSFORMACIONES CANONICAS ... 73.
6. PARENTESIS DE POISSON ... 83.
7. LAS ECUACIONES DE HAMILTON-JACOBI ... 86.
8. VARIABLES ACCION-ANGULO ... 94.
9. TEORIA CANONICA DE PERTURBACIONES ... 101.
10. INVARIANTES ADIABATICOS ... 116.
11. MECANICA DE SISTEMAS CONTINUOS ... 120.
Estudiantes colaboradores:
Eri Mena (1)
Julio L opez (2,3)
Alberto Juarez (4)
Mario Ranfer Gutierrez (5-8)
Zaida Urrutia (9,10)
Monica Beltran (11)
Gran parte de la responsabilidad del idioma pertenece a los estudiantes.
2
1. LOS PRINCIPIOS DE MINIMO
Prologo: La historia de los principios de mnimo en la fsica es larga
e interesante. La investigaci on de tales principios se argumenta sobre la
idea de que la Naturaleza act ua siempre de tal forma que determinadas
cantidades de importancia resultan ser siempre minimizadas cuando tiene
lugar un proceso fsico. La base matematica de estos principios es el calculo
variacional.
CONTENIDO:
1. Introducci on
2. Principio de mnima accion
3. Principio de DAlembert
4. Espacio fasico
5. Espacio de conguraciones
6. Ligaduras
7. Ecuaciones de movimiento de Hamilton
8. Leyes de conservacion
9. Aplicaciones del principio de accion
3
1. Introducci on
La experiencia ha demostrado que, cuando sea posible despreciar los efec-
tos relativistas, el movimiento de una partcula dentro de un sistema de
referencia inercial queda correctamente descrito mediante la ecuaci on de
Newton
F = d p/dt. Cuando suceda que la partcula no haya de ejecutar
un movimiento complicado y se utilicen coordenadas rectangulares para de-
scribirlo, generalmente las ecuaciones de movimiento seran relativamente
sencillas; ahora bien si no se verica ninguna de estas condiciones, las ecua-
ciones pueden hacerse bastante complicadas y difciles de manejar.
Cuando una partcula est a limitada a moverse sobre una supercie dada,
deben existir ciertas fuerzas (llamadas fuerzas de ligadura) que mantengan
a la partcula en contacto con dicha supercie. Con el n de facilitar al-
gunos problemas de ndole pr actico que aparecen al aplicar las formulas
de Newton a ciertos problemas, pueden desarrollarse otros procedimientos.
Esencialmente, todos estos procedimientos de abordar los problemas son a
posteriori, puesto que sabemos de antemano que hemos de obtener resul-
tados equivalentes a las formulas de Newton. Entonces, no es necesario
formular una nueva teora de la mec anica la teora de Newton es sucien-
temente correcta- para efectuar una simplicacion, sino que basta con idear
otro metodo que nos permita abordar problemas complicados de forma gen-
eral. El principio de Hamilton contiene un metodo de este car acter y las
ecuaciones de movimiento que resultan de la aplicaci on del mismo se llaman
ecuaciones de Lagrange.
Si las ecuaciones de Lagrange han de constituir una descripcion adecuada
de la din amica de las partculas, deber an ser equivalentes a las ecuaciones
que resulten de las formulas de Newton. Por otra parte, el principio de
Hamilton es de aplicaci on a una amplia gama de fenomenos fsicos (en es-
pecial los relativos a campos) con los que generalmente no se relacionan las
ecs. de Newton. Es seguro que cada una de las consecuencias que pueden
extraerse del principio de Hamilton fue deducida primero, al igual que las
ecs. de Newton, relacionando entre s hechos experimentales. El princi-
pio de Hamilton no nos proporciona teora fsica nueva alguna, pero nos ha
permitido unicar satisfactoriamente muchas teoras separadas, partiendo
de un postulado fundamental sencillo. Ello no constituye un ejercicio de
habilidad, puesto que el objetivo de la fsica no es unicamente dar una for-
mulaci on matem atica precisa para los fenomenos observados, sino tambien
describir sus efectos con ahorro de postulados fundamentales y de la manera
m as unicada posible.
4
El primero de los principios de mnimo se desarrollo en el campo de la optica
por Heron de Alejandra hace casi dos mil a nos. Encontr o que la ley que rige
la reexion de la luz puede obtenerse admitiendo que un rayo luminoso, que
viaje de un punto a otro reejandose en un espejo plano, recorre siempre el
camino m as corto. No obstante, el principio del camino m as corto de Heron
no puede proporcionar una expresi on correcta de la ley de la refraccion. En
1657, Fermat formul o nuevamente el principio postulando que los rayos lu-
minosos viajan siempre de un punto a otro de un medio siguiendo el camino
que requiera el menor tiempo. Este principio del tiempo mnimo de Fer-
mat conduce inmediatamente, no s olo a la ley correcta de la reexion, sino
tambien a la ley de la refraccion de Snell.
Los estudios acerca de los principios de mnimo continuaron y, en la ultima
parte del siglo XVII, Newton, Leibniz y los hermanos Bernoulli iniciaron el
desarrollo del calculo variacional. En a nos posteriores este principio recibi o
de Lagrange una base matem atica s olida (1760). En 1828, Gauss desarrollo
un metodo para estudiar la mec anica mediante su principio de ligadura
mnima. En sendos trabajos, publicados en 1834 y 1835, Hamilton expuso
el principio din amico de la mnima accion sobre el cu al es posible formular
toda la mec anica y a decir verdad, la mayor parte de la fsica.
Accion es una magnitud de dimensiones longitud por mpetu o bien energa
por tiempo.
2. Principio de mnima acci on
La formulaci on m as general de la ley del movimiento de los sistemas mec anicos
es el principio de mnima acci on (o de Hamilton). Seg un este principio, todo
sistema mec anico est a caracterizado por una funcion denida:
L
_
q
1
, q
2
, ..., q
s
,
q
1
,
q
2
,
q
s
, t
_
,
o m as brevemente L
_
q,
q
, t
_
, y el movimiento del sistema satisface la sigu-
iente condici on: Supongamos que en los instantes t = t
1
y t = t
2
el sistema
ocupa posiciones dadas, caracterizadas por los dos conjuntos de valores de
las coordenadas q
(1)
y q
(2)
; el sistema se mueve entre estas posiciones de
manera que la integral
S =
_
t
2
t
1
L
_
q,
q
, t
_
dt (1)
tome el menor valor posible. La funcion L se llama Lagrangiana del sistema,
y la integral (1) la acci on. La funcion de Lagrange no contiene m as que q
5
y
q
, y no las derivadas superiores, eso es debido al hecho que el estado
mec anico de un sistema est a completamente denido por sus coordenadas y
sus velocidades.
Establezcamos ahora las ecuaciones diferenciales que determinan el mnimo
de la integral (1). Por simplicidad empecemos suponiendo que el sistema no
tiene m as que un s olo grado de libertad, de manera que hace falta determinar
una sola funcion q (t). Sea precisamente q = q (t) la funcion para la cual S
es un mnimo. Esto signica que S crece cuando se sustituye q (t) por una
funcion cualquiera
q (t) +q (t) , (2)
donde q (t) es una funcion que es peque na en todo el intervalo de t
1
a t
2
[se
le llama variaci on de la funcion q (t)]. Puesto que para t = t
1
y t = t
2
todas
las funciones (2) deben tomar los mismos valores q
(1)
y q
(2)
, se tiene:
q (t
1
) = q (t
2
) = 0. (3)
Lo que vara S cuando se reemplaza q por q +q est a dado por:
_
t
2
t
1
L
_
q +q,
q
+
q
, t
_
dt
_
t
2
t
1
L
_
q,
q
, t
_
dt.
El desarrollo en serie de esta diferencia en potencias de q y
q
comienza
por terminos de primer orden. La condici on necesaria de mnimo (en general
extremal) de S es que el conjunto de estos terminos se anule; As el principio
de mnima accion puede escribirse:
S =
_
t
2
t
1
L
_
q,
q
, t
_
dt = 0, (4)
o, efectuando la variaci on:
_
t
1
t
2
_
L
q
q +
L
q
_
dt = 0 .
Teniendo en cuenta que
q
= d/dt (q), integramos el sugundo termino por
partes y se obtiene:
S =
_
L
q
q
_
t
2
t
1
+
_
t
1
t
2
_
L
q
d
dt
L
q
_
qdt = 0 . (5)
6
En virtud de las condiciones (3), el primer termino de esta expresi on desa-
parece. Queda una integral, la cual debe anularse para todo valor de q.
Esto es solamente posible si el integrando es identicamente nulo, y conse-
cuentemente se obtiene la ecuaci on:
L
q
d
dt
L
q
= 0 .
Si hay varios grados de libertad, las s funciones diferentes q
i
(t) deben variar
independientemente. Es evidente que entonces obtenemos s ecuaciones de
la forma:
d
dt
_
L
q
i
_
L
q
i
= 0 (i = 1, 2, ..., s) (6)
Estas son las ecuaciones diferenciales buscadas; en Mecanica se les llama
ecuaciones de Lagrange. Si se conoce la lagrangiana de un sistema mec anico
dado, entonces las ecuaciones (6) establecen la relacion entre las acelera-
ciones, las velocidades y las coordenadas, es decir, son las ecuaciones del
movimiento del sistema. Desde un punto de vista matem atico, las ecua-
ciones (6) forman un sistema de s ecuaciones diferenciales de segundo orden
con s funciones desconocidas q
i
(t). La soluci on general del sistema contiene
2s constantes arbitrarias. Para determinarlas y, por lo tanto, para denir
completamente el movimiento del sistema mec anico, es necesario conocer las
condiciones iniciales que caractericen el estado del sistema en un instante
dado, por ejemplo los valores iniciales de las coordenadas y de las veloci-
dades.
3. Principio de DAlembert
Desplazamiento virtual (innitesimal) de un sistema es el cambio de con-
guracion de este a consecuencia de una variaci on innitesiamal arbitraria
de las coordenadas r
i
,compatible con las fuerzas y ligaduras impuestas al
sistema en el instante dado t. Se llama virtual al desplazamiento para dis-
tinguirlo del desplazamiento real del sistema que tiene lugar en un intervalo
de tiempo dt, durante el cual puede variar las fuerzas y ligaduras.
Las ligaduras (o restricciones) introducen 2 tipos de dicultades en la soluci on
de problemas mec anicos:
(1) No todas las coordenadas son independientes.
(2) Las fuerzas de ligadura por lo general no se conocen a priori, son parte
de las inc ognitas del problema y han de obtenerse a partir de la soluci on
buscada.
7
En el caso de ligaduras holon omicas la dicultad (1) se salva introduciendo
coordenadas independientes (q
1,
q
2,...,
q
m
, donde m es el numero de grados
de libertad). Esto es, si hay m ecuaciones de ligadura y 3N coordenadas
(x
1
, ..., x
3N
), podemos eliminar esas n ecs. introduciendo las variables inde-
pendientes (q
1
, q
2
, .., , q
n
) mediante una transformacion de la forma
x
1
= f
1
(q
1
, ..., q
m
, t)
.
.
.
x
3N
= f
3N
(q
1
, ..., q
n
, t) ,
donde n = 3N m.
Para librarnos del problema (2) necesitamos formular la mec anica de modo
que las fuerzas de ligadura NO APAREZCAN en la soluci on de problemas.
Esta labor constituye la esencia de lo que llamaremos El Principio de Tra-
bajos Virtuales.
Trabajo Virtual: Supongamos que un sistema de N partculas se describe
por 3N coordenadas (x
1
, x
2
, ..., x
3N
) y sean F
1,
F
2,...,
F
3N
las componentes
de las fuerzas que act uan sobre cada uno. Si las partculas del sistema ex-
perimentan desplazamientos innitesimales e instantaneos x
1
, x
2
, ..., x
3N
debido a dichas fuerzas, entonces el trabajo realizado es:
W =
3N
j=1
F
j
x
j
. (7)
Dichos desplazamientos se llaman desplazamientos virtuales y W se llama
trabajo virtual; (7) tambien puede escribirse como:
W =
N
=1
F
r . (8)
Fuerzas de ligadura o de restricci on: adem as las fuerzas externas F
(e)
las partculas pueden estar sujetas a fuerzas de ligadura F
.
Principio de trabajo virtual: Sea F
la fuerza que act ua sobre la -
esima partcula, si separamos F
en la contribucion de origen externo F
(e)
y la ligadura R
= F
(e)
+R
. (9)
8
Si el sistema est a en equilibrio entonces
F
= F
(e)
+R
= 0 . (10)
As que el trabajo virtual debido a todas las posibles fuerzas F
es:
W =
N
=1
F
=
N
=1
_
F
(e)
+R
_
r
= 0 . (11)
Si el sistema es tal que sus fuerzas de ligadura no producen trabajo virtual
entonces de (11) concluimos que:
N
=1
F
(e)
= 0 . (12)
Ya hechan las deniciones anteriores podemos llegar a lo que es el principio
de DAlembert. La ecuaci on del movimiento es seg un Newton:
F
y puede escribirse de la forma
F
= 0 ,
que dice que las partculas del sistema estar an en equilibrio bajo una fuerza
igual a la real m as una fuerza invertida
p
i
. En vez de (12) podemos
escribir inmediatamente
N
=1
_
F
_
r
= 0 (13)
y haciendo la misma descomposici on en fuerzas aplicadas y fuerzas de lig-
adura (f
), resulta:
N
=1
_
F
(e)
_
r
+
N
=1
f
= 0 .
Limitemonos de nuevo a sistemas para los cuales el trabajo virtual de las
fuerzas de ligadura sea nulo y obtendremos
N
=1
_
F
(e)
_
r
= 0 , (14)
9
que constituye el principio de DAlembert. Ahora esta ecuaci on anterior
a un no tiene forma util para proporcionar las ecuaciones de movimiento del
sistema, por lo que debemos transfomar el principio en una expresi on que
contenga desplazamientos virtuales de las coordenadas generalizadas, las
cuales son entonces independientes entre si esto implica que se podran hacer
cero los coecientes de q
y la velocidad en termino de las coordenadas
generalizadas es:
v
=
dr
dt
=
k
r
q
k
q
k
+
r
t
donde r
= r
(q
1
, q
2
, ..., q
n
, t) .
Analogamente, el desplazamiento virtual arbitrario r
se puede relacionar
con los desplazamientos virtuales q
j
mediante
r
j
r
q
j
q
j
.
Entonces en funcion de las coordenadas generalizadas, el trabajo virtual de
las F
ser a:
N
=1
F
j,
F
q
j
q
j
=
j
Q
j
q
j
, (15)
donde las Q
j
son las llamadas componentes de la fuerza generalizada, las
cuales se denen en la forma
Q
j
=
q
j
.
Ahora si vemos a la ec. (14) como:
p
r
(16)
y sustituyendo en esta ultima ec. los resultados anteriores podemos ver que
(16):
_
d
dt
_
m
q
j
_
m
q
j
_
=
j
__
d
dt
_
T
q
j
_
T
q
j
_
Q
j
_
q
j
= 0 .
(17)
10
Las variables q
j
pueden ser un sistema cualquiera de coordenadas para de-
scribir el movimiento del sistema. Sin embargo, si las ligaduras son holono-
mas, ser a posible encontrar sistemas de coordenadas q
j
independientes que
contengan implcitamente las condiciones de ligadura en las ecuaciones de
transformacion x
i
= f
i
es que se anulen por separado los coecientes:
d
dt
_
T
q
_
T
q
= Q
j
. (18)
En total hay m ecuaciones. Las ecuaciones (18) suelen llam arseles ecuaciones
de Lagrange, si bien esta designacion se reserva frecuentemente para la forma
que toman estas ecuaciones, cuando las fuerzas se derivan de un potencial
escalar V
F
=
i
V.
Entonces Q
j
puede escribirse como:
Q
j
=
V
q
j
.
Las ecuaciones (18) pueden escribirse tambien en la forma:
d
dt
_
T
q
j
_
(T V )
q
j
= 0 (19)
y deniendo la funcion Lagrangiana L, en la forma L = T V se obtiene
d
dt
_
L
q
j
_
L
q
j
= 0 . (20)
Estas son las Ecuaciones de Lagrange.
4. - Espacio Fasico
En la interpretacion geometrica de los fenomenos mec anicos se hace fre-
cuentemente uso del concepto de espacio f asico, es un espacio de 2s di-
mensiones cuyos ejes coordenados corresponden a los s coordenadas gener-
alizadas y a los s mpetus del sistema mec anico considerado. Cada punto
en este espacio corresponde a un estado denido del sistema. Cuando el
sistema se mueve, el punto representativo en el espacio fasico describe una
lnea denominada trayectoria f asica.
11
5. - Espacio de Conguraciones
El estado de un sistema compuesto de n partculas y sometido a m ligaduras
que relacionen entre s a algunas de las 3n coordenadas rectangulares queda
especicado por completo mediante s = 3n m coordenadas generalizadas.
Es posible, pues, representar el estado de tal sistema por un punto de un
espacio de s dimensiones que llamamos espacio de conguraciones, corre-
spondiendo cada una de las diemensiones de este espacio a una de las q
j
. La
historia, o evoluci on a traves del tiempo, del sistema, estar a representada
por una curva del espacio de confuguraciones, cada uno de cuyos puntos
represaentar a la conguracion del sistema en un instante determinado.
6. - Ligaduras
Es necesario tener en cuenta las ligaduras que limitan el movimiento del
sistema. Las ligaduras pueden clasicarse de divesas maneras. En el caso
general en que la ecuaciones de ligadura puedan expresarse como:
i
c
i
q
i
= 0 ,
donde las c
i
son funciones de las coordenadas solamente (el ndice numera
las ecuaciones de ligadura). Si los primeros miembros de estas ecuaciones
no son derivadas totales con respecto al tiempo de funciones de las coor-
denadas, estas ecuaciones no pueden ser integradas. En otras palabras, no
pueden reducirse a relaciones entre las coordenadas solamente, que podran
utilizarse para expresar la posici on e los cuerpos por un n umero menor de
coordenadas, correspondiente al n umero real de grados de libertad. Tales
ligaduras se llaman no holon omicas (en oposici on a las ligaduras anteriores
son las llamadas holon omicas que relacionan solamente las coordenadas del
sistema).
7. Ecuaciones de movimiento de Hamilton
La formulaci on de las leyes de la Mecanica con la ayuda de la Lagrangiana,
presupone que el estado mec anico del sistema est a determinado dando sus
coordenadas y velocidades generalizadas. Sin embargo, este no es el unico
metodo posible; la descripcion del estado de un sistema en funcion de sus
coordenadas e mpetus generalizados presenta un cierto n umero de ventajas.
El paso de un conjuto de variables independientes a otro puede realizarse
mediante lo que se llama en matem aticas tranformaci on de Legendre. En
este caso la transformacion toma la siguinte forma, donde la diferencial total
de la Lagrangiana como funcion de las coordenadas y de las velocidades es:
dL =
i
L
q
i
dq
i
+
i
L
q
i
d
q
i
,
12
la cual puede escribirse como:
dL =
p
i
dq
i
+
i
p
i
d
q
i
, (21)
donde ya sabemos que las derivadas L/
q
i
, son por denicion, los mpetus
generalizados y L / q
i
=
p
i
por las ecuaciones de Lagrange. El segundo
termino de la ec. (21) puede escribirse en la forma
i
p
i
d
q
i
= d
_
p
i
q
i
_
q
i
dq
i
.
Llevando la diferencial total d
_
p
i
q
i
_
al primer miembro, y cambiando
los signos, se obtiene de (21):
d
_
p
i
q
i
L
_
=
p
i
dq
i
+
p
i
q
i
. (22)
La cantidad bajo el signo de la diferencial es la energa del sistema expre-
sada en funcion de las coordenadas y de los mpetus y se llama funci on de
Hamilton o Hamiltoniana del sistema:
H (p, q, t) =
i
p
i
q
i
L . (23)
Entonces de la ec. (22)
dH =
p
i
dq
i
+
p
i
q
i
en lo cual las variables independientes son las coordenadas y los mpetus, se
obtienen las ecuaciones
q
i
=
H
p
i
p
i
=
H
q
i
. (24)
Estas son las ecuaciones de movimiento en las variables q y p y se llaman
ecuaciones de Hamilton.
8. Leyes de conservaci on
8.1 Energa
Consideremos primero el teorema de conservacion que resulta de la homo-
geneidad del tiempo. En virtud de esta homogeneidad, la Lagrangiana de un
sistema cerrado no depende explcitamente del tiempo. Entonces la derivada
13
total respecto al tiempo de la Lagrangiana (no dependiente explcitamente
del tiempo) puede escribirse como:
dL
dt
=
i
L
q
i
q
i
+
i
L
q
i
q
i
y de acuerdo a las ecs. de Lagrange podemos reescribir la ec. anterior como:
dL
dt
=
q
i
d
dt
_
L
q
i
_
+
i
L
q
i
q
i
=
i
d
dt
_
q
i
L
q
i
_
,
o
i
d
dt
_
q
i
L
q
i
L
_
= 0 .
De donde se deduce que la magnitud
E
q
i
L
q
i
L (25)
permanece constante durante el movimiento de un sistema cerrado, es decir
es una integral del movimiento. A esta magnitud se le llama energa E del
sistema.
8.2 Impetu
De la homogeneidad del espacio se deduce otro teorema de conservacion.
En virtud de dicha homogeneidad, las propiedades mec anicas de un sistema
cerrado no varan por un desplazamiento paralelo de todo el sistema en el es-
pacio. Consideremos un desplazamiento innitesimal (i.e., los vectores de
posici on r
se convierten en r
a
+) y busquemos la condici on para que la la-
grangiana no vare. La variaci on de la funcion L, consecuencia de un cambio
innitesimal en las coordenadas (permaneciendo constantes las velocidades
de las partculas), est a dado por:
L =
a
L
r
a
r
a
=
a
L
r
a
,
extendiendo la suma a todas las partculas del sistema. Como es arbitrario,
la condici on L = 0 es equivalente a
a
L
r
a
= 0 (26)
14
y en virtud de las ecs. de Lagrange ya mencionadas
a
d
dt
_
L
v
a
_
=
d
dt
a
L
v
a
= 0 .
Llegamos as a la conclusion de que en un sistema mec anico cerrado, la
magnitud vectorial (llamada mpetu)
P
a
L
v
a
permanece constante durante el movimiento.
8.3 Momento angular o cinetico
Estudiemos ahora el teorema de conservacion que inere de la isotropa del
espacio. Consideremos una rotaci on innitesimal del sistema, y busquemos
la condici on para que la Lagrangiana no vare.
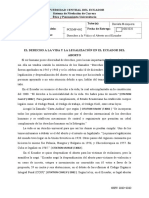
Llamaremos vector de rotaci on innitesimal al vector cuyo m odulo es
igual al angulo de rotaci on y cuya direcci on coincide con el eje de rotaci on.
Consideremos primero el incremento en el vector de posici on correspondiente
a una partcula del sistema, tomando un origen de coordenadas situado en
el eje de rotaci on. El desplazamiento lineal extremo del vector de posici on
en funcion de angulo es
[r[ = r sin ,
(ver g.). La direcci on del vector r es perpendicular al plano denido por
r y , y por tanto,
r = r . (27)
r
r
O
15
La rotaci on del sistema no solamente modica la direcci on de los vectores
de posici on sino tambien las velocidades de las partculas, transformandose
en todos los vectores seg un la misma ley. El incremento de velocidad con
respecto a un sistema jo de coordenadas ser a;
v = v .
Llevemos estas expresiones a la condici on de que la Lagrangiana no vara
por la rotaci on:
L =
a
_
L
r
a
r
a
+
L
v
a
v
a
_
= 0
y sustituyendo, por denicion las derivadas L/v
a
por p
a
y las derivadas
L/r
a
de acuerdo con las ecs. de Lagrange, por
p
a
; obtenemos
a
_
p
a
r
a
+p
a
v
a
_
= 0 ,
o permutando circularmente los factores y sacando fuera del signo suma:
a
_
r
a
p
a
+v
a
p
a
_
=
d
dt
a
r
a
p
a
= 0 ,
puesto que es arbitrario, resulta
d
dt
a
r
a
p
a
= 0
y se concluye que en el movimiento de un sistema cerrado se conserva la
magnitud vectorial (llamada momento angular o momento cinetico)
M
a
r
a
p
a
.
9.- Aplicaciones del principio de Accion
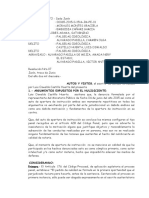
a) Ecuaciones de movimiento
Hallar las ecuaciones del movimiento para una masa pendular suspendida
de un resorte, por aplicaci on directa del principio de Hamilton
16
k
g
m
Para el pendulo de la gura la Lagrangiana es de la forma
L =
1
2
m(
r
2
+r
2
2
) +mgr cos
1
2
k(r r
o
)
2
,
por lo tanto
_
t
2
t
1
Ldt =
_
t
2
t
1
_
m
_
r
r +r
2
+r
2
_
+mgr cos mgr sin k(r r
o
)r
_
dt
m
r
r dt = m
r d(r) = d
_
m
r r
_
mr
r dt .
Igualmente
mr
2
dt = d
_
mr
2
d
_
mr
2
_
dt
dt
= d
_
mr
2
_
mr
2
+2mr
r
_
dt .
Por tanto la integral anterior se escribe como
17
_
t
2
t
1
__
m
r mr
2
mg cos +k (r r
o
)
_
+
_
mr
2
+2mr
r
+mgr sin
_
_
dt
_
t
2
t
1
_
d
_
m
r r
_
+d
_
mr
2
__
= 0 .
Suponiendo que r y son ambas iguales a cero en t
1
y t
2
la segunda integral
es evidentemente nula. Como r y son completamente independientes, la
primera integral puede ser cero solamente si
m
r mr
2
mg cos +k(r r
o
) = 0
y
mr
2
+2mr
r
+mgr sin = 0 ,
pero estas son las ecuaciones de movimiento del sistema.
b) Ejemplo de calculo de minimo
Se trata de demostrar que la lnea m as corta entre dos puntos cualesquiera
p
1
y C sobre un cilindro es una helice.
La longitud S de una lnea cualquiera sobre un cilindro entre p
1
y p
2
est a
dada por
S =
_
p
2
p
1
_
1 +r
2
_
d
dz
_
2
_
1/2
dz ,
donde r, y z son las coordenadas cilndricas usuales con r = cte. Puede
determinarse una relaci on entre y z que le de a esta integral un valor
extremo, por medio de
d
dz
_
= 0 ,
donde =
_
1 +r
2
1/2
y
=
d
dz
, pero como / = 0,
=
_
1 +r
2
2
_
1/2
r
2
= c
1
= cte. ,
por esto r
= c
2
. Y as, r = c
2
z + c
3
que es la ecuaci on de una helice.
Supongamos que en p
1
se tiene = 0 y z = 0, entonces c
3
= 0. En p
2
,
h agase =
2
y z = z
2
por tanto c
2
= r
2
/z
2
, y r = (r
2
/z
2
) z es la
ecuaci on nal.
18
Bibliograa
L. D. Landau y E. M Lifshitz, Mec anica, Fsica Teorica, vol I, editorial
Reverte, S.A. (1969)
H. Goldstein, Mec anica Cl asica, editorial Reverte, S.A. (1992)
19
2. MOVIMIENTO BAJO FUERZAS CENTRALES
Prologo: Por motivos astronomicos este fue el movimiento m as estudiado
del punto de vista experimental en los primeros dos siglos de fsica moderna
y representa un ejemplo principal para cualquier tipo de formalismo matem-
atico. En su variante relativista, el problema de Kepler sigue siendo de gran
interes.
CONTENIDO:
2.1 Problema de dos cuerpos: reduccion al problema de un cuerpo.
2.2 Ecuaciones de movimiento.
2.3 Ecuacion diferencial de la orbita.
2.4 Problema de Kepler.
2.5 Dispersion por un centro de fuerzas (con ejemplo).
20
2.1 Problema de 2 cuerpos: Reduccion al problema de un cuerpo.
Consideremos un sistema mon ogeno de dos puntos materiales de masas m
1
y
m
2
, en el cual las unicas fuerzas son las debidas a un potencial de interaccion
V . Supondremos que V es funcion de cualquier vector entre m
1
y m
2
,
r
2
r
1
, o de sus velocidades relativas
r
2
r
1
, o de derivadas superiores de
r
2
r
1
. Este sistema tiene 6 grados de libertad y por lo tanto 6 coordenadas
generalizadas independientes.
Consideremos que estas son las coordenadas del vector de posici on del centro
de masa, R, mas las tres componentes del vector diferencia r = r
2
r
1
. La
Lagrangiana del sistema tendra entonces la forma:
L = T(
R, r) V (r, r, r, .....). (1)
La energa cinetica T es la suma de la energa cinetica del movimiento del
centro de masa mas la energa cinetica del movimiento en torno al centro de
masa, T:
T =
1
2
(m
1
+m
2
)
R
2
+T,
siendo
T=
1
2
m
1
r
2
1
+
1
2
m
2
r
2
2
.
Aqu r
1
y r
2
son los vectores de posici on de las dos partculas relativas al
centro de masa y estan relacionadas con r a travez de
r
1
=
m
2
m
1
+m
2
r, r
2
=
m
1
m
1
+m
2
r , (2)
entonces Ttoma la forma
T=
1
2
m
1
m
2
m
1
+m
2
r
2
y la Lagrangiana total dada por la ecuaci on (1) es:
L =
1
2
(m
1
+m
2
)
R
2
+
1
2
m
1
m
2
m
1
+m
2
r
2
V (r, r, r, .....) , (3)
de donde denimos la masa reducida como
=
m
1
m
2
m
1
+m
2
o
1
=
1
m
1
+
1
m
2
.
Entonces nuestra ecuacion (3) se puede escribir como
L =
1
2
(m
1
+m
2
)
R
2
+
1
2
r
2
V (r, r, r, .....).
21
De esta ecuaci on vemos que las coordenadas de
R son cclicas por lo que el
centro de masa estara jo o se movera uniformemente.
Ahora, ninguna de las ecuaciones de movimiento para r contendra terminos
donde aparesca R o
R, este termino de la ecuaci on es exactamente lo que
tendriamos si tuvieramos un centro de fuerzas jo (en el centro de masa)
con una partcula a una distancia r de el con masa (masa reducida).
As pues, el movimiento de dos cuerpos en torno a su centro de masa debido
a una fuerza central se puede reducir siempre a un problema equivalente de
un cuerpo.
2.2 Ecuaciones de movimiento.
Ahora nos limitaremos a fuerzas centrales conservativas, en donde el po-
tencial es funcion solo de r, V (r), por lo que la fuerza solo estara dirijida
a lo largo de r. Ya vimos que para resolver el problema solo necesitamos
considerar el problema de una partcula de masa m que se mueva en torno
a un centro de fuerzas jo, el cual sera el origen del sistema de coordenadas.
Como el potencial solo depende de r, el problema tiene simetra esferica,
es decir, cualquier rotaci on, en torno a cualquier eje jo, puede no tener
efecto sobre la soluci on. Por tanto, una coordenada angular que represente
rotaci on alrededor de un eje jo debe de ser cclica, lo cual da una simpli-
cacion considerable al problema. Debido a la simetra esferica el vector de
momento angular total
L = r p
se conserva. Se deduce, por tanto, que r es perpendicular a la direcci on ja
de L. Ahora si L = 0 el movimiento debe ser a lo largo de una recta que
pase por el centro de fuerzas, ya que para L = 0 r y r son paralelas, cosa
que solo se cumple en el movimiento rectilineo, por tanto el movimiento bajo
fuerza central es siempre un movimiento plano.
Ahora bien, tomando el eje z en direcci on de L, el movimiento tendra sim-
pre lugar en un plano normal al eje z. La coordenada esferica tendra
entonces el valor constante /2 y podemos prescindir de ella en el estudio
que sigue. La conservacion del momento cinetico proporciona 3 constantes
de movimiento independientes. De hecho, dos de ellas, que expresan la
direcci on constante del momento cinetico, se han utilizado para reducir el
problema de 3 grados de libertad a dos. La tercera corresponde a la conser-
vacion del modulo de L.
En coordenadas polares la Lagrangiana es
L =
1
2
m( r
2
+r
2
2
) V (r) . (4)
22
como vimos es coordenada cclica cuya cantidad de momento canonico es
el momento cinetico
p
=
L
= mr
2
,
entonces una de las dos ecuaciones de movimiento sera
p
=
d
dt
(mr
2
) = 0 , (5)
lo que nos conduce a
mr
2
= l = cte , (6)
donde l es la magnitud constante del momento cinetico. De la ecuaci on (5)
se deduce tambien que
d
dt
_
r
2
2
_
= 0. (7)
Se introduce el termino 1/2 por la raz on de que (r
2
)/2 es la velocidad
areolar (area barrida por el vector de posici on por unidad de tiempo).
La conservacion del momento cinetico es equivalente a decir que la veloci-
dad areolar es constante. Tenemos aqui la demostracion de la segunda ley
de Kepler del movimiento planetario: el radio vector barre areas iguales en
tiempos iguales. Sin embargo debemos recalcar que la constancia de la ve-
locidad areolar es una propiedad de movimiento debido a una fuerza central
y no esta limitada a una ley de fuerza inversamente proporcional al cuadrado
de la distancia.
La ecuaci on de Lagrange restante, para la coordenada r es
d
dt
(m r) mr
2
+
V
r
= 0 . (8)
Designando por f(r) el valor de la fuerza, podemos escribir la ecuaci on en
la forma
m r mr
2
= f(r) . (9)
Utilizando la ecuaci on (6), esta ecuaci on se puede reescribir como
m r
l
2
mr
3
= f(r). (10)
Basandonos en el teorema de la conservacion de la energa
E = T +V =
1
2
m( r
2
+r
2
2
) +V (r) . (11)
23
E es una constante de movimiento. Esto lo podemos deducir de las ecuaci ones
de movimiento. La ecuaci on (10) la podemos escribir en la forma
m r =
d
dr
_
V (r) +
1
2
l
2
mr
2
_
. (12)
Ahora multipliquemos por r ambos lados de la ecuaci on
m r r =
d
dt
(
1
2
m r) =
d
dt
_
V (r) +
1
2
l
2
mr
2
_
,
o bien
d
dt
_
1
2
m r
2
+V (r) +
1
2
l
2
mr
2
_
= 0 .
Por lo tanto
1
2
m r
2
+V (r) +
1
2
l
2
mr
2
= cte (13)
y ya que (l
2
/2mr
2
) = (mr
2
/2), la ecuaci on (13) se reduce a (11).
Ahora resolvamos las ecuaciones de movimiento para r y . Despejando r
de la ecuaci on (13), tenemos
r =
2
2
m
(E V
l
2
2mr
2
) , (14)
o bien
dt =
dr
2
_
2
m
(E V
l
2
2mr
2
)
. (15)
Sea r
0
el valor de r al timepo t = 0. La integral de los 2 miembros de la
ecuaci on toma la forma
t =
_
r
r
0
dr
2
_
2
m
(E V
l
2
2mr
2
)
. (16)
Esta ecuaci on nos da t en funcion de r y de las constantes de integraci on E,
l y r
0
. No obstante se puede invertir, al menos formalmente, para dar r en
funcion de t y de las constantes. Una vez hallada r, se deduce inmediata-
mente a partir de la ecuaci on (6), que se puede escribir
d =
ldt
mr
2
. (17)
24
Si
0
es el valor inicial de , entonces (17) sera
= l
_
t
0
dt
mr
2
(t)
+
0
. (18)
Asi pues hemos ya obtenido las ecuaciones de movimiento para las variables
r y .
2.3 Ecuacion diferencial de la orbita.
Al tratar detalles concretos de problemas de fuerzas centrales reales conviene
efectuar un cambio en la orientacion de nuestro tratamiento. Hasta ahora,
resolver el problema signica hallar r y en funcion del tiempo siendo E,
l, etc. constantes de integraci on. Pero muy a menudo, lo que realmente
buscamos es la ecuaci on de la orbita, es decir, la dependencia entre r y ,
eliminando el par ametro t. En el caso de problemas de fuerzas centrales, esta
eliminaci on es particularmente sencilla ya que t solo gura en las ecuaciones
de movimiento en forma de variable respecto a la cual se deriva. En verdad,
una ecuaci on de movimiento, (6), no hace sino darnos la una relaci on denida
entre una variaci on innitesimal dt y la variaci on d correspondiente
ldt = mr
2
d. (19)
La relaci on correspondiente entre sus derivadas respecto a t y es
d
dt
=
l
mr
2
d
d
. (20)
Estas relaciones se pueden usar para convertir la ecuaci on (10) en una
ecuaci on diferente para la orbita. Tambien se pueden solucionar las ecua-
ciones de movimiento formalmente y llegar a la ecuaci on de la orbita. De
momento continuemos con la primera p osibilidad.
A partir de la ecuaci on (20) podemos escribir la segunda derivada con re-
specto a t
d
2
dt
2
=
d
d
l
mr
2
_
d
d
l
mr
2
_
y la ecuaci on de Lagrange para r, (10), queda en la forma
l
r
2
d
d
_
l
mr
2
dr
d
_
l
mr
3
= f(r) . (21)
Pero
1
r
2
dr
d
=
d(1/r)
d
.
25
Haciendo el cambio de variable u = 1/r, tenemos
l
2
u
2
m
_
d
2
u
d
2
+u
_
= f
_
1
u
_
. (22)
Como
d
du
=
dr
d
d
dr
=
1
u
2
d
dr
,
la ecuaci on (22) puede escribirse en la forma
d
2
u
d
2
+u =
m
l
2
d
du
V
_
1
u
_
. (23)
Cualquiera de las dos ecuaciones (22) o (23) es la ecuacion diferencial de la
orbita si se conoce la fuerza f o el potencial V . Inversamente si conocemos
la ecuaci on de la orbita podemos seguir los pasos inversos y obtener f o V .
Para una ley de fuerza particular cualquiera, la ecuaci on de la orbita debe
obtenerse integrando la ecuaci on (22) en una u otra forma. Puesto que ya
se ha realizado la mayor parte del trabajo al resolver la ecuaci on (10), solo
queda eliminar t de la soluci on (15) por medio de (19),
d =
ldr
mr
2
2
_
2
m
_
E V (r)
l
2
2mr
2
_
, (24)
o
=
_
r
r
0
dr
r
2
2
_
2mE
l
2
2mU
l
2
1
r
2
+
0
. (25)
Haciendo el cambio de variable u = 1/r,
=
0
_
u
u
0
du
2
_
2mE
l
2
2mU
l
2
u
2
, (26)
lo que es la soluci on formal para la ecuaci on de la orbita.
2.4 Problema de Kepler: Fuerza inversamente proporcional al
cuadrado de la distancia
La ley inversamente proporcional al cuadrado de la distancia es la mas im-
portante de todas las leyes de fuerzas centrales por lo que le daremos un
tratamiento detallado. En este caso la fuerza y el potencial son:
f =
k
r
2
y V =
k
r
. (27)
26
Para integrar la ecuaci on de la orbita sustituyamos (23) en (22),
d
2
u
d
2
+u =
mf(1/u)
l
2
u
2
=
mk
l
2
. (28)
Hacemos el cambio de variable y = u
mk
l
2
, para que la ecuaci on diferencial
quede en la forma
d
2
y
d
2
+y = 0 ,
cuya soluci on es
y = Bcos( , )
siendo B y las correspondientes constantes de integraci on. La solucin en
fuencion de r es
1
r
=
mk
l
2
[1 +e cos( )] , (29)
donde
e = B
l
2
mk
.
Podemos obtener la ecuaci on de la orbita a partir de la soluci on formal (26).
A pesar de que este procedimiento es mas largo que resolver la ecuaci on
(28), resulta ilustrativo hacerlo ya que la constante de integraci on e se evalua
automaticamente en funcion de E y l.
Escribamos (26) en la forma
=
_
du
2
_
2mE
l
2
2mU
l
2
u
2
, (30)
donde ahora se trata de una integral indenida. La cantidad que aparece
en (30) es una constante de integraci on determinada por las condiciones
iniciales y no tiene por que ser el angulo inicial
0
al tiempo t = 0. La
soluci on a este tipo de integrales es
_
dx
2
_
+x +x
2
=
1
2
arccos
_
+ 2x
2
q
_
, (31)
donde
q =
2
4.
Para aplicar este tipo de soluciones a la ecuaci on (30) debemos hacer
=
2mE
l
2
, =
2mk
l
2
, = 1,
27
y el discriminante q sera por lo tanto
q =
_
2mk
l
2
_
2
_
1 +
2El
2
mk
2
_
.
Con estas sustitucion (30) queda en la forma
= arccos
_
_
l
2
u
mk
1
2
_
1 +
2El
2
mk
2
_
_
.
Despejando u 1/r, la ecuaci on de la orbita resulta ser
1
r
=
mk
l
2
_
_
1 +
2
1 +
2El
2
mk
2
cos( )
_
_
. (32)
Comparando (32) con la ecuaci on (29) observamos que el valor de e es:
e =
2
1 +
2El
2
mk
2
. (33)
La naturaleza de la orbita depende del valor de e seg un el esquema siguiente:
e > 1, E > 0 : hiperbola,
e = 1, E = 0 : par abola,
e < 1, E < 0 : elipse,
e = 0 E =
mk
2
2l
2
: circunferencia.
2.5 Dispersi on por un centro de fuerzas.
Desde un punto de vista hist orico, el interes acerca de las fuerzas centrales
surgio en los problemas astronomicos del movimiento planetario. Sin em-
bargo, no hay raz on alguna para que s olo las consideremos en este tipo
de problemas. Otra cuesti on que podemos estudiar mediante la Mecanica
Cl asica es la dispersi on de partculas por campos de fuerzas centrales. Desde
luego, si el tama no de las partculas es del orden atomico, debemos esperar
que los resultados especcos de un tratamiento clasico sean a menudo in-
correctos desde un punto de vista fsico, ya en que tales regiones suelen ser
importantes los efectos cu anticos. A pesar de todo hay predicciones clasicas
que siguen siendo validas con buena aproximacion. Mas importante a un, los
28
procedimientos de descripci on de los fenomenos de dispersi on son los mis-
mos en la Mecanica clasica que en la cu antica; podemos aprender a hablar
el lenguaje igualmente bien bas andonos en la Mecanica cl asica.
En su formulaci on para un cuerpo, el problema de la dispersi on se ocupa de
la desviacion de partculas por un centro de fuerzas. Consideremos un haz
uniforme de partculas -da igual que sean electrones, protones o planetas- to-
das de igual masa y energa que inciden sobre un centro de fuerzas. Podemos
suponer que la fuerza disminuye tendiendo a cero a grandes distancias. El
haz incidente se caracteriza especicando su intensidad I (tambien llamada
densidad de ujo), la cual da el n umero de partculas que atraviesan en
unidad de tiempo la unidad de supercie colocada normalmente al haz. Al
acercarse una partcula al centro de fuerzas ser a atrada o repelida y su orbita
se desviar a de la trayectoria rectilnea incidente. Despues de haber pasado
el centro de fuerzas, la fuerza que se ejerce sobre la partcula ir a dismin-
uyendo de manera que la orbita tendera de nuevo a tener forma rectilnea.
En general, la direcci on nal del movimiento no coincide con la incidente
y diremos que la partcula se ha desviado o dispersado. Por denicion la
secci on ecaz, (), de dispersi on en una direcci on dada es
()d =
dN
I
, (34)
donde dN es el n umero de partculas dispersadas por unidad de tiempo en
un elemento de angulo s olido d en la direcci on . A menudo, a () se le
llama tambien secci on ecaz diferencial de dispersi on. En el caso de fuerzas
centrales debe haber una simetra total en torno al eje del haz incidente, por
lo que el elemento de angulo s olido podr a escribirse en la forma
d = 2 sind, (35)
donde es el angulo que forman las direcciones desviadas e incidentes, al
cual se le da el nombre de angulo de dispersi on.
Para una partcula dada cualquiera, las constantes de la orbita y por lo
tanto la magnitud de la dispersi on, est an determinadas por su energa y su
momento cinetico. Conviene expresar el momento cinetico en funcion de
la energa y de una cantidad s llamada par ametro de impacto que es, por
denicion, la distancia del centro de fuerzas a la recta soporte de la velocidad
incidente. Si u
0
es la velocidad incidente de la partcula, tendremos
l = mu
0
s = s
2
2mE. (36)
29
Una vez jadas E y s, queda determinado unvocamente el angulo de dis-
persi on . De momento supondremos que valores diferentes de s no pueden
llevar un mismo angulo de dispersi on. Por tanto, el n umero de partculas
dispersadas por un angulo s olido d comprendido entre y +d deber a
ser igual al n umero de partculas incidentes cuyo par ametro de impacto este
comprendido entre los valores correspondientes s y s +ds:
2Is [ds[ = 2()I sin [d[ . (37)
En la ecuaci on (37) se han introducido los valores absolutos por que los
n umeros de partculas tiene que ser siempre positivos, mientras que s y
varan a menudo en sentidos opuestos. Si consideramos s funcion de la
energa y del angulo de dispersi on correspondiente,
s = s(, E),
la dependencia entre la secci on ecaz diferencial y vendra dada por
() =
s
sin
ds
d
. (38)
A partir de la ecuaci on de la orbita (25) se puede obtener directamente una
expresi on formal del angulo de dispersi on. Tambien ahora, para mayor sen-
cillez, consideraremos el caso de una dispersi on puramente repulsiva. Como
la orbita debe ser simetrica respecto a la direcci on del peri apside, el angulo
de dispersi on vendra dado por
= 2 , (39)
donde es el angulo que forma la direcci on de la asntota incidente con
la direcci on del peri apside. A su vez, puede obtenerse de la ecuaci on
(25) haciendo r
0
= cuando
0
= (direcci on incidente), por consiguiente
= cuando r = r
m
, distancia de mayor acercamiento. Facilmente se
llega a
=
_
rm
dr
r
2
2
_
2mE
l
2
2mV
l
2
1
r
2
. (40)
Expresando l en funcion del par ametro de impacto s (ec. (36)), resulta
= 2
_
rm
sdr
r
2
_
r
2
_
1
V (r)
E
_
s
2
, (41)
30
o bien
= 2
_
um
0
sdu
2
_
1
v(u)
E
s
2
u
2
. (42)
Las ecuaciones (41) y (42) rara vez se utilizan, a no ser en el calculo numerico
directo del angulo de dispersi on. No obstante, cuando se disponga de una
expresi on analtica para las orbitas, se puede a menudo obtener una relaci on
entre y s casi por simple inspeccion.
EJEMPLO:
Este ejemplo es hist oricamente muy importante. Se trata de la dispersi on
repulsiva de partculas cargadas por causa de un campo coulombiano. El
campo de fuerzas dispersor es el creado por una carga ja Ze al ejercerse
sobre partculas incidentes que tienen carga Ze; por tanto, la fuerza se
puede escribir en la forma
f =
ZZe
2
r
2
,
es decir, se trata de una fuerza repulsiva inversamente proporcional al cuadrado
de la distancia. Escribamos la constante
k = ZZe
2
. (43)
La energa E es mayor que cero y la orbita ser a una hiperbola de excentri-
cidad dada por
=
2
1 +
2El
2
m(ZZe
2
)
2
=
2
1 +
_
2Es
ZZe
2
_
2
, (44)
donde hemos tenido en cuenta la ecuaci on (36). Si se toma igual a el angulo
de la ecuaci on (29), el peri apside correspondera a = 0 y la ecuaci on de
la orbita queda en la forma
1
r
=
mZZe
2
l
2
[ cos 1] . (45)
La direcci on de la asntota de incidencia queda entonces determinada por
la condici on r :
cos =
1
,
o sea, seg un la ecuaci on (39),
sin
2
=
1
.
31
Luego
cot
2
2
=
2
1,
y utilizando la ecuaci on (44)
cot
2
=
2Es
ZZe
2
.
La relaci on funcional buscada entre el par ametro de impacto y el angulo de
dispersi on ser a p ues,
s =
ZZe
2
2E
cot
2
, (46)
de manera que efectuando la transformacion que exige la ecuaci on (38),
encontramos que () viene dada por
() =
1
4
_
ZZe
2
2E
_
2
csc
4
2
. (47)
La ecuaci on (47) da la famosa secci on ecaz de dispersi on de Rutherford,
quien la dedujo para la dispersi on de partculas por los n ucleos atomicos.
La mec anica cu antica da, en el limite no relativista, una secci on ecaz coin-
cidente con este resultado clasico.
En fsica atomica tiene mucha importancia el concepto de secci on ecaz total
de dispersi on
T
cuya denicon es
T
=
_
4
()d = 2
_
0
()d .
No obstante, si intentamos calcular la secci on ecaz total para dispersi on
coulombiana sustituyendo la ecuaci on (47) en esta denicion obtenemos un
resultado innito. La raz on fsica de esto es facil de ver. Seg un su denicion,
la secci on ecaz total es el n umero de partculas que, por unidad de inten-
sidad incidente, se dispersan en todas direcciones. Ahora bien, el campo
coulombiano constituye un ejemplo de fuerza de largo alcance; sus efec-
tos se extienden hasta el innito. Las desviaciones muy peque nas solo tienen
lugar en el caso de partculas de par ametro de impacto muy grande. Por
tanto, todas las partculas de un haz incidente de extensi on lateral innita
se desviaran m as o menos y deben de incluirse en la secci on ecaz total de
dispersi on. Queda claro, pues, que el valor innito de
T
no es peculiar del
campo coulombiano, tiene lugar en Mecanica clasica siempre que el campo
32
dispersor sea diferente de cero a todas las distancias independientemente de
lo grande que sean.
BIBLIOGRAFIA COMPLEMENTARIA
L.S. Brown, Forces giving no orbit precession, Am. J. Phys. 46, 930 (1978)
H. Goldstein, More on the prehistory of the Laplace-Runge-Lenz vector, Am.
J. Phys. 44, 1123 (1976)
33
3. CUERPO R
IGIDO
Prologo: Por las particularidades de su movimiento, el estudio del cuerpo
rgido ha generado nuevas tecnicas y procedimientos matematicos intere-
santes.
CONTENIDO:
3.1 Denici on.
3.2 Grados de libertad.
3.3 Tensor de inercia (con ejemplo).
3.4 Momento angular.
3.5 Ejes principales de inercia (con ejemplo).
3.6 El teorema de los ejes paraleles (con 2 ejemplos).
3.7 Dinamica del cuerpo rgido (con ejemplo).
3.8 Trompo simetrico libre de torcas.
3.9 Angulos de Euler.
3.10 Trompo simetrico con un punto jo.
34
3.1 Denicion.
Un cuerpo rgido se dene como un sistema de partculas cuyas distancias
relativas est an obligadas a permanecer absolutamente jas.
3.2 Grados de libertad.
Para describir el movimiento general de un s olido rgido en el espacio tridi-
mensional s olo requerimos de 6 cantidades, por ejemplo: las 3 coordenadas
del centro de masa medidas desde un sistema inercial y 3 angulos para especi-
car la orientacion del s olido (o de un sistema jo en el s olido con origen en
el centro de masa) decimos que un cuerpo rgido en el espacio tiene 6 grados
de libertad.
El n umero de grados de libertad puede ser menor en los casos en que el
s olido est a sujeto a restricciones, por ejemplo:
Si el s olido s olo gira alrededor de un eje m ovil es de un grado de
libertad (basta con un angulo).
Si el s olido se mueve en el plano, su movimiento es mas general requiere
de 5 cantidades (2 grados de libertad traslacional y 3 grados de libertad
rotacional).
3.3 Tensor de inercia.
Consideremos que el cuerpo constituido por N partculas de masas m
,
= 1, 2, 3..., N. Si el cuerpo rota con velocidad angular alrededor de un
punto jo del cuerpo, y este punto a su vez se mueve a velocidad v respecto
al sistema jo (inercial), entonces la velocidad de la -esima partcula re-
specto al sistema inercial est a dada por
v
= v + r
. (1)
La energa cinetica de la -esima partcula es
T
=
1
2
m
v
2
, (2)
donde
v
2
= v
= (v + r
) (v + r
) (3)
= v v + 2v ( r
) + ( r
) ( r
)
= v
2
+ 2v( r
) + ( r
)
2
. (4)
35
Entonces la energa total es
T =
1
2
m
v
2
+
[v ( r
)] +
+
1
2
( r
)
2
;
T =
1
2
Mv
2
+v [
] +
1
2
( r
)
2
.
Si el origen esta jo al s olido lo elegimos en el centro de masas, entonces
R =
M
= 0,
por lo que
T =
1
2
Mv
2
+
1
2
( r
)
2
(5)
T = T
trans
+T
rot
(6)
donde
T
trans
=
1
2
v
2
=
1
2
Mv
2
(7)
T
rot
=
1
2
( r
)
2
. (8)
Ahora usaremos en la ecuaci on (8) la identidad vectorial
(AB)
2
= A
2
B
2
(A B)
2
(9)
entonces la ecuaci on nos queda en la forma
T
rot
=
1
2
2
r
2
( r
)
2
_
que en terminos de las componentes de y r
= (
1
,
2
,
3
) y r
= (x
1
, x
2
, x
3
)
T
rot
=
1
2
_
_
2
i
__
k
x
2
k
_
i
x
i
_
_
j
x
j
__
.
Ahora introducimos
i
=
j
ij
j
T
rot
=
1
2
ij
m
ij
_
k
x
2
k
_
j
x
i
x
j
_
(10)
36
T
rot
=
1
2
ij
ij
k
x
2
k
x
i
x
j
_
. (11)
Podemos escribir T
rot
como
T
rot
=
1
2
ij
I
ij
j
(12)
donde
I
ij
=
ij
k
x
2
k
x
i
x
j
_
. (13)
Las 9 cantidades de I
ij
constituyen las componentes de de una nueva can-
tidad matem atica que denotamos por I
ij
y se llama Tensor de Inercia,
I
ij
se puede escribir convenientemente mediante un arreglo matricial de
(3 3)
I
ij
=
_
_
_
I
11
I
12
I
13
I
21
I
22
I
23
I
31
I
32
I
33
_
_
_
=
_
_
_
(x
2
2
+x
2
3
)
x
1
x
2
x
1
x
3
x
2
x
1
(x
2
1
+x
2
3
)
x
2
x
3
x
3
x
1
x
3
x
2
(x
2
1
+x
2
2
)
_
_
_.
(14)
Podemos notar que I
ij
= I
ji
por lo tanto I
ij
es un tensor simetrico, por
lo tanto solo hay 6 terminos independientes. Los elementos diagonales de
I
ij
se llaman momentos de inercia con respecto a los ejes de coordenadas,
los negativos de los elementos no diagonales se llaman productos de inercia.
Para una distribucion continua de masa de densidad (r), I
ij
se escribe
en lugar de (13) como
I
ij
=
_
V
(r)
_
ij
k
x
2
k
x
i
x
j
_
dV. (15)
EJEMPLO:
Calcular los elementos I
ij
del tensor de inercia I
ij
para un cubo uniforme
de lado b, masa M, una esquina esta en el origen.
I
11
=
_
V
_
x
2
1
+x
2
2
+x
2
3
x
1
x
1
_
dx
1
dx
2
dx
3
=
b
_
0
b
_
0
b
_
0
(x
2
2
+x
2
3
)dx
1
dx
2
dx
3
.
37
El resultado de la integral tres dimencional es I
11
=
2
3
(b
3
)
2
=
2
3
Mb
2
.
I
12
=
_
V
(x
1
x
2
)dV =
b
_
0
b
_
0
b
_
0
(x
1
x
2
)dx
1
dx
2
dx
3
=
1
4
b
5
=
1
4
Mb
2
.
Vemos que las demas integrales son las mismas por lo que
I
11
= I
22
= I
33
=
2
3
Mb
2
I
ij
i=j
=
1
4
Mb
2
,
entonces la matriz queda de la forma
I
ij
=
_
_
_
2
3
Mb
2
1
4
Mb
2
1
4
Mb
2
1
4
Mb
2 2
3
Mb
2
1
4
Mb
2
1
4
Mb
2
1
4
Mb
2 2
3
Mb
2
_
_
_.
3.4 Momento angular.
El momento angular para el s olido rgido constituido por N partculas m
esta dado por
L =
, (16)
donde
p
= m
= m
( r
) . (17)
Sustituyendo (17) en la ecuaci on (16), tenemos que
L =
( r
) .
Utilizando la identidad vectorial
A(BA) = (A A)B(A B)A = A
2
B(A B)A ,
tenemos
L =
(r
2
( r
).
Tomando la i-esima componente del vector L
L
i
=
k
x
2
k
_
x
i
_
j
x
j
j
_
,
38
introduciendo la ecuaci on
i
=
j
ij
,
obtenemos
L
i
=
j
ij
k
x
2
k
_
j
x
j
x
j
j
_
(18)
=
j
j
ij
_
k
x
2
k
x
i
x
j
_
(19)
=
j
j
ij
k
x
2
k
x
i
x
j
_
. (20)
Comparando con la ecuaci on (13)
L
i
=
j
I
ij
j
. (21)
Esta ecuaci on tambein se puede escribir en la forma
L =I
ij
, (22)
o
_
_
_
L
1
L
2
L
3
_
_
_ =
_
_
_
I
11
I
12
I
13
I
21
I
22
I
23
I
31
I
32
I
33
_
_
_
_
_
_
3
_
_
_. (23)
La energa cinetica rotacional, T
rot
, se puede relacionar con el momento
angular de la siguiente manera: multipliquemos la ecuaci on ( 21) por
1
2
i
1
2
L
i
=
1
2
j
I
ij
j
, (24)
sumando sobre todas las i da
i
1
2
L
i
i
=
1
2
ij
I
ij
j
.
Al comparar esta ecuaci on con (12), vemos que el segundo termino no es
mas que T
rot
, por lo tanto
T
rot
=
I
1
2
L
i
i
=
1
2
L . (25)
Ahora, sustituimos (22) en la ecuaci on (25), obtenemos una relaci on entre
la T
rot
y el tensor de inercia
T
rot
=
1
2
I
ij
. (26)
39
3.5 Ejes principales de inercia.
Consideremos que el tensor de inercia I
ij
es diagonal, es decir I
ij
= I
i
ij
,
la energa cinetica rotacional y el momento angular quedarian expresadas
en la siguiente forma
T
rot
=
1
2
ij
I
ij
j
=
1
2
ij
ij
I
i
j
T
rot
=
1
2
i
I
i
2
i
(27)
y el momento angular
L
i
=
j
I
ij
j
=
ij
I
i
j
= I
i
i
L = I. (28)
Encontrar una expresi on diagonal para I
ij
equivale a encontrar un nuevo
sistema de 3 ejes, en los cuales la energa cinetica y el momento angular se
reducen a las expresiones (27) y (28), tales ejes se les llama Ejes Princi-
pales de Inercia, es decir dado un cierto sistema inicial de coordenadas en
el cuerpo, podemos pasar de el a los ejes principales mediante una transfor-
maci on ortogonal particular que, en consecuencia, se llama transformaci on
a los ejes principales.
Igualando las componentes de (22) y (28), tenemos
L
1
= I
1
= I
11
1
+I
12
2
+I
13
3
(29)
L
2
= I
2
= I
21
1
+I
22
2
+I
23
3
(30)
L
3
= I
3
= I
31
1
+I
32
2
+I
33
3
, (31)
las cuales son un conjunto de ecuaciones que se pueden reescribir
(I
11
I)
1
+I
12
2
+I
13
3
= 0 (32)
I
21
1
+ (I
22
I)
2
+I
23
3
= 0
I
31
1
+I
32
2
+ (I
33
I)
3
= 0 .
40
Para obtener la soluci on, el determinante del sistema debe ser cero
(I
11
I)
1
I
12
2
I
13
3
I
21
1
(I
22
I)
2
I
23
3
I
31
1
I
32
2
(I
33
I)
3
= 0 . (33)
El desarrollo de este determinante es un polinomio de grado 3 en I, lla-
mado polinomio caracterstico y la ecuaci on (33) se llama ecuaci on secular o
ecuaci on caracterstica. En la pr actica, los momentos principales de inercia,
por ser los valores propios de I, se hallan buscando las races de la ecuaci on
secular.
EJEMPLO:
Determinar los ejes principales de inercia para el cubo del ejemplo anterior.
Al sustituir los valores obtenidos en el ejemplo anterior en la ecuaci on (33)
obtenemos:
_
_
_
(
2
3
I)
1
4
1
4
1
4
(
2
3
I)
1
4
1
4
1
4
(
2
3
I)
_
_
_
= 0 ,
donde = Mb
2
, de donde obtenemos la caracterstica,
_
11
12
I
__
11
12
I
__
1
6
I
_
= 0 ,
entonces los eigenvalores o momentos principales de inercia son:
I
1
=
1
6
, I
2
= I
3
=
11
12
,
cuyos correspondientes eigenvalores son:
I =
1
6
1
2
3
_
_
_
1
1
1
_
_
_, I
2
, I
3
=
11
12
1
2
2
_
_
_
_
_
1
1
0
_
_
_,
_
_
_
1
0
1
_
_
_
_
_
.
Entonces la matriz que diagonaliza a I
ij
es:
=
2
_
1
3
_
_
_
_
_
1
2
_
3
2
2
_
3
2
1
2
_
3
2
0
1 0
2
_
3
2
_
_
_
_
_
.
41
I
ij
diagonalizado es:
I
ij
diag
= ()
I
ij
=
_
_
_
1
6
0 0
0
11
12
0
0 0
11
12
_
_
_.
3.6 El teorema de los ejes paralelos.
Supongamos que el sistema x
1
, x
2
, x
3
tiene su origen en el centro de masas
del cuerpo rgido. Un segundo sistema X
1
, X
2
, X
3
, tiene su origen en otra
posici on diferente al sistema anterior. la unica condici on es que sean par-
alelos, denamos los vectores r = (x
1
, x
2
, x
3
), R = (X
1
, X
2
, X
3
) y a =
(a
1
, a
2
, a
3
), de tal manera que R = r +a o en terminos de sus componentes
X
i
= x
i
+a
i
. (34)
Sean J
ij
las componentes del tensor de inercia respecto al sistema X
1
X
2
X
3
,
J
ij
=
ij
k
X
2
k
X
i
X
j
_
. (35)
Sustituimos (34) en (35),
J
ij
=
ij
k
(x
k
+a
k
)
2
(x
i
+a
i
)(x
j
+a
j
)
_
=
_
ij
k
(x
k
)
2
x
i
x
j
_
+
ij
k
a
2
k
a
i
a
j
_
(36)
+[
k
2a
k
ij
(
x
k
) a
j
(
x
j
) a
i
(
x
i
)] .
Pero la coordenada del centro de masa se dene como
x =
M
y como habiamos dicho antes, el origen esta en el centro de masa
( x
1
, x
2
, x
3
) = (0, 0, 0) .
Ahora si tambien comparamos primer termino de (36) con la ecuaci on (13),
tendremos:
J
ij
= I
ij
+M(a
2
ij
a
i
a
j
) (37)
42
y entonces los elementos del tensor de inercia I
ij
para el sistema del centro
de masa estar an dadas por:
I
ij
= J
ij
M(
ij
a
2
a
i
a
j
) . (38)
Este es el Teorema de los Ejes Paralelos.
EJEMPLO:
Calcular I
ij
para el cubo anterior respecto a un sistema paralelo al primer
ejemplo y con origen en el centro de masa.
Ya sabemos del ejemplo anterior que:
J
ij
=
_
_
_
2
3
1
4
1
4
1
4
2
3
1
4
1
4
1
4
2
3
_
_
_ .
Ahora el vector a = (
b
2
,
b
2
,
b
2
) y a
2
=
3
4
b
2
, entonces usando la ecuaci on (38)
y el hecho que = Mb
2
tenemos,
I
11
= J
11
M(a
2
a
2
1
) =
1
6
Mb
2
(39)
I
22
= J
22
M(a
2
a
2
2
) =
1
6
Mb
2
(40)
I
33
= J
33
M(a
2
a
2
3
) =
1
6
Mb
2
(41)
I
12
= J
12
M(a
1
a
2
) = 0 (42)
I
12
= I
13
= I
23
= 0 , (43)
por lo tanto
I =
_
_
_
1
6
Mb
2
0 0
0
1
6
Mb
2
0
0 0
1
6
Mb
2
_
_
_.
EJEMPLO:
Consideremos el caso en el que el vector a = (0,
b
2
,
b
2
) y a
2
=
b
2
2
, entonces
nuestro nuevo tensor de inercia seria:
I
11
= J
11
M(a
2
a
2
1
) =
_
2
3
Mb
2
_
M
_
b
2
2
0
_
=
1
6
Mb
2
(44)
I
22
= J
22
M(a
2
a
2
2
) =
_
2
3
Mb
2
_
M
_
b
2
2
b
2
4
_
=
5
12
Mb
2
(45)
I
33
= J
33
M(a
2
a
2
3
) =
_
2
3
Mb
2
_
M
_
b
2
2
b
2
4
_
=
5
12
Mb
2
(46)
I
12
= J
12
M(a
1
a
2
) =
_
1
4
Mb
2
_
M(0) =
1
4
Mb
2
(47)
43
I
13
= J
13
M(a
1
a
3
) =
_
1
4
Mb
2
_
M(0) =
1
4
Mb
2
(48)
I
23
= J
23
M(a
2
a
3
) =
_
1
4
Mb
2
_
M(
1
4
Mb
2
) = 0 , (49)
entonces I
ij
es igual a:
I
ij
=
_
_
_
1
6
Mb
2
1
4
Mb
2
1
4
Mb
2
1
4
Mb
2 5
12
Mb
2
0
1
4
Mb
2
0
5
12
Mb
2
_
_
_ .
3.7 Dinamica del cuerpo rgido.
La raz on de cambio respecto al tiempo del momento angular L esta dado
por:
_
dL
dt
_
inercial
= N
(e)
. (50)
Para la descripcion desde el sistema jo al s olido debemos usar la identidad
operadora
_
d
dt
_
inercial
=
_
d
dt
_
cuerpo
+ . (51)
Aplicando este operador a la ecuaci on (50)
_
dL
dt
_
inercial
=
_
dL
dt
_
cuerpo
+ L. (52)
Entonces, en lugar de la ecuaci on (50) tendremos
_
dL
dt
_
cuerpo
+ L = N. (53)
Ahora proyectamos la ecuaci on (53) sobre los ejes principales de inercia,
supongamos que estos son (x
1
, x
2
, x
3
), T
rot
y L se simplican con tal eleccion,
por ejemplo:
L
i
= I
i
i
(54)
la componente i-esima de (53) es
dL
i
dt
+
ijk
j
L
k
= N
i
. (55)
44
Ahora proyectando sobre los ejes principales de inercia y utilizando la ecuaci on
(54), la ecuaci on (55) toma la forma:
I
i
d
i
dt
+
ijk
k
I
k
= N
i
(56)
ya que los elementos principales de inercia son independiantes del tiempo.
Entonces, asi obtenemos un sistema de ecuaciones
I
1
1
+
2
3
(I
2
I
3
) = N
1
(57)
I
2
2
+
3
1
(I
3
I
1
) = N
2
I
3
3
+
1
2
(I
1
I
2
) = N
3
.
Estas son las llamadas Ecuaciones de Euler.
EJEMPLO:
Rodamiento y deslizamiento de una bola de billar. Demostrar que despues
de un golpe horizontal la bola de desplaza resbalando una distancia
x
1
=
12u
2
0
49g
,
para despues empezar a rodar sin resbalar al tiempo
t
1
=
2u
0
7g
.
Al cesar la fuerza impulsiva las condiciones iniciales son:
x
0
= 0, x
0
= u
0
= 0,
= 0 .
La fuerza de friccion es
F
f
= ge
1
,
entonces la ecuaci on de movimiento es
x = gM. (58)
La ecuaci on para L es
dL
3
dt
= I
3
= N
3
(59)
45
donde I
3
es
I
3
=
_
(r)
_
x
2
1
x
2
2
_
dx
1
dx
2
dx
3
=
2
5
Ma
2
y
N
3
= F
f
a = Mga .
Sustituyendo en la ecuaci on (59), tenemos
a
=
5
2
g. (60)
Ahora integrando las ecuaciones (58) y (60) una sola vez
x = gt +C
1
(61)
a
=
5
2
gt +C
2
(62)
y aplicandoles las condiciones iniciales, tales ecuaciones quedan en la forma
x(t) = gt +u
0
(63)
a
(t) =
5
2
gt. (64)
Para que haya rodamiento puro, sin friccion se necesita que
x(t) = a
(t). (65)
De la ecuaci on (64) y (65) evaluadas en t
1
5
2
gt
1
= gt
1
+u
0
t
1
=
2u
0
7g
. (66)
Ahora integrando de nuevo la ecuaci on (63) y aplicando las condiciones
iniciales tenemos que
x(t) = g
t
2
2
+u
0
t . (67)
Evaluando la ecuaci on (67) y (63) en el tiempo t
1
x =
12u
2
49g
46
x =
5
7
u
0
.
3.8 Trompo simetrico libre de torcas.
Un trompo simetrico es cualquier s olido de revoluci on. Si los momentos de
inercia son
I
1
= I
2
= I
3
trompo esferico
I
1
= I
2
,= I
3
trompo simetrico
I
1
,= I
2
,= I
3
trompo asimetrico.
Tomemos el caso del trompo simetrico I
1
= I
2
,= I
3
, en este caso el eje X
3
es el eje de simetria. Las ecuaciones de Euler proyectadas sobre los ejes
principales de inercia son:
I
1
1
+
2
3
(I
2
I
3
) = N
1
(68)
I
2
2
+
3
1
(I
3
I
1
) = N
2
(69)
I
3
3
+
1
2
(I
1
I
2
) = N
3
. (70)
Como el sistema que estamos considerando esta libre de torcas
N
1
= N
2
= N
3
= 0 , (71)
utilizando el hecho que I
1
= I
2
en la ecuaci on (71), obtenemos
I
1
1
+
2
3
(I
2
I
3
) = 0 (72)
I
2
2
+
3
1
(I
3
I
1
) = 0 (73)
I
3
3
= 0. (74)
La ecuaci on (74) implica que
3
= cte.
Las ecuaciones (72) y (73) las reescribimos como:
1
=
2
donde =
3
_
I
3
I
1
I
1
_
(75)
2
=
1
. (76)
47
Multiplicando la ecuaci on (76) por i y sumandola a la ecuaci on (75), tenemos
(
1
+i
2
) = (
2
i
1
)
(
1
+i
2
) = i(
1
+i
2
).
Sea (t) =
1
(t) +i
2
(t) entonces
(t) i(t) = 0 ,
cuya soluci on es
(t) = Aexp(it) .
Esto implica que
(
1
+i
2
) = Acos(t) +i sin(t) ,
entonces
1
= Acos(t) (77)
2
= Asin(t). (78)
La magnitud del vector es
= [[[[ =
2
1
+
2
+
3
=
2
_
A
2
+
2
3
= cte ,
esto signica que la magnitud de no cambia en el tiempo. Este vector
realiza un movimiento de precesion y la frecuencia de precesion esta dada
por
=
3
_
I
3
I
1
I
1
_
,
adem as notamos que es constante.
Si le llamamos al angulo entre y X
3
las ecuaciones (77) y (78) toman la
forma
1
= sin cos(t)
2
= sin sin(t)
1
= cos ,
donde A = sin .
Para un s olido de revoluci on achatado I
1
= I
2
= I
12
y I
3
> I
1
. Para el caso
de la tierra
=
3
_
I
3
I
12
I
12
_
3
305
.
48
Las observaciones indican un valor promedio de 14 meses 450 das. (Esto
se debe a que no es un solido estrictamente, su estructura interna es lquida).
3.9 Angulos de Euler.
Como sabemos una rotaci on se puede representar por una matriz de rotaci on
a traves de la ecuaci on
x = x. (79)
x representa el conjunto de ejes del sistema rotado con respecto al sistema
cuyos ejes representamos por x. La rotaci on puede llevarse a cabo por
una sucesion de rotaciones parciales =
1
2
...
n
. Existen muchas posi-
bilidaddes para elegir estas s. Una de ellas es el conjunto de angulos ,
y llamados angulos de Euler, los cuales se generan a traves de la siguiente
serie de rotaciones:
Una rotaci on alrededor del eje X
3
en un angulo (en sentido positivo).
La matriz asociada a esta rotaci on es:
=
_
_
_
cos sin 0
sin cos 0
0 0 1
_
_
_ .
Una rotaci on un angulo alrededor del eje X
1
(sentido positivo). La
matriz asociada es:
=
_
_
_
1 0 0
0 cos sin
0 sin cos
_
_
_.
Una rotaci on en un angulo alrededor del eje X
3
(sentido positivo),
la matriz asociada a esta rotaci on es:
=
_
_
_
cos sin 0
sin cos 0
0 0 1
_
_
_.
La transformacion completa del sistema de ejes X
1
, X
2
, X
3
al sistema con
ejes X
1
, X
2
, X
3
est a dada por (79), donde
=
.
49
Haciendo el producto de matrices
11
= cos cos cos sin sin
21
= sincos cos sin cos
31
= sin sin
12
= cos sin + cos cos sin
22
= sinsin + cos cos sin
32
= sin cos
13
= sin cos
21
= cos sin
33
= cos
donde
=
_
_
_
11
12
13
21
22
23
31
32
33
_
_
_.
Ahora, consideremos el hecho de que:
est a dirigida a lo largo del eje X
3
(jo).
est a dirigido a lo largo de la linea de nodo.
est a dirigido a lo largo del eje X
3
(cuerpo).
Podemos escribir 3 componentes de cada uno de los 3 vectores en el sistema
X
1
, X
2
, X
3
como:
1
=
sin sin,
1
=
cos
1
= 0
2
=
sin cos ,
2
=
sin
2
= 0
1
=
cos ,
3
= 0
3
= ,
entonces
=
+
+
=
__
1
+
1
+
1
_
,
_
2
+
2
+
2
_
,
_
3
+
3
+
3
__
.
50
Entonces las componentes de son:
1
=
sin sin +
cos
2
=
sin cos
sin
3
=
cos + .
3.10 Trompo simetrico con un punto jo.
Como ejemplo mas complicado de la aplicaci on de los metodos de la din amica
del cuerpo rgido, vamos a considerar el movimiento de un cuerpo simetrico
en un campo gravitacional uniforme cuando un punto del eje de simetria
este jo en el espacio.
El eje de simetria es, desde luego, uno de los ejes principales y lo tomaremos
como el eje z del sistema de coordenadas solidario al cuerpo. Como hay
un punto jo, la conguracion del trompo quedar a determinada por los tres
angulos de Euler: da la inclinaci on del eje z respecto a la vertical, mide
el acimut del trompo respecto a la vertical, mientras que es el angulo de
rotaci on del trompo respecto a su propio eje z. La distancia del centro de
gravedad al punto jo ser a representada por l. para obtener una soluci on
del movimiento del trompo vamos a utilizar el metodo de Lagrange en vez
de las ecuaciones de Euler.
La energa cinetica es:
T =
1
2
I
1
(
2
1
+
2
2
) +
1
2
I
3
2
3
,
o bien, en funcion de los angulos de Euler
T =
1
2
I
1
(
2
sin
2
+
2
) +
1
2
I
3
(
cos + )
2
,
donde han desaparecido los terminos en los que guraban
2
1
y
2
2
. Conoce-
mos un teorema elemental seg un el cual en un campo gravitatorio constante
la energa potencial es la misma que se tendra si el cuerpo estuviera con-
centrado en su centro de masa, pero vamos a dar una demostracion formal
del mismo. La energa potencial del cuerpo es la suma extendida de todas
sus partculas:
V = m
i
r
i
g , (80)
donde g es el vector constante que representa la aceleraci on de la gravedad,
seg un como se dene el centro de masa, esto es equivalente a
V = MR
i
g, (81)
51
lo que demuestra el teorema. La energa potencial en funci on de los angulos
de Euler es:
V = Mgl cos , (82)
con lo que la Lagrangiana ser a
L =
1
2
I
1
(
2
sin
2
+
2
) +
1
2
I
3
(
cos + )
2
Mgl cos . (83)
Notamos que y son coordenadas cclicas, por lo tanto p
y p
son
constantes del movimiento.
p
=
L
= I
3
( +
cos ) = cte (84)
y
p
=
L
= I
1
sin
2
+I
3
(
cos
2
+ cos ) = cte. (85)
De la ecuaci on (84) despejamos
=
p
I
3
cos
I
3
, (86)
sustituimos en la ecuaci on (85)
p
=
L
= I
1
sin
2
+I
3
(
cos
2
+
p
I
3
cos
I
3
cos ) = cte
p
= I
1
sin
2
+p
cos ,
de donde obtenemos
=
p
cos
I
1
sin
2
. (87)
Sustituyendo en (86)
=
p
I
3
cos
I
1
sin
2
cos . (88)
Ahora, como el sistema es conservativo, otra constante de movimiento es la
energa.
E = T +V =
1
2
I
1
(
2
sin
2
+
2
) +
1
2
I
3
(
cos + )
2
+Mgl cos .
52
La cantidad I
3
3
= p
es una constante de moviento, multiplicando esta
constante por p
3
se obtiene
I
3
p
2
3
= p
2
3
I
2
3
3
3
= p
2
3
1
2
I
3
2
3
=
1
2
p
2
I
3
.
La cantidad
1
2
I
3
2
3
es una constante, entonces podemos denir la cantidad
E = E
1
2
I
3
2
3
= cte
=
1
2
I
1
2
+
1
2
I
1
2
sin
2
+Mgl cos ,
de donde identicamos
V () =
1
2
2
sin
2
+Mgl cos
V () =
1
2
I
1
_
p
cos
I
1
sin
2
_
2
sin
2
+Mgl cos . (89)
Entonces Ees:
E=
1
2
I
1
2
+V () .
De esta ecuaci on despejamos
e integramos para obtener
=
_
2
I
1
(EV ())
_
2
=
d
dt
,
de donde obtenemos
t() =
_
d
2
_
_
2
I
1
_
(EV ())
. (90)
Al realizar la integral de la ecuaci on (90) se obtiene t = f(), de donde en
principio podemos despejar y obtener (t). Entonces (t) se sustituye en
las ecuaciones para
y (ecs. (87) y (88)) y al integrarlas obtenemos la
soluci on completa a nuestro problema.
53
Bibliograa.
H. Goldstein, Mec anica Cl asica, (Reverte, 1992).
L. D. Landau y E. M. Lifshitz, Mec anica, (Reverte, 1969).
J. B. Marion, Din amica Cl asica de las Partculas y Sistemas, (Reverte,
1995).
W. Wrigley & W.M. Hollister, The Gyroscope: Theory and application,
Science 149, 713 (Aug. 13, 1965).
54
4. OSCILACIONES PEQUE
NAS.
Prologo: Una forma muy com un de movimienteo en los sistemas mec anicos,
son las peque nas oscilaciones. Estas las encontramos en sistemas tales
como vibraciones atomicas, moleculares, circuitos electricos, acustica. Todo
movimiento alrededor de las posici ones de equilibrio estable, es el llamado
vibratorio.
CONTENIDO:
4.1 OSCILADOR ARMONICO SIMPLE.
4.2 OSCILADOR ARMONICO FORZADO.
4.3 OSCILADORES ARMONICOS AMORTIGUADOS.
4.4 MODOS NORMALES.
4.5 RESONANCIA PARAMETRICA.
55
4.1 OSCILADOR ARMONICO SIMPLE.
Un sistema se encuentra en equilibrio estable cuando su energa potencial
U(q) es mnima; al separarlo de esta posici on se origina una fuerza dU/dq
que tiende a devolver al sistema al equilibrio. Sea q
0
el valor de la coorde-
nada generalizada correspondiente a la posici on de equilibrio. Al desarrollar
U(q) U(q
0
) en serie de potencias de Taylor de q q
0
para peque nas desvia-
ciones de la posici on de equilibrio
U(q) U(q
0
)
=
1
2
k(q q
0
)
2
,
donde:
U
q
= 0
U(q) = 0 ,
es decir: no hay fuerzas externas que act uan sobre el sistema y se ha escogido
el nivel de referencia de tal modo que coincide con la posici on de equilibrio;
adem as de despreciar terminos de orden superior. El coeciente k representa
el valor de la segunda derivada U(q) para q=q
0
. Por simplicacion haremos
la siguiente designacion
x = q q
0
con lo que la ecuaci on de energa potencial toma la forma:
U(x) =
1
2
kx
2
. (1)
La energa cinetica de un sistema es en general de la forma
T =
1
2
m
x
2
(2)
con (1) y (2) obtemos la expresi on para la Lagrangiana de un sistema que re-
aliza oscilaciones lineales (a tal sistema se le llama frecuentemente oscilador
lineal):
L =
1
2
m
x
2
1
2
kx
2
. (3)
La ecuaci on de movimiento correspondiente a esta L es:
56
m
x +kx = 0 ,
o bien
x +w
2
x = 0 , (4)
donde w
2
=
_
k/m. La ecuaci on diferencial tiene dos soluciones independi-
entes: cos wt y senwt, as, formamos la soluci on general:
x = c
1
cos wt +c
2
senwt , (5)
o bien, podemos expresar la soluci on de la forma:
x = a cos(wt +) . (6)
Puesto que cos(wt + ) = cos wt cos senwtsen, la comparacion con
(5) muestra que las constantes arbitrarias a y est an relacionadas con los
coecientes c
1
y c
2
de la forma:
a =
_
(c
2
1
+c
2
2
), y tan = c
1
/c
2
.
As: un sistema en las proximidades de su posici on de equilibrio estable,
ejecuta un movimiento oscilatorio arm onico. El coeciente a en (6) es la
amplitud de las oscilaciones, y el argumento del coseno su fase; es el
valor inicial de la fase, y depende evidentemente de la eleccion del origen de
tiempos. La magnitud w es la frecuencia angular de las oscilaciones, esta no
depende de las condiciones inicales del sistema por lo cual es la caracterstica
fundamental de las oscilaciones.
A menudo la soluci on es expresada de la forma
x = re [Aexp(iwt)]
donde A es la amplitud compleja, su modulo es la amplitud ordinaria:
A = a exp(i) .
La energa de un sistema que realiza peque nas oscilaciones es:
E =
1
2
m
x
2
+
1
2
kx
2
,
57
o sustituyendo (6)
E =
1
2
mw
2
a
2
.
Ahora, consideremos el caso para un n umero n de grados de libertad. En
este caso seguiremos considerando que la suma de las fuerzas que actuan es
cero, con lo que
Q
i
=
U
q
i
= 0 . (7)
Procediendo de igual forma que en el caso de un s olo grado de libertad, re-
alizamos una expancion en series de Taylor para la energa potencial donde
ahora consideramos un mnimo para q
i
= q
i0
. Introduciendo peque nos de-
splazamientos
x
i
= q
i
q
i0
,
al realizar la expancion en series
U(q
1
, q
2
, ..., q
n
) = U(q
10
, q
20
, ..., q
n0
)+
_
U
q
i
_
0
x
i
+
1
2!
_
2
U
q
i
q
j
_
0
x
i
x
j
+....
(8)
Bajo las mismas consideraciones que se hicieron en (1), llegamos a la sigu-
iente relaci on:
U(q
1
, q
2
, ..., q
n
) = U =
1
2
i,j
k
ij
x
i
x
j
. (9)
De la ecuaci on (8) se puede notar que k
ij
= k
ji
, es decir son simetricos
con respecto a sus ndices. Ahora consideremos la situacion para la energa
cinetica. Esta en general es de la forma
1
2
a
ij
(q)
x
i
x
j
,
donde las a
ij
s olo son funciones de las coordenadas. Al designar estas a
ij
=
m
ij
la energa cinetica es de la forma
T =
1
2
i,j
m
ij
x
i
x
j
. (10)
58
Una vez conociendo las energias tenemos que la Lagrangiana para sistemas
con n grados de libertad es de la forma
L = T U =
1
2
i,j
(m
ij
x
i
x
j
k
ij
x
i
x
j
) . (11)
Esta Lagrangiana lleva a las ecuaciones diferenciales de movimientos simul-
taneas
d
dt
L
x
i
L
x
i
= 0 (12)
o bien
(m
ij
x
j
+k
ij
x
j
) = 0 . (13)
Tenemos as un sistema de ecuaciones diferenciales lineales y homogeneas,
las cuales pueden pueden ser considerasdas como las n componenetes de la
ecuaci on matricial
(M)(
X) + (K)(X) = 0 , (14)
donde las matrices est an denidas por:
(M) =
_
_
_
_
_
_
m
11
m
12
... m
1n
m
21
m
22
... m
2n
.
.
.
.
.
.
m
n1
m
n2
... m
nn
_
_
_
_
_
_
(15)
(K) =
_
_
_
_
_
_
k
11
k
12
... k
1n
k
21
k
22
... k
2n
.
.
.
.
.
.
k
n1
k
n2
... k
nn
_
_
_
_
_
_
(16)
(
X) =
d
2
dt
2
_
_
_
_
_
_
x
1
x
2
.
.
.
x
n
_
_
_
_
_
_
(17)
59
(X) =
_
_
_
_
_
_
x
1
x
2
.
.
.
x
n
_
_
_
_
_
_
. (18)
De manera anal oga al sistema con un grado de libertad, buscamos n fun-
ciones inc ognitas x
j
(t) de la forma
x
j
= A
j
exp(iwt) , (19)
siendo A
j
constantes a determinar. Sustituyendo (19) en (13) y dividiendo
todo entre exp(iwt), se obtiene un sistema de ecuaciones algebraicas lineales
y homogeneas, a las que deben satisfacer A
j
.
j
(w
2
m
ik
+k
ik
)A
k
= 0 . (20)
Para que este sistema tenga soluciones distintas de cero, el determinante de
sus coecientes debe anularse.
k
ij
w
2
m
ij
2
= 0 . (21)
Esta es la ecuaci on caracterstica y es de grado n con respecto a w
2
. En
general, tiene n raices distintas reales y positivas w
( = 1, 2, ..., n). Las
magnitudes w
se llaman frecuencias propias del sistema. Multiplicando por
A
i
y sumando sobre i se tiene
j
(w
2
m
ij
+k
ij
)A
i
A
j
= 0 ,
de donde
w
2
=
k
ij
A
i
A
i
/
m
ij
A
i
A
i
.
Como los coecientes k
ij
y m
ij
son reales y simetricos, las formas cuadraticas
del numerador y denominador de esta expresi on son reales, y al ser esencial-
mente positivas, w
2
es igualmente positivo.
EJEMPLO
Como ejemplo se modelar an las ecuaciones del movimiento del pendulo
doble. La energa potencial para este es (el problema posee dos grados
de libertad)
60
U = m
1
gl
1
(1 cos
1
) +m
2
gl
1
(1 cos
1
) +m
2
gl
2
(1 cos
2
) .
Al aplicar la expancion (8), se tiene
U =
1
2
(m
1
+m
2
)gl
1
2
1
+
1
2
m
2
gl
2
2
2
.
Al comparar con (9), identicamos
k
11
= (m
1
+m
2
)l
2
1
k
12
= k
21
= 0
k
22
= m
2
gl
2
.
Para la energa cinetica se encontr o
T =
1
2
(m
1
+m
2
)l
2
1
.
2
1
+
1
2
m
2
l
2
2
.
2
2
+m
2
l
1
l
2
.
1
.
2
.
Identicando terminos al comparar con (10)
m
11
= (m
1
+m
2
)l
2
1
m
12
= m
21
= m
2
l
1
l
2
m
22
= m
2
l
2
2
.
Al sustituir las ecuaciones de las energas en (11) se obtiene la Lagrangiana
para el oscilador de pendulo doble y como resultado nal:
_
m
11
m
12
m
21
m
22
__
..
1
..
2
_
+
_
k
11
0
0 k
22
__
1
2
_
= 0 .
Estas son las ecuaciones de movimiento en este caso.
4.2 OSCILADOR ARMONICO FORZADO.
Si un sistema oscilatorio se somete a la accion de un campo externo vari-
able, son las llamadas oscilaciones forzadas. Como consideramos peque nas
oscilaciones, entonces esperamos que la accion del campo exterior sea debil.
Ademas de su energa potencial propia, el sistema posee en este caso una en-
erga potencial U
e
(x, t) debida al campo exterior. Desarrollando esta ultima
en serie de potencias de la peque na magnitud x:
61
U
e
(x, t)
= U
e
(0, t) +x
_
U
e
x
_
x=0
.
El segundo termino, es la fueza exterior que act ua sobre el sistema en su
posici on de equilibrio, desisgnado este termino como F(t). Con esto, la
Lagrangiana para este sistema es de la forma
L =
1
2
m
x
2
1
2
kx
2
+xF(t) . (22)
La ecuaci on de movimiento correspondiente es
m
x +kx = F(t) ,
o bien
x +w
2
x = F(t)/m , (23)
donde w es la frecuencia para las oscilaciones libres. La soluci on general a
esta ecuaci on es de la forma
x = x
h
+x
p
,
es decir, de una parte homogenea y una soluci on correspondiente a un caso
particular. Analizando el caso para el cual la fuerza exterior es funcion
peri odica simple del tiempo, de frecuencia de la forma
F(t) = f cos(t +) .
Al hallar la integral particular para la ecuaci on 23 en la forma x
1
= b cos(t+
) y al sustituir, se tiene que b = f/m(w
2
2
), que al juntar ambas
soluciones, tenemos que la soluci on total es
x = a cos(wt +) +
_
f/m(w
2
2
)
_
cos(t +) . (24)
El resultado muestra una suma de dos oscilaciones: una debida a la frecuen-
cia propia y otra con la frecuencia de la fuerza exterior.
La ecuaci on (23) puede ser integrada en forma general para una fuerza ex-
terior arbitraria. Escribiendo la ecuaci on de la forma
d
dt
(
x +iwx) iw(
x +iwx) =
1
m
F(t) ,
62
haciendo =
x +iwx, se tiene
d
dt
iw = F(t)/m .
La soluci on a esta ultima es del tipo = A(t) exp(iwt); para la funcion A(t)
se obtiene
A= F(t) exp(iwt)/m .
Al integrarla se obtiene la soluci on
= exp(iwt)
_
t
0
1
m
F(t) exp(iwt)dt +
o
. (25)
Esta es la soluci on general buscada; la funcion x(t) est a dada por la parte
imaginaria de esta ultima dividiendo por w.
EJEMPLO
Como empleo de la ecuaci on anterior se muestra el siguiente ejemplo.
Determinar la amplitud nal de las oscilaciones de un sistema bajo la accion
de una fuerza exterior tal que F
0
= cte durante un tiempo lmitado T. Para
este intervalo de tiempo se tiene
=
F
0
m
exp(iwt)
_
T
0
exp(iwt)dt
=
F
0
iwm
[1 exp(iwt)] exp(iwt)
y el m odulo cuadrado da la amplitud. De la relaci on [[
2
= a
2
w
2
con lo cual
a =
2F
0
mw
2
sen(
1
2
wT) .
4.3 OSCILADOR ARMONICO AMORTIGUADO.
En las secciones anteriores consideramos s olo la carencia o la presencia de
fuerzas externas, para los casos del oscilador arm onico simple y forzado;
respectivamente. Es decir, el movimiento tena lugar en el vacio o bien, que
la inuencia del medio en el movimiento era despreciable. En la realidad,
cuando un sistema se mueve a traves de un medio, este ofrece resistencia que
tiende a retardar el movimiento. La energa del sistema se disipa (ya sea en
63
forma de calor o de algun otra forma de energa). Primero analizamos como
afecta este fenomeno a las oscilaciones simples.
El modo en que este medio afecta al movimiento es por fuerzas de roza-
miento. Si esta fuerza disipativa es lo sucientemente peque na, podemos
desarrollarla en potencias de la velocidad. El termino de orden cero del de-
sarrollo es nulo, ya que ninguna fuerza de rozamiento act ua sobre un cuerpo
enreposo, por lo que el primer termino que no se anula es proporcional a la
velocidad, adem as despreciando terminos de orden superior.
f
r
=
x ,
donde x es la coordenada generalizada y un coeciente positivo; el signo
menos indica que es en sentido opuesto al movimiento. A nadiendo esta
fuerza a la ecuaci on de movimiento
m
..
x= kx
x ,
o bien
..
x= kx/m
x /m . (26)
Haciendo k/m = w
2
o
y /m = 2; donde w
o
es la frecuencia de las oscila-
ciones libres del sistema y es el coeciente de amortiguamiento. Con lo
anterior
..
x +2
x +w
2
o
x = 0 .
La soluci on para la ecuaci on anterior es de la forma x = exp(rt); al sustituir
esta en la ecuaci on anterior obtenemos la ecuaci on caracterstica para r. De
tal modo
r
2
+ 2 +w
2
o
= 0 ,
de donde
r
1,2
=
_
(
2
w
2
o
) ,
con lo que la soluci on general a la ecuaci on de movimiento es
x = c
1
exp(r
1
t) +c
2
exp(r
2
t) .
De las raices de r podemos considerar los siguientes casos especiales:
64
(i) < w
o
. Se tienen raices imaginarias conjugadas. Con lo que la
soluci on es
x = re
_
Aexp
_
t +i
_
(w
2
o
2
)
__
,
siendo A una constante compleja arbitraria. La soluci on puede ser escrita
en la forma
x = a exp(t) cos(wt +) siendo w =
_
(w
2
o
2
) , (27)
donde a y son constantes reales. De este modo, puede decirse que una
oscilaci on amortiguada es como una oscilaci on arm onica cuya amplitud de-
crece exponenecialmente. La rapidez de disminuci on de la amplitud est a
determinada por el exponente y la frecuencia w es menor que las oscila-
ciones libres en ausencia de rozamiento.
(ii) > w
o
. Entonces los dos valores de r son reales y negativos. La
forma general de la soluci on es:
x = c
1
exp
_
_
_
(
2
w
2
o
)
_
t
_
+c
2
exp
_
_
+
_
(
2
w
2
o
)
_
t
_
.
Si el rozamiento es muy grande, el movimiento consiste en una disminuci on
mon otona, que tiende asintoticamente (cuando t ) a la posici on de
equilibrio (sin oscilaci on). Este tipo de movimiento se llama aperi odico.
(iii) = w
o
. Se tiene que r = , cuya soluci on general es de la forma
x = (c
1
+c
2
t) exp(t) .
Si generalizamos para sistemas con n grados de libertad, las fuerzas de roza-
miento generalizadas correspondientes a las coordenadas x
i
son funciones
lineales de las velocidades
f
r,i
=
ij
.
x
i
, (28)
con
ik
=
ki
se puede escribir como
f
r,i
=
F
.
x
i
,
donde F =
1
2
i,j
ij
.
x
i
.
x
j
y se le llama funcion disipativa. La ecuaci on
diferencial se obtiene al sumar estas fuerzas a la ecuaci on (13 )
65
(m
ij
x
j
+k
ij
x
j
) =
ij
.
x
i
. (29)
Haciendo en estas ecuaciones
x
k
= A
k
exp(rt)
y al sustituir esta ultima en (29) y dividiendo por exp(rt), se tiene el siguiente
sistema de ecuaciones algebraicas lineales para las constantes A
j
j
(m
ij
r
2
+
ij
r +k
ij
)A
j
= 0 .
Igualando a cero el determinante de este sistema, se encuentra la ecuaci on
caracterstica para este sistema.
m
ij
r
2
+
ij
r +k
ij
= 0 . (30)
Esta es una ecuaci on en r de grado 2n.
4.4 MODOS NORMALES.
Antes de denir los modos normales, reescribiremos la ecuaci on (14) de la
siguiente manera
M
..
X
_
+K[X) = 0 ,
donde [X) es el vector n-dimensional cuya matrix de representacion es (18);
M y K son dos operadores que tienen la representacion matricial denidas
por (15) y (16) respectivamente. La ecuaci on antes descrita es una ecuaci on
con operadores. Dado que M es un operador no sigular y simetrico para el
cual el operador inverso M
1
y el operador M
1/2
y M
1/2
exsten. Con lo
anterior podemos expresar la ecuaci on de operadores en la forma
d
2
dt
2
M
1/2
[X) = M
1/2
KM
1/2
M
1/2
[X) ,
o de la forma m as compacta
d
2
dt
2
X
_
=
X
_
, (31)
66
donde
X
_
= M
1/2
[X)
y
= M
1/2
KM
1/2
.
Como M
1/2
y K son operadores simetricos, entonces es igualmente simetrico.
Si empleamos eigenvectores ortogonales como base vectorial (por ejemplo el
espacio tridimencional), la representacion matricial del operador puede ser
diagonal de la forma
ij
=
i
ij
.
Trataremos el siguiente problemas de eigenvalores
[
i
) =
i
[
i
) , (32)
donde [
i
) representa un conjunto de eigenvectores mutuamente ortogonales;
o bien
M
1/2
KM
1/2
[
i
) =
i
[
i
) .
Los eigenvalores son obtenidos al multiplicar ambos lados por
i
[, con lo
cual
i
=
i
[ M
1/2
KM
1/2
[
i
)
i
[
i
)
.
Dado que las energas potencial y cinetica son cantidades positivas, se tine
que
i
[ M
1/2
KM
1/2
[
i
))0
y por lo tanto
i
> 0 .
Esto nos permite el conjunto
i
= w
2
i
.
Si expresamos el vector
X
_
en terminos de estos eigenvectores de ,
67
X
_
=
i
y
i
X
_
,
donde
y
i
=
i
X
_
. (33)
Al insertar este resultado en la ecuaci on de movimiento (31), se tiene
d
2
dt
2
i
y
i
[
i
) =
X
_
=
i
y
i
[
i
) .
El producto escalar de esta ecuaci on con el eigenvector constante
j
[, pro-
duce la ecuaci on de movimiento para las coordenadas generalizadas y
j
d
2
dt
2
y
j
= w
2
j
y
j
.
La soluci on para esta ecuaci on es de la forma
y
j
= A
j
cos(w
j
t +
j
) . (34)
En base a estas nuevas coordenadas para el movimiento arm onico de un sis-
tema de particulas, pueden obtenerse un conjunto de ecuaciones de movimiento
generalizadas e independientes. La relaci on entre estas y
j
s y x
i
s est a dada
por (33)
y
j
=
j1
x
1
+
j2
x
2
+... +
jn
x
n
.
Los componentes
jl
(l = 1, 2, .., n) son determinados al resolver el problema
de eigenvalores de la ecuaci on (32). Las nuevas coordenadas son referidas
como las coordenadas normales, y las w
j
s como las frecuencias normales.
La forma equivalente (34) en matrices es
_
_
_
_
_
_
_
x
(j)
1
x
(j)
2
.
.
.
x
(j)
n
_
_
_
_
_
_
_
= A
j
cos(w
j
t +
j
)
_
_
_
_
_
_
j1
j2
.
.
.
jn
_
_
_
_
_
_
. (35)
Esta ultima reere los modos normales de vibracion del sistema. Una de las
razones de haber introducido coordenadas y
j
s se aprecia al observar que la
68
expresi on para la energa cinetica no cambia si se rotaran los ejes del nuevo
sistema no cambian
T =
1
2
n
j=1
M
j
.
y
2
j
.
EJEMPLO
Suponiendo un arreglo matricial de la forma mostrada, la cual representa
las ecuaciones de movimiento obtenidas para un sistema
d
2
dt
2
_
_
_
x
1
x
2
x
3
_
_
_ =
_
_
_
5 0 1
0 2 0
1 0 5
_
_
_
_
_
_
x
1
x
2
x
3
_
_
_ .
Comparando con (31), identicamos el valor del operador . Al encontrar
los egienvectores empleamos (32) con lo cual
_
_
_
5 0 1
0 2 0
1 0 5
_
_
_
_
_
_
3
_
_
_ =
i
_
_
_
3
_
_
_ .
Determinamos la ecuaci on caracterstica para las
i
. De manera que
det(
i
I) = 0 ,
al sustituir valores
5 0 1
0 2 0
1 0 5
= 0 .
Al resolver la ecuaci on se tiene que
i
= 2, 4, 6. Para = 4
_
_
_
5 0 1
0 2 0
1 0 5
_
_
_
_
_
_
3
_
_
_ = 4
_
_
_
3
_
_
_
se tiene el siguiente conjunto de ecuaciones
69
(5 4)
1
+
3
= 0
2
2
4
2
= 0
1
+ (5 4)
3
= 0 .
Teniendo en cuenta la condici on de normalizacion, se obtienen los valores
1
=
3
=
1
2
= 0 .
Con lo anterior
[
=4
) =
1
2
_
_
_
1
0
1
_
_
_ .
De igual modo se obtienen
[
=6
) =
1
2
_
_
_
1
0
1
_
_
_
[
=2
) =
_
_
_
0
1
0
_
_
_ .
As, el nuevo espacio vectorial est a determinado por
[
i
) =
_
_
_
1
2
1
2
0
0 0 1
2
1
2
0
_
_
_ ,
de donde
i
[ =
_
_
_
1
2
0
1
2
1
2
0
1
2
0 1 0
_
_
_ .
As, las coordenadas normales son dadas por (33)
_
_
_
y
1
y
2
y
3
_
_
_ =
_
_
_
1
2
0
1
2
1
2
0
1
2
0 1 0
_
_
_
_
_
_
x
1
x
2
x
3
_
_
_ .
70
4.5 RESONANCIA PARAMETRICA.
El importante fenomeno de resonancia parametrica se presenta al tener un
sistema que se se encuentra en un estado de reposo (en la posici on de equi-
librio x = 0) y es inestable; es decir, bastara una separacion de esta posici on
por peque na que sea para provocar un desplazamiento x r apidamente cre-
ciente con el tiempo. Se diferencia de las resonancias ordinarias, en las cuales
el desplazamiento crece con el tiempo (proporcional a t).
Los par ametros de un sistema lineal son los coecientes m y k de la La-
grangiana (3); si estos son funcion del tiempo, la ecuaci on del movimiento
es:
d
dt
(m
x) +kx = 0 . (36)
Si consideramos la masa constante, la ecuaci on anterior toma la forma
d
2
x
dt
2
+w
2
(t)x = 0 . (37)
La forma de la funcion w(t) est a dada por las condiciones del problema;
suponiendo que la funcion es peri odica de frecuencia (y de periodo T =
2/). Lo que signica
w(t +T) = w(t) ,
por lo cual, toda ecuaci on del tipo (37) es invariante con respecto a la trans-
formacion t t+T. As, si x(t) es una soluci on de esta, la funcion x(t+T) es
tambien soluci on. Con lo anterior, sean x
1
(t) y x
2
(t) dos integrales indepen-
dientes de (37), estas deben transformarse en ellas mismas en combinaci on
lineal cuando se sustituye t t +T. La forma de ello es
x
1
(t +T) =
1
x(t) (38)
x
2
(t +T) =
2
x(t) ,
o en forma general
x
1
(t) =
t/T
1
F(t)
x
2
(t) =
t/T
2
G(t) ,
71
donde F(t) y G(t) son funciones puramente periodicas del tiempo (de perodo
T). La relaci on entre estas constantes se obtiene al manipular las ecuaciones
siguientes
..
x
1
+w
2
(t)x
1
= 0
..
x
2
+w
2
(t)x
2
= 0 .
Multiplicando por x
2
y x
1
respectivamente, y rest andolas miembro a miem-
bro, se obtiene
..
x
1
x
2
..
x
2
x
1
=
d
dt
(
.
x
1
x
2
.
x
2
x
1
) = 0 ,
o tambien
.
x
1
x
2
.
x
2
x
1
= cte .
Al sustituir t por t + T en la ecuaci on anterior, el miembro derecho est a
multiplicado por
1
2
(debido a 38); por lo que es evidente que
2
= 1 , (39)
teniendo en cuenta (37) y sabiendo que los coecientes son reales. Si x(t) es
una integral de esta ecuaci on, la funcion x (t) tambien lo es. Lo anterior
conduce a que
1
,
2
deben coincidir con
1
,
2
, es decir, o
1
=
2
o tambien
1
y
2
son reales. En el primer caso y teniendo en cuenta (39) resulta que
1
= 1/
1
lo que es igual [
1
[
2
= [
2
[
2
= 1. En el segundo caso, las dos
integrales son de la forma
x
1
(t) =
t/T
F(t)
x
2
(t) =
t/T
G(t) .
Una de estas funciones crece exponencialmente con el tiempo.
BIBLIOGRAFIA.
* H. Goldstein, Classical mechanics, Second ed. (Addison-Wesley, 1981).
* L. D. Landau & E. M. Lifshitz, Mec anica, (Reverte, 1969).
* W. Hauser, Introduction to the principles of mechanics, (Wesley, 1965).
* E.I. Butikov, Parametric Resonance, Computing in Science &
Engineering, May/June 1999, pp. 76-83 (http://computer.org).
72
5. TRANSFORMACIONES CANONICAS
Prologo: La idea principal de las transformaciones can onicas es encontrar
todos aquellos sistemas de coordenas (en el espacio de fases) los cuales pre-
serven la forma de las ecuaciones de Hamilton, independientemente de que
Hamiltoniano se trate. Posteriormente se escoge de entre todos esos sis-
temas de coordenadas aquel en el cual se facilite la resolucion del problema
en particular.
CONTENIDO:
5.1 Deniciones, Hamiltoniano y Kamiltoniano
5.2 Condiciones necesarias y sucientes para que una transf. sea can onica
5.3 Ejemplo de aplicaci on de transf. can onica
73
5.1 Deniciones, Hamiltoniano y Kamiltoniano
Se dene una transformacion can onica, considerando los casos en que la
transformacion depende explicitamente (o no) del tiempo, de la siguiente
manera:
Denicion 1: Una transformacion independiente del tiempo Q = Q(q, p),
y P = P(q, p) se dice que es can onica si y solo si existe una funcion F(q, p)
tal que
dF(q, p) =
i
p
i
dq
i
i
P
i
(q, p)dQ
i
(q, p) .
Denicion 2: Una transformacion dependiente del tiempo Q = Q(q, p, t), y
P = P(q, p, t) se dice que es can onica si y solo si existe una funcion F(q, p, t)
tal que para un tiempo arbitrario jo t = t
0
dF(p, q, t
0
) =
i
p
i
dq
i
i
P
i
(q, p, t
0
)dQ
i
(p, q, t
0
) ,
donde
dF(p, q, t
0
) =
i
F(p, q, t
0
)
q
i
dq
i
+
i
F(p, q, t
0
)
p
i
dp
i
y
dQ(p, q, t
0
) =
i
Q(p, q, t
0
)
q
i
dq
i
+
i
Q(p, q, t
0
)
p
i
dp
i
Ejemplo: Demostrar que la siguiente transformacion es can onica:
P =
1
2
(p
2
+q
2
)
Q = Tan
1
_
q
p
_
.
Soluci on: De acuerdo a la denicion 1, debemos vericar que pdq PdQ
es una diferencial exacta. Sustituyendo P y Q de la transformacion dada en
el problema obtenemos:
pdq PdQ = pdq
1
2
(p
2
+q
2
)
pdq qdq
p
2
+q
2
= d
_
pq
2
_
.
De lo anterior concluimos que efectivamente, la transformacion dada en el
problema es can onica. Sabemos que un sistema din amico se encuentra car-
acterizado por su Hamiltoniano H = H(q, p, t), en donde q = q(q
1
, q
2
, ..., q
n
),
74
y p = p(p
1
, p
2
, ..., p
n
), y que por tanto el sistema tiene asociado un conjunto
de 2n ecuaciones diferenciales de primer orden, dadas por las ecuaciones de
Hamilton:
q
i
=
H
p
i
(1)
p
i
=
H
q
i
. (2)
Sean las transformaciones de coordenadas en el espacio de fase, denotadas
como
Q
j
= Q
j
(q, p, t) (3)
P
j
= P
j
(q, p, t) , (4)
entonces, de acuerdo a lo dicho al principio, denotaremos como transforma-
ciones can onicas al conjunto de transformaciones de la forma de (3) y (4)
para las cuales, an alogamente a (1) y (2), exista una funci on K = K(Q, P, t)
tales que podamos escribir
Q
i
=
K
P
i
(5)
P
i
=
K
Q
i
. (6)
La relaci on existente entre el Hamiltoniano H y el nuevo Kamiltoniano K
1
se puede obtener a partir de las siguientes consideraciones
2
.
De acuerdo al principio de Hamilton, la trayectoria real que un sistema
clasico describira se puede obtener a partir de variaci on de la integral de
accion dada por
_
(
i
p
i
dq
i
Hdt) = 0 . (7)
Si la transformacion es can onica, entonces el nuevo Kamiltoniano K debe
tambien cumplir una relaci on similar a (7), es decir, con el nuevo conjunto
1
Aqui seguiremos la misma terminologia empleada por Goldstein al referirse a la nueva
funcion K = K(Q, P, t), la cual diere del Hamiltoniano H = H(p, q, t) por una derivada
temporal aditiva, como la Kamiltoniana.
2
Una derivacion alternativa a la presente ha sido dada por G. S. S. Ludford and D. W.
Yannitell, Am. J. Phys. 36, 231 (1968).
75
de coordenadas Q y P tambien es valido que
_
(
i
P
i
dQ
i
Kdt) = 0 . (8)
Sabemos adem as que, de acuerdo a la transformacion de Legendre,
i
p
i
dq
i
Hdt = L(q, q, t)dt, por lo que (7) -lo mismo que (8)- equivale a
_
t
2
t
1
L(q, q, t)dt = 0 (9)
y que (9) no se altera si L es sustituido por L = L +
dF(q,t)
dt
porque en este
caso,
_
t
2
t
1
Ldt =
_
t
2
t
1
(L +
dF(q, t)
dt
)dt , (10)
o en forma equivalente
_
t
2
t
1
Ldt =
_
t
2
t
1
L(q, q, t)dt +F(q
(2)
, t
2
) F(q
(1)
, t
1
) (11)
, por lo que (10) y (11) dieren solamente por terminos constantes los cuales
dan como resultado una variaci on nula al momento de aplicar el principio
de Hamilton.
De acuerdo a lo anterior podemos exigir que el Hamiltoniano H y el Kamil-
toniano K se encuentren relacionados por la ecuaci on
3
p
i
q
i
H = P
i
Q
i
K +
dF
dt
. (12)
La funcion F es llamada funcion generadora. Esta puede ser expresada
como una funcion de cualquier conjunto arbitrario de variables independi-
entes. Sin embargo, algunos resultados muy convenientes son obtenidos si F
es expresada como funcion de las n viejas variables y las n nuevas variables,
m as el tiempo. Los resultados son especialmente convenientes si las n viejas
variables son en su totalidad las n q
i
- o las n p
i
-, y si las nuevas variables
son en su totalidad las n Q
i
- o las n P
i
.
3
Algunos autores agregan al lado derecho de esta ecuacion un factor multiplicativo con-
stante A ya que en este caso tampoco se ve alterado (1.9). Nosotros escogimos arbitraria-
mente A = 1, es decir, decidimos trabajar con transformaciones canonicas restringidas, ya
que este caso es suciente para mostrar la estructura de las transformaciones canonicas.
76
Atendiendo a lo dicho en el p arrafo anterior, las posibles combinaciones
de n variables viejas y n variables nuevas -incluyendo a t- en la funcion
generadora son:
4
F
1
= F
1
(Q, q, t) (13)
F
2
= F
2
(P, q, t)
F
3
= F
3
(Q, p, t)
F
4
= F
4
(P, p, t) .
Por otro lado, si multiplicamos (1.12) por dt obtenemos:
p
i
dq
i
Hdt = PdQ
i
Kdt +dF . (14)
Y haciendo el cambio F F
1
en la relaci on anterior, y recordando que dQ
i
,
dq
i
, y dt son variables independientes, obtenemos:
P
i
=
F
1
Q
i
p
i
=
F
1
q
i
K = H +
F
1
t
.
Mediante manipuleos algebraicos es posible obtener expresiones an alogas a la
anterior que involucren a las restantes funciones generadores. Los resultados
que se obtienen se muestran a continuaci on:
F
2
: Q
i
=
F
2
P
i
p
i
=
F
2
q
i
K = H +
F
2
t
F
3
: P
i
=
F
3
Q
i
q
i
=
F
3
p
i
K = H +
F
3
t
F
4
: Q
i
=
F
4
P
i
q
i
=
F
4
p
i
K = H +
F
4
t
.
En la practica resulta util el siguiente teorema, el cual permite, junto con
las deniciones dadas en la introducci on para que una transformacion sea
can onica (ya sea que la transforamacion dependa o no explcitamente del
tiempo), resolver cualquier problema mec anico de interes
5
.
4
Usaremos la misma convencion de Goldstein para denotar cada una de las diferentes
combinaciones de las variables nuevas y viejas en la funcion generadora.
5
Para un ejemplo, ver la seccion nal de este captulo.
77
Teorema 1.1.: Consideremos un sistema sobre el cual se ejerce una fuerza
neta dada. Supongamos adem as que el estado din amico del sistema est a
denido por un conjunto de variables q, p = q
1
, q
2
, ..., q
n
, p
1
, p
2
, ..., p
n
y que
el Hamiltoniano del sistema es H = H(q, p, t) tal que el comportamiento de
las variables q y p este determinado por las ecuaciones de Hamilton
q
i
=
H(q, p, t)
p
i
p
i
=
H(q, p, t)
q
i
.
Si nosotros hacemos una transformacion a las nuevas variables
Q = Q(q, p, t) ; P = P(q, p, t)
y si la transformacion es can onica, es decir, si existe una funcion F(q, p, t)
tal que para un tiempo arbitrario jo t = t
0
,
dF(q, p, t
0
) =
i
y
i
dx
i
i
Y
i
dX
i
,
donde x
i
, y
i
= q
i
, p
i
o p
i
, q
i
y X
i
, Y
i
= Q
i
, P
i
, o P
i
, Q
i
, entonces las
ecuaciones de movimiento en terminos de las variables Q y P son
Q
i
=
K(Q, P, t)
P
i
P
i
=
K(Q, P, t)
Q
i
,
donde
K H +
F(q, p, t)
t
+
i
Y
i
X
i
(q, p, t)
t
.
Ademas si el determinante de la matriz [
X
i
y
j
] es distinto de cero, entonces
la ecuaci on anterior se reduce a
K H +
F(x, X, t)
t
.
5.2 Condiciones necesarias y sucientes para que
una transformacion sea canonica
Hemos mencionado al principio que por transformacion can onica entender-
emos aquella transformacion que, independientemente de cual sea la forma
78
del Hamiltoniano, preserva la forma de las ecuaciones de Hamilton. Se debe
ser muy cuidadoso respecto a este punto ya que es posible que existan trans-
formaciones que preservan la forma de las ecuaciones de Hamilton, pero para
un Hamiltoniano particular
6
. Algunos autores le denominan a este tipo de
transformacion transformacion canonica respecto a H
7
.
Para ilustrar este punto utilizaremos el siguiente ejemplo, sugerido en el
artculo de J. Hurley: Consideremos un sistema fsico particular cuyo Hamil-
toniano sea
H =
p
2
2m
(15)
y consideremos las transformaciones
P = p
2
Q = q .
(16)
Es facil demostrar que el Kamiltoniano K dado por
K =
2P
3/2
3m
conduce a
P = 2p p = 0 =
K
Q
y
Q = q =
p
m
=
P
1/2
m
=
K
P
. (17)
Por otro lado, si escogemos el Hamiltoniano
H =
p
2
2m
+q
2
,
entonces es imposible encontrar un Kamiltoniano K tal que al usar las ecua-
ciones de transformacion (16) se preserve la forma de las ecuaciones de
Hamilton. Como vemos, en el anterior ejemplo las ecuaciones (16) preser-
van la forma de las ecuaciones de Hamilton, pero para un Hamiltoniano en
particular.
6
Ver por ejemplo, J. Hurley, Am. J. Phys. 40, 533 (1972).
7
Ver por ejemplo, R. A. Matzner y L. C. Shepley, Classical Mechanics (Prentice Hall,
1991).
79
Se puede demostrar que las condiciones necesarias y sucientes para que
transformaciones de la forma (3) y (4) sean can onicas, es decir, que preser-
ven la forma de las ecuaciones de Hamilton independientemente del Hamil-
toniano que se considere, son:
[Q
i
, P
j
] = (18)
[P
i
, P
j
] = 0 (19)
[Q
i
, Q
j
] = 0 , (20)
en donde es una constante cualquiera, relacionada con cambios de es-
cala. Algunos comentarios merecen ser mencionados antes de nalizar esta
secci on. En primer lugar, debemos mantener en mente que Q y P no con-
stituyen variables que denan la conguraci on del sistema, es decir, no con-
stituyen en general un conjunto de coordenadas generalizadas
8
. Para dis-
tinguir a Q y P, de las coordenadas generalizadas q y p, se les denomina
variables can onicas. Y a las ecuaciones de movimiento -similares en forma
a las ecuaciones de Hamilton para las coordenadas generalizas q y p- que
se obtienen para Q y P se les denomina ecuaciones can onicas de Hamil-
ton. En segundo lugar, aunque no lo probamos aqu, si la transformacion
Q = Q(q, p, t) y P = P(q, p, t) es can onica, entonces la transformacion in-
versa q = q(Q, P, t) y p = p(Q, P, t) es tambien can onica
9
.
5.3 Ejemplo de aplicacion de TC
Como se menciono en la introducci on a este captulo, la idea principal de
realizar una transformacion can onica es encontrar sistemas de coordenadas
(en el espacio de fases) los cuales preserven la forma de las ecuaciones de
Hamilton, independientemente de la forma del Hamiltoniano, y escoger de
entre todas ellos, aquel que facilite la resoluci on del problema en particular.
Vamos a ilustrar este punto con un ejemplo.
EJEMPLO:
El Hamiltoniano de cierto sistema fsico esta dado por H =
2
p(q + t)
2
,
donde es una constante. Determine q como una funcion del tiempo.
Soluci on:
8
Salvo el caso trivial en que la transformacion canonica sea Q = q y P = p.
9
Para una demostracion sobre este punto, ver por ejemplo, E. A. Desloge, Classical
Mechanics, Volume 2 (John Wiley & Sons, 1982).
80
1. Resolviendo las ecuaciones de Hamilton para las variables q y p. Al
aplicar las ecuaciones de Hamilton (1) y (2) al Hamiltoniano dado en este
problema, se obtiene
2
(q +t)
2
= q, 2
2
p(q +t) = p .
Este sistema no es de soluci on facil. Sin embargo, este problema se puede
resolver facilmente con una adecuada transformacion can onica, tal como se
muestra a continuaci on.
2. Haciendo uso de la transformaci on can onica Q = q + t, P = p. De
acuerdo al teorema dado en la secci on (1.1), puesto que
Q
p
= 0
P
(q)
= 0 ,
entonces el Kamiltoniano K del sistema est a dado por
K = H +
F(q, p, t)
t
+P
Q
t
Q
P
t
. (21)
La forma de la funcion F(q, p, t) la encontramos a partir de la denicion de
transformacion can onica dada en la secci on 1 -este caso corresponde a una
transformacion can onica dependiente explcitamente del tiempo-. Es decir,
a partir de
dF(q, p, t) = pdq PdQ .
Y sustituyendo Q = q + t, P = p en la relaci on anterior se obtiene sin
ninguna dicultad que
F(q, p, t) = c, c= constante .
Por otro lado
P
t
= 0
Q
t
= 1 .
Finalmente, sustituyendo estos resultados (y sustituyendo Q = q +t, P = p
en el Hamiltoniano H) en (21) obtenemos
K = P(
2
Q
2
+ 1)
81
Y de (5) obtenemos
Q =
2
Q
2
+ 1 .
Esta ecuaci on diferencial se resuelve facilmente, y se obtiene como resultado
nal
q =
1
tan(t +) t ,
en donde es una fase arbitraria. Como se puede observar, la correcta
eleccion de la transformacion can onica puede facilitar la soluci on de cualquier
problema mec anico.
82
6. PARENTESIS DE POISSON
Prologo: Los parentesis de Poisson son herramientas analticas muy utiles
para estudiar el comportamiento de cualquier sistema din amico. Nosotros
deniremos en este captulo lo que se entiende por parentesis de Poisson;
daremos algunas de sus propiedades, y nalmente presentaremos algunas
aplicaciones de los mismos en el estudio de sistemas din amicos.
CONTENIDO:
1. Denici on y propriedades
2. Formulaci on de Poisson para las ecs. de movimiento
3. Las constantes de movimiento en la formulaci on de Poisson
83
1. Denicion y propiedades de los parentesis de Poisson
Si u y v son cualesquiera dos cantidades que dependen del estado din amico
del sistema (es decir, de p y de q) y posiblemente del tiempo, el parentesis
de Poisson de u y v con respecto a un conjunto de variables can onicas q y p
10
es denido como
[u, v]
i
_
u(q, p, t)
q
i
v(q, p, t)
p
i
u(q, p, t)
p
i
v(q, p, t)
q
i
_
. (1)
Los parentesis de Poisson tienen las siguientes propiedades (donde u, v, y w
son funciones arbitrarias de q, p, y de t; a es una constante arbitraria, y r
es cualquiera de las variables q
i
, p
i
o t)
11
:
Propiedad 1. [u, v] [v, u]
Propiedad 2. [u, u] 0
Propiedad 3. [u, v +w] [u, v] + [u, w]
Propiedad 4. [u, vw] v[u, w] + [u, v]w
Propiedad 5. a[u, v] [au, v] [u, av]
Propiedad 6.
[u,v]
r
[
u
r
, v] + [u,
v
r
]
Propiedad 7. Identidad de Jacobi, [u, [v, w]]+[v, [w, u]]+[w, [u, v]] 0 .
Otra propiedad muy importante de los parentesis de Poisson es enunciada
en el siguiente teorema:
Teorema 6.1 Si la transformacion Q = Q(q, p, t), P = P(q, p, t) es una
transformacion can onica, el parentesis de Poisson de dos cantidades u y v
con respecto al conjunto de variables q, p, es igual al parentesis de Poisson
de u y v con respecto al conjunto de variables Q, P, es decir
i
_
u(q, p, t)
q
i
v(q, p, t)
p
i
u(q, p, t)
p
i
v(q, p, t)
q
i
_
=
10
Como en el captulo anterior, entendemos a q y p como q = q1, q2, ..., qn y p =
p1, p2, ..., pn.
11
La prueba de estas propiedades se logra utilizando la denicion de los parentesis de
Poisson para expresar cada uno de los terminos de estas identidades en terminos de las
derivadas parciales de u, v, y w, y notando por inspeccion la valides de las ecuaciones
resultantes.
84
i
_
u(q, p, t)
Q
i
v(q, p, t)
P
i
u(q, p, t)
P
i
v(q, p, t)
Q
i
_
.
2. La formulacion de Poisson para las ecuaciones de movimiento
Resumimos a continuaci on, en forma de teoremas, los resultados m as im-
portantes sobre los parentesis de Poisson en el an alisis de el movimiento de
cualquier sistema din amico
12
:
Teorema 6.2: Consideremos un sistema cuyo estado din amico est a denido
por las variables can onicas q, p y cuyo comportamiento din amico est a denido
por la Hamiltoniana H = H(q, p, t). Sea F una cantidad arbitraria que de-
pende del estado din amico del sistema (es decir, de q, p, y posiblemente t).
La raz on de cambio en el tiempo de F est a dada por
F = [F, H] +
F(q, p, t)
t
,
donde [F, H] es el parentesis de Poisson de F con H.
Teorema 6.3 (Formulacion de Poisson de las ecs. de movimiento).
Consideremos un sistema cuyo estado din amico est a denido por las vari-
ables can onicas q, p, y cuyo comportamiento din amico est a dado por la
Hamiltoniana H = H(q, p, t). El movimiento del sistema est a gobernado
por las ecuaciones
q
i
= [q
i
, H]
p
i
= [p
I
, H] .
3. Las constantes de movimiento en la formulacion de Poisson
Nuevamente enunciaremos los resultados m as importantes sobre la formu-
lacion de Poisson de las constantes de movimiento, en forma de teoremas.
Estos son los siguientes:
Teorema 6.4 Si una cantidad din amica F no es una funcion explcita de el
tiempo, y si el parentesis de Poisson de F con H es nulo, es decir, [F, H] = 0,
entonces F es una constante del movimiento.
Corolario 6.4.a Si el Hamiltoniano no es una funcion explcita del tiempo,
entonces es una constante de movimiento.
12
Las demostraciones han sido omitidas por ser muy conocidas. Ver por ejemplo, E.
A. Desloge, Classical Mechanics, Volume 2 (John Wiley & Sons, 1982).
85
7. LAS ECUACIONES DE HAMILTON-JACOBI
Prologo: Sabemos de los captulos anteriores que podemos, en principio,
disminuir la complejidad de cualquier problema de din amica escogiendo una
adecuada transformacion can onica. En particular, podemos tratar de buscar
aquellas transformaciones can onicas que hagan que el Kamiltoniano K sea
nulo, lo que da las ecs. de Hamilton-Jacobi.
CONTENIDO:
7.1 Introducci on
7.2 Ec. de Hamilton-Jacobi dependiente del tiempo
7.3 Ec. de Hamilton-Jacobi independiente del tiempo
7.4 Generalizacion de la ec. de Hamilton-Jacobi
7.5 Ejemplo de aplicacion de la ec. de Hamilton-Jacobi
86
7.1 Introduccion.
Para lograr nuestros propositos en este captulo, necesitamos hacer uso del
siguiente resultado, el cual nos permite encontrar el conjunto de variables
can onicas que hacen que el Kamiltoniano asuma una forma particular.
Teorema 7.1. Consideremos un sistema cuyo estado din amico est a denido
por las variables p, q y cuyo comportamiento bajo la accion de una fuerza
dada est a dado por la Hamiltoniana H = H(q, p, t). Sea K = K(Q, P, t)
una funci on conocida de las variables can onicas Q, P, y tambien del tiempo.
Entonces cualquier funcion F(q, Q, t) que satisfaga la ecuaci on diferencial
parcial
K
_
Q,
F(q, Q, t)
Q
, t
_
= H
_
q,
F(q, Q, t)
q
, t
_
+
F(q, Q, t)
t
y tambien satisface la condici on
2
F(q, Q, t)
q
j
Q
j
,= 0
es una funcion generadora para una transformacion can onica de las variables
q, p a las variables Q, P, y la correspondiente Kamiltoniana es justamente
K = K(Q, P, t).
En las siguientes secciones haremos uso del anterior problema para encontrar
aquellas transformaciones can onicas cuyo kamiltoniano sea nulo
13
; esto nos
conducira a las ecuaciones de Hamilton-Jacobi.
7.2 Ecuacion de HJ dependiente del tiempo.
Como una consecuencia del Teorema 7.1 y de exigir que el Kamiltoniano K
sea nulo, obtenemos el siguiente teorema:
Teorema 7.2. Consideremos un sistema de f grados de libertad cuyo estado
din amico este denido por el conjunto de variables q, p y cuyo Hamiltoniano
sea H = H(q, p, t). Si construimos la ecuaci on diferencial parcial
H
_
q,
S(q, t)
q
, t
_
+
S(q, t)
t
= 0 (1)
13
Es decir, K
_
Q,
F(q,Q,t)
Q
, t
= 0.
87
y si encontramos una soluci on a esta ecuaci on de la forma
S = S(q, , t) ,
donde =
1
,
2
, ...,
f
es un conjunto de constantes, y si la soluci on satis-
face la condici on
2
S(q, , t)
q
i
,= 0 ,
entonces q(t) puede ser obtenido de las ecuaciones
S(q, , t)
i
=
i
, (2)
donde =
1
,
2
, ...,
f
es un conjunto de constantes. El conjunto de ecua-
ciones (2) nos proporciona f ecuaciones algebraicas en las f variables de-
sconocidas q
1
, q
2
, ..., q
f
. Los valores de las constantes y son determinados
por las condiciones de frontera. Ademas es posible, dada q(t), encontrar p(t)
a partir de la relaci on
p
i
=
S(q, , t)
q
i
. (3)
A la ecuaci on diferencial parcial (1) se le denomina ecuaci on de Hamilton-
Jacobi dependiente del tiempo. Y a la funcion S(q, , t) se le denomina
funci on principal de Hamilton.
Para lograr una mayor comprension de este teorema, as como del signi-
cado de las constantes y , procedemos a continuaci on a desarrollar su
demostracion.
Demostracion del Teorema 7.2. De acuerdo al Teorema 7.1, cualquier
funcion F(q, Q, t) que satisface la ecuaci on diferencial parcial
H
_
q,
F(q, Q, t)
q
, t
_
+
F(q, Q, t)
t
= 0
y tambien satisface la condici on
2
F(q, Q, t)
q
j
Q
j
,= 0
deber a ser una funcion generadora para una transformaci on can onica a un
conjunto de variables can ononicas Q, P para las cuales el Kamiltoniano K
sea nulo, es decir K(Q, P, t) = 0. La funcion
F(q, Q, t) = [S(q, , t)]
=Q
S(q, Q, t)
88
es tal funcion. Entonces S(q, Q, t) es la funcion generadora para una trans-
formacion can onica que lleva al nuevo conjunto de variables Q, P, para las
cuales el Kamiltoniano K es identicamente igual a cero. Las ecuaciones de
transformacion asociadas con la funcion generadora S(q, Q, t) est an denidas
por las ecuaciones
p
i
=
S(q, Q, t)
q
i
(4)
P
i
=
S(q, Q, t)
Q
i
(5)
y como K(Q, P, t) 0, las ecuaciones de movimiento son
Q
i
=
K(Q,P,t)
P
i
= 0
P
i
=
K(Q,P,t)
Q
i
= 0
.
De las anteriores ecuaciones inferimos que
Q
i
=
i
(6)
P
i
= , (7)
donde
i
y
i
son constantes. La eleccion el signo negativo para en
la ecuaci on (7) se hizo por mera conveniencia. Si ahora sustituimos las
ecuaciones (6) y (7) en la ecuaci on (5) obtenemos
i
=
_
S(q, Q, t)
Q
i
_
Q=
=
S(q, , t)
i
,
la cual se reduce a (2). Si adem as sustituimos (6) en (4) obtenemos (2).
Esto completa la prueba.
7.3 Ecuacion HJ independiente del tiempo.
Si la funcion Hamiltoniana no depende explcitamente del tiempo, nosotros
podemos parcialmente resolver la ecuaci on de Hamilton-Jacobi dependiente
del tiempo. Este resultado se enuncia en el siguiente teorema:
Teorema 7.3. Consideremos un sistema de f grados de libertad cuyo es-
tado din amico est a denido por el conjunto de variables q, p, y cuyo compor-
tamiento bajo la accion de una fuerza denido por la funcion Hamiltoniana
independiente del tiempo H(q, p).
89
Si construimos la ecuaci on diferencial parcial
H
_
q,
W(q)
q
_
= E , (8)
donde E es una constante cuyo valor para un conjunto particular de condi-
ciones es igual al valor de la constante de movimiento H(q, p) para las condi-
ciones de frontera dadas, y si nosotros podemos encontrar una soluci on a
esta ecuaci on, de la forma
W = W(q, ) ,
donde
1
,
2
, ...,
f
es un conjunto de constantes que explcita o implcitamente
incluye a la constante E, es decir, E = E(), y si la soluci on satisface la
condici on
2
W(q, )
q
i
,= 0 ,
entonces las ecuaciones de movimiento est an dadas por
S(q, , t)
i
=
i
(9)
donde
S(q, , t) W(q, ) E()t
y =
1
,
2
, ...,
f
es un conjunto de constantes. El conjunto de ecuaciones
(9) proporciona f ecuaciones algebraicas en las f variables desconocidas
q
1
, q
2
, ..., q
f
. Los valores de las constantes y son determinados por las
condiciones de frontera. La ecuaci on diferencial parcial (8) recibe el nombre
de ecuaci on de Hamilton-Jacobi independiente del tiempo, y a la funcion
W(q, ) se le conoce como funci on caracterstica de Hamilton.
7.4 Generalizacion de la ecuacion de HJ.
La ecuaci on de Hamilton-Jacobi puede ser generalizada como se establece
en el siguiente teorema, el cual permite, algunas veces, el simplicar algunos
problemas de Hamilton-Jacobi.
Teorema 7.4. Consideremos un sistema de f grados de libertad cuyo estado
din amico est a denido por un conjunto de varibles x, y, donde x
i
, y
i
= q
i
, p
i
o p
i
, q
i
, y cuyo comportamiento bajo la accion de una fuerza dada est a
90
dado por la Hamiltoniana H(x, y, t). Si construimos la ecuaci on diferencial
parcial
H
_
x,
S(x, t)
x
, t
_
+
S(x, t)
t
= 0
y si podemos encontrar una soluci on a esta ecuaci on de la forma
S = S(x, , t)
donde
1
,
2
, ...,
f
es un conjunto de constantes, y si la soluci on satis-
face la condici on
2
S(x, , t)
x
j
,= 0
entonces el movimiento del sistema puede ser obtenido de las ecuaciones
S(x, , t)
x
i
= y
i
(10)
S(x, , t)
i
=
i
(11)
donde
1
,
2
, ...,
f
es un conjunto de constantes.
En la siguiente secci on mostraremos algunos ejemplos donde hacemos uso
de todos los resultados obtenidos hasta aqu en este captulo.
7.5 Ejemplo de aplicacion de la ecuacion de HJ
Vamos a resolver el problema del oscilador arm onico unidimensional de masa
m, utilizando el metodo de Hamilton-Jacobi.
Sabemos que la Hamiltoniana del sistema es
H =
p
2
2m
+
kx
2
2
(12)
De acuerdo al Teorema 7.2 la ecuaci on de Hamilton-Jacobi para el sistema
es
1
2m
_
F
q
_
+
kq
2
2
+
F
t
= 0 (13)
Supongamos una soluci on a (13) de la forma F = F
1
(q) + F
2
(t). Por lo
tanto, (13) se convierte en
1
2m
_
dF
1
dq
_
2
+
kq
2
2
=
dF
2
dt
(14)
91
Haciendo cada lado de la ecuaci on anterior igual a , encontramos
1
2m
_
dF
1
dq
_
2
+
kq
2
2
= (15)
dF
2
dt
= (16)
Omitiendo las constantes de integraci on, las soluciones son
F
1
=
_
2m(
kq
2
2
)dq (17)
F
2
= t (18)
Por tanto, la funcion generadora F es
F =
_
2m(
kq
2
2
)dq t (19)
Y de acuerdo a (2), q(t) se obtiene a partir de
=
_
_
_
_
2m(
kq
2
2
)dq t
_
_
_
(20)
=
2m
2
_
dq
_
kq
2
2
t (21)
Y realizando la integral obtenemos que
_
m
k
sen
1
(q
_
k/2) = t + (22)
Y despejando q obtenemos nalmente que
q =
_
2
k
sen
_
k/m(t +) . (23)
Podemos adem as dar una interpretacion fsica a la constante siguiendo el
siguiente razonamiento:
El factor
_
2
k
debe corresponder justamente a la m axima amplitud A que
el oscilador puede tener. Por otro lado, la energa total E de un oscilador
arm onico undimensional de amplitud A est a dada por
E =
1
2
kA
2
=
1
2
k
_
_
2
k
_
2
= .
92
Es decir, es fsicamente igual a la energa total E del oscilador arm onico
unidimensional.
BIBLIOGRAFIA COMPLEMENTARIA
C.C. Yan, Simplied derivation of the HJ eq., Am. J. Phys. 52, 555 (1984)
N. Anderson & A.M. Arthurs, Note on a HJ approach to the rocket pb., Eur.
J. Phys. 18, 404 (1997)
M.A. Peterson, Analogy between thermodynamics and mechanics, Am. J.
Phys. 47, 488 (1979)
Y. Hosotani & R. Nakayama, The HJ eqs for strings and p-branes, hep-
th/9903193 (1999)
93
8. VARIABLES ACCION-ANGULO
Prologo: La ecuaci on de Hamilton-Jacobi nos proporciona un metodo de
transformar un conjunto de variables q, p a un segundo conjunto de variables
can onicas Q, P, siendo cada una de las variables can onicas una constante
de movimiento.
Ahora, en este captulo nosotros consideraremos un metodo, valido para
ciertos tipos de movimiento, para transformar un conjunto de variables q,
p, a un segundo conjunto de variables Q, P, no siendo al mismo tiempo las
dos variables can onicas constantes de movimiento.
CONTENIDO:
8.1 Sistemas separables
8.2 Sistemas cclicos
8.3 Variables accion- angulo
8.4 Movimiento en variables accion- angulo
8.5 Importancia de las variables accion- angulo
8.6 Ejemplo: el oscilador arm onico
94
8.1 Sistemas separables.
Por sistemas separables nosotros entenderemos sistemas cuya Hamiltoniana
no sea una funcion explcita del tiempo, es decir
H = H(q, p)
y para los cuales es posible encontrar una soluci on a la ecuaci on de Hamilton-
Jacobi independiente del tiempo, de la forma
W(q, ) =
i
W
i
(q
i
, ) .
8.2 Sistemas cclicos.
Sabemos que el estado de un sistema se encuentra caracterizado por un
conjunto de coordenadas generalizadas q q
1
, q
2
, ..., q
f
y por el conjunto
de momenta generalizados p p
1
, p
2
, ..., p
f
. Conforme el sistema se mueve,
este traza una orbita en el espacio q, p (el espacio cuyas coordenadas son
las variables q
1
, q
2
, ..., q
f
, p
1
, p
2
, ..., p
f
). De igual forma, el sistema traza una
orbita en cada uno de los subespacios q
i
, p
i
. La orbita en cada uno de los
planos q
i
, p
i
puede ser representada por una ecuaci on de la forma p
i
= p
i
(q
i
)
o por un par de ecuaciones p
i
= p
i
(t), q
i
= q
i
(t). Si para cada valor de
i, la orbita p
i
= p
i
(q
i
) en el plano q
i
p
i
es una curva cerrada, entonces
nos referimos a tal sistema como un sistema cclico. En la siguiente gura
mostramos las dos posibilidades por las cuales un sistema puede ser cclico.
En la Figura 8.1a, el sistema es cclico porque q
i
oscila entre los lmites
denidos q
i
= a y q
i
= b; en la Figura 8.1b, el sistema es cclico porque q
i
se
mueve desde q
i
= a hasta q
i
= b, y luego inicia nuevamente en q
i
= a.
b a
p
i
q
i
a
b
p
i
q
i
Fig.8.1
95
Es necesario en este punto hacer dos importantes aclaraciones:
Aclaracion 1: El termino cclico ha sido introducido solamente para
simplicar la notaci on en las siguientes secciones. No debe interpretarse este
termino pensando que si el sistema es cclico en cada uno de los subespacios
q
i
, pi, entonces el sistema deba regresar a su estado original en el espacio
q, p.
Aclaracion 2: Si un sistema cclico solamente tiene un grado de liber-
tad, el tiempo requerido por el sistema para ejecutar un ciclo en el plano
q p es constante; por tanto el movimiento en el plano q p ser a perodico
en el tiempo. Si el sistema tiene mas de un grado de libertad, entonces,
en general, el tiempo requerido para ejecutar un ciclo particular en uno de
los espacios q
i
, p
i
no ser a una constante, sino que dependera del movimiento
de las otras coordenadas; por tanto, el movimiento en el espacio dado q
i
, p
i
no ser a perodico en el tiempo. Debe de tenerse cuidado en este punto, ya
que no es cierto que cada uno de los movimientos en cada plano q
i
, p
i
es
perodico en el tiempo.
8.3 Variables accion-angulo.
Consideremos un sistema cclico de f grados de libertad, cuyo estado din amico
est a caracterizado por las variables can onicas q, p. Sea H(q, p) la Hamilto-
niana del sistema, y sea
W(q, )
i
W
i
(q
i
, ) ,
(donde =
1
,
2
, ...,
f
son constantes) una soluci on a la ecuaci on de
Hamilton-Jacobi independiente del tiempo
H(q,
W
q
) = E .
Sea J J
1
, J
2
, ..., J
f
el conjunto de constantes denidas por las ecuaciones
J
i
() =
_
W
i
(q
i
, )
q
i
dq
i
, (1)
donde la integral es sobre un cilo completo para la variable q
i
. Si nosotros
usamos la funcion
W(q, ) W[q, (J)]
96
i
W
i
[q
i
, (J)]
i
W
i
(q
i
, J)
como una funcion generadora para una transformacion can onica de las vari-
ables q, p a un nuevo conjunto de coordenadas w, y momenta J, es decir, si
denimos las variables w y J por las ecuaciones de transformacion
p
i
=
W(q, )
q
i
=
W
i
(q
i
, J)
q
i
(2)
w
i
=
W(q, J)
J
i
(3)
entonces las nuevas coordenadas w
1
, w
2
, ..., w
f
son llamadas variables angulo,
y los nuevos momenta J
1
, J
2
, ..., J
f
son llamadas variables acci on.
De la ecuaci on (2) obtenemos que
p
i
(q
i
, ) =
W
i
[q
i
, J()]
q
i
=
W
i
(q
i
, )
q
i
. (4)
Sustituyendo la ecuaci on (4) en (1) obtenemos
J
i
() =
_
p
i
(q
i
, )dq
i
. (5)
La ecuaci on p
i
= p
i
(q
i
, ) es la ecuaci on de la proyeccion de la orbita p = p(q)
sobre el subespacio p
i
, q
i
. La integral en el lado derecho de la ecuaci on (5)
es por tanto el area encerrada dentro de la orbita, o bajo la orbita, como se
ilustra por las regiones sombreadas en la Figura 8.1. Por tanto, la funcion
J
i
() puede ser interpretada geometricamente como el area barrida en el
subespacio q
i
, p
i
durante un ciclo completo en este subespacio. Esta area
depende de las constantes o equivalentemente de las condiciones iniciales
y puede en general asumir cualquier valor
14
.
8.4 El movimiento de un sistema en terminos de las
variables de accion-angulo.
Resumimos el movimiento de un sistema en terminos de las variables de
accion- angulo en la siguiente teorema:
14
Historicamente, el primer intento de pasar de la mecanica clasica a la mecanica
cuantica consistio en asumir que el valor que Ji podia tomar no era completamente arbi-
trario, sino que debe ser un m ultiplo de h/2, donde h es la constante de Planck.
97
Teorema 8.4.
Consideremos un sistema ciclico separable de f grados de libertad cuyo
estado din amico est a dado por las variables q, p q
1
, q
2
, ..., q
f
, p
1
, p
2
, ..., p
f
,
y cuyo comportamiento din amico est a dado por el Hamiltoniano H(q, p). Si
nosotros transformamos a las variables de accion- angulo J, w, entonces el
Hamiltoniano H es una funcion de J solamente, es decir,
H = H(J)
y el movimiento del sistema est a dado por
J
i
=
i
w
i
=
i
t +
i
,
donde
i
y
i
son constantes que est an determinadas por las condiciones
iniciales, y las
i
son constantes, llamadas las frecuencias del sistema y se
encuentran denidas como
i
=
_
H(J)
J
i
_
J=
i
.
8.5 Importancia de las variables accion-angulo
La importancia de las variables accion- angulo radica en que proporcionan
una tecnica potente para la obtenci on de la frecuencia de un movimiento
peri odico de un movimiento sin hallar una soluci on completa del movimiento
del sistema.
Lo anterior puede ser visto del siguiente argumento: Consideremos el cambio
de w cuando q describe un ciclo completo, dado por
w =
_
w
q
dq
Por otro lado, sabemos que
w =
W
J
,
por lo que
w =
_
2
W
qJ
dq
98
=
d
dJ
_
W
q
dq
=
d
dJ
_
pdq
= 1 .
El anterior resultado nos indica que w cambia en una unidad cuando q varia
a lo largo de un perodo completo.
De la relaci on
w = t + ,
concluimos que en un perodo
w = 1
= ,
es decir, podemos identicar a la constante con el recproco del perodo,
=
1
.
8.6 Ejemplo: El oscilador armonico simple
A partir del formalisto de las variables accion angulo vamos a demostrar que
la frecuencia del oscilador arm onico simple unidimensional est a dada por
=
_
k/m/2.
Dado que H es una constante de movimiento, la orbita en el espacio q p
est a dada por
p
2
2m
+
kq
2
2
= E ,
donde E es la energa. Esta es la ecuaci on de una elipse con semiejes
2mE
y
_
2E/k. El area encerrada por la elipse es igual al valor de la variable de
accion J. Por tanto,
J =
2mE
2E
k
= 2
_
m
k
E .
Se sigue entonces que
H(J) = E =
_
k/m
2
J
99
y la frecuencia est a dada por
=
H(J)
J
=
_
k/m
2
.
100
9. TEOR
IA CAN
ONICA DE PERTURBACIONES
Prologo: Existen muchos problemas en la naturaleza que no pueden ser
resueltos de manera exacta. Por esta raz on, y tomando en cuenta el gran
desarrollo experimentado por la inform atica, se ha puesto mucho interes en
el desarrollo de metodos para hallar soluciones aproximadas. El metodo de
perturbaciones se aplica cuando se tiene un problema fsico que no se puede
resolver exactamente, pero cuya Hamiltoniana diere s olo ligeramente de
la Hamiltoniana correspondiente a un problema que puede resolverse de
manera exacta. A la diferencia entre ambas Hamiltonianas se le conoce
como la Hamiltoniana de la perturbaci on y la teora de perturbaciones est a
basada en la pequ nez de la misma.
CONTENIDO:
9.1 Teora de perturbaciones dependiente del tiempo (con dos ejemplos)
9.2 Teora de perturbaciones independiente del tiempo (con un ejemplo)
101
9.1 Teora de pertubaciones dependiente del tiempo
La formulaci on de la mec anica clasica que simplica m as el desarrollo de la
teora de perturbaciones es la de Hamilton-Jacobi. Consideremos entonces
que H
0
(p, q, t) es la Hamiltoniana correspondiente al problema soluble o no
perturbado, y que se ha solucionado mediante la funcion principal de Hamil-
ton S(q,
0
, t), la cual genera una transformacion can onica, de las coorde-
nadas (p, q) a (
0
,
0
), en la que la nueva Hamiltoniana (o Kamiltoniana)
K
0
del sistema no perturbado, es nula. En smbolos:
S
t
+H
0
(
S
q
, q, t) = K
0
= 0 . (1)
Esta es la ecuaci on de Hamilton-Jacobi y hemos usado que p = S/q. Las
coordenadas can onicas transformadas (
0
,
0
) son entonces todas constantes
en el caso no perturbado, ya que K
0
= 0 y:
0
=
K
0
0
,
0
=
K
0
0
. (2)
Consideremos ahora la hamiltoniana del sistema perturbado como:
H(q, p, t) = H
0
(q, p, t) + H(q, p, t); (H H
0
). (3)
Aunque (
0
,
0
) siguen siendo coordenadas can onicas (pues la transfor-
maci on generada por S es independiente de la forma particular de la hamil-
toniana), ya no ser an constantes y la Kamiltoniana del sistema perturbado
(K) no ser a nula. Para no olvidar que en el sistema perturbado las coor-
denadas transformadas ya no son constantes, las denotaremos como y ,
en vez de
0
y
0
, que seran sus correspondientes valores constantes en el
sistema no perturbado. En el sistema perturbado tenemos pues que:
K(, , t) = H +
S
t
= (H
0
+
S
t
) + H = H(, , t). (4)
Las ecuaciones de movimiento que satisfacen las variables transformadas del
sistema pertubado son entonces:
102
i
=
H(, , t)
i
=
H(, , t)
i
, (5)
donde i = 1, 2, ..., n y n es el n umero de grados de libertad del sistema.
Las ecuaciones anteriores son rigurosas. Si del sistema de 2n ecuaciones se
pudieran obtener
i
y
i
como funcion del tiempo, las ecuaciones de trans-
formacion (p, q) (, ) daran p
i
y q
i
en funcion del tiempo y el problema
estara resulto. Sin embargo, la soluci on exacta de las ecuaciones en (5)
no suele ser menos difcil que la soluci on de las ecuaciones originales. De
(5) vemos que a un cuando y ya no son constantes, su variaci on con el
tiempo es lenta, si suponemos que H cambia poco respecto a y . Una
primera aproximacion a la variaci on temporal de (, ) se obtiene susti-
tuyendo en los segundos miembros de (5) a y por sus valores constantes
o no perturbados; es decir:
i1
=
H(, , t)
i1
=
H(, , t)
0
, (6)
donde
i1
y
i1
representan las soluciones a primer orden de perturbacion
para
i
y
i
, y las barras verticales con subndece cero indican que despues
de la derivacion deben sustituirse y por sus valores constantes no per-
turbados. Hecho esto, las ecuaciones en (6) se pueden integrar para dar las
i
y las
i
en funcion del tiempo (a primer orden). Luego, mendiante las
ecuaciones de transformacion se obtienen p y q como funcion del tiempo en
una primera aproximacion. La aproximacion de segundo orden se obtiene
sustituyendo en los segundos miembros de (6) la primera aproximacion de
la dependencia de y con respecto al tiempo. En general, la soluci on de
perturbacion de orden N se obtiene integrando las ecuaciones:
iN
=
H(, , t)
N1
iN
=
H(, , t)
N1
. (7)
Ejemplo 1
Consideraremos aqu el caso simple de una partcula libre, que m as adelante
103
sujetaremos a una perturbacion arm onica simple. Este ejemplo, aunque triv-
ial, servir a para ilustrar el procedimiento delineado antes. La Hamiltoniana
no pertubada es:
H
0
=
p
2
2m
. (8)
Puesto que H
0
,= H
0
(x), es decir, como x es cclica, p =
0
es una constante
en el sistema no perturbado. Recordando que p = S/x y sustituyendo en
(1):
1
2m
_
S
x
_
2
+
S
t
= 0. (9)
Ahora bien, dado que el sistema es conservativo, resulta conveniente consid-
erar una funcion principal de la forma:
S = S(x) +F(t). (10)
Esta clase de separacion de variables, es especialmente util cuando la Hamil-
toniana no depende explcitamente del tiempo, en donde se propone que
F(t) = Et, con E como la energa total del sistema
15
. Con (10) en (9)
tenemos que:
1
2m
_
dS
dx
_
2
= E, S =
2mEx =
0
x. (11)
Y sustituyendo (11) en (10), junto con el hecho de que en este caso la
Hamiltoniana es igual a la energa, tenemos que la funcion principal de
Hamilton es:
S =
0
x
2
0
t
2m
. (12)
Si el momentum transformado es
0
, la coordenada transformada (que
tambien es constante en el sistema no perturbado) es:
0
=
S
0
= x
0
t
m
,
15
Vease: Spiegel, Murrary R. Mecanica Teorica, pp. 315, 316.
104
de modo que la transformacion generada por S est a dada por las ecuaciones:
p =
0
,
x =
0
t
m
+
0
, (13)
que es la soluci on esperada para el movimiento de una partcula libre. Lo
realizado hasta aqu s olo muestra el procedimiento para hallar las ecuaciones
del movimiento mediante la formulaci on de Hamilton-Jacobi. Es hasta ahora
que introduciremos una perturbacion de la forma:
H =
kx
2
2
=
m
2
x
2
2
, (14)
o bien, en terminos de las coordenadas transformadas, utilizando (13):
H =
m
2
2
_
t
m
+
_
2
. (15)
Notese que en la expresi on anterior hemos suprimido ya los subndices 0 de
las coordenadas transformadas, pues estamos ya ocup andonos del sistema
perturbado.
Sustituyendo (15) en (5):
= m
2
_
t
m
+
_
,
=
2
t
_
t
m
+
_
. (16)
Las ecuaciones anteriores tienen una soluci on exacta y es de forma arm onica,
como cabe esperar. Para asegurarnos s olo derivamos respecto al tiempo la
primera de las ecuaciones y llegaremos a que tiene una variaci on arm onica
siemple, lo que tambien puede asegurarse de x en virtud de las ecuaciones
de transformacion dadas en (13), que siguen manteniendo su forma en el sis-
tema perturbado (omitiendo, claro, los subndices de las coordenadas trans-
formadas). Sin embargo, nos interesa ilustrar el metodo de perturbaciones,
as que consideremos que k (la constante elastica) es un par ametro peque no
y busquemos soluciones aproximadas de distintos ordenes de perturbacion,
sin perder de vista que las variables transformadas (, ) en el sistema per-
turbado dejaran de ser constantes. Dicho de otra manera, a un cuando (, )
105
contienen informaci on referente a los par ametros del sistema no perturbado,
el efecto de la perturbacion es hacer variar estos par ametros con el tiempo.
La perturbacion de primer orden se obtiene seg un est a indicado de manera
general en (6). As que debemos sustituir en los segundos miembros de (16),
y por sus valores no perturbados. Para simplicar consideremos que
x(t = 0) = 0 y por tanto que
0
= 0, entonces:
1
=
2
0
t,
1
=
0
2
t
2
m
, (17)
que luego de integrar nos conduce a:
1
=
0
0
t
2
2
,
1
=
0
2
t
3
3m
. (18)
Las soluciones para x y p a primer orden las obtenemos sustituyendo
1
y
1
en las ecuaciones de transformacion (13), de donde:
x =
0
m
_
t
3
t
3
6
_
,
p =
0
_
1
2
t
2
2
_
. (19)
Para generar la soluci on aproximada a un segundo orden de perturbacion
debemos hallar
2
y
2
, seg un se indic o en (7), sustituyendo en los segundos
miembros de (16), y por
1
y
1
como fueron dadas en (18). Integrando
2
y
2
y luego utilizando de nuevo las ecuaciones de transformaci on (13),
llegamos a las soluciones de segundo orden para x y p:
x =
0
m
_
t
3
t
3
3!
+
5
t
5
5!
_
,
p =
0
_
1
2
t
2
2!
+
4
t
4
4!
_
. (20)
En el lmite en que el orden de perturbacion N tiende a innito, obtenemos
las soluciones esperadas y compatibles con las condiciones iniciales:
106
x
0
m
sin t, p
0
cos t. (21)
Las variables transformadas (, ) contienen informaci on referente a los
par ametros de la orbita sin perturbar. Por ejemplo, si consideramos como
sistema no perturbado aquel correspondiente al problema de Kepler, un sis-
tema adecuado de coordnadas (, ) podran ser las variables (J, ) que son
respectivamente la variable accion y el angulo de fase que aparece en en
la variable angulo w (recordar que w = t + , donde es la frecuencia).
Estas variables est an relacionadas con los p arametros orbitales tales como
el semieje mayor, la excentricidad, la inclinaci on, etc.
El efecto de perturbacion es hacer variar estos par ametros con el tiempo. Si
la perturbacion es peque na, la variaci on de los par ametros durante un perodo
del movimiento no perturbado tambien ser a peque na. De modo que por
cortos intervalos de tiempo el sistema se mover a a lo largo de una orbita,
llamada orbita osculatriz, que es de la misma forma funcional que la del
sistema no perturbado; sin embargo, los par ametros de esta orbita varan
con el tiempo.
Los par ametros de la orbita osculatriz pueden variar con el tiempo de dos
maneras:
Variaci on peri odica: el par ametro vuelve a su valor inicial despues
de un intervalo de tiempo que en primera aproximacion suele ser el
perodo del movimiento no perturbado. Estos efectos de la pertur-
baci on no alteran los valores medios de los par ametros y por tanto la
trayectoria sigue siendo muy parecida a la orbita no perturbada. Es-
tos efectos se pueden eliminar promediando la perturbacion sobre un
perodo del movimiento no perturbado.
Variaci on secular: Al nal de cada uno de los perodos orbitales suce-
sivos hay un incremento neto del valor del par ametro. Al cabo de
muchos perodos los par ametros orbitales pueden ser muy diferentes
de sus valores no perturbados. Rara vez interesa el valor instantaneo
de la variaci on de alg un par ametro, digamos la frecuencia, porque su
variaci on es muy peque na en la mayora de casos en que funciona
el formalismo de la teora de las perturbaciones. (Esta variaci on es
tan peque na que resulta difcil, sino imposible, percibirla en uno solo
perodo orbital, y por eso se mide s olo la variaci on secular despues de
varios perodos.)
Ejemplo 2
107
Del problema de dos cuerpos tenemos que si al potencial de Kepler se le
suma un potencial de la forma 1/r
2
, la orbita del problema acotado es una
elipse que gira y cuyo peri apsis est a animado de precesion. Encontraremos
aqu la velocidad de precesion, considerando un potencial perturbador algo
m as general:
V =
k
r
h
r
n
, (22)
donde n( 2) es un entero, y h es tal que el segundo termino del potencial sea
una peque na perturbacion del primero. La Hamiltoniana de la perturbacion
ser a pues:
H =
h
r
n
. (23)
En el problema sin perturbar, la posici on angular del peri apsis en el plano
de la orbita viene dada por la constante = 2w
2
. En el caso perturbado:
= 2
H
J
2
=
H
l
, (24)
donde hemos usado J
2
= 2l. Adem as J
2
y w
2
son dos de las cinco con-
stantes del movimiento a las que lleva el tratamiento del problema de Kepler
mediante las variables de accion angulo.
Necesitamos conocer el promedio de en un perodo de la orbita no pertur-
bada :
)
1
_
0
H
l
dt =
l
_
1
_
0
H dt
_
=
H)
l
. (25)
Pero el promedio temporal de la Hamiltoniana no perturbada es:
H) = h
1
r
n
) =
h
_
0
dt
r
n
. (26)
Por otro lado, sabemos que l = mr
2
(d/dt), de donde podemos despejar dt
y sustituirlo en (27), con lo que
108
H) =
mh
l
_
2
0
d
r
n2
=
mh
l
_
mk
l
2
_
n2
_
2
0
[1 +e cos ( )]
n2
d . (27)
donde es una fase constante, e es la excentricidad, y donde se ha expresado
r en funcion de haciendo uso de la ecuaci on general de la orbita (con el
origen en un foco de la conica correspondiente):
1
r
=
mk
l
2
[1 +e cos ( )] (28)
.
En el caso en que n = 2:
H) =
2mh
l
,
) =
2mh
l
2
. (29)
En el caso en que n = 3:
H) =
2m
2
hk
l
3
,
) =
6m
2
hk
l
4
. (30)
Este ultimo caso, n = 3, reviste una importancia especial, ya que la teora de
la Relatividad General predice una correcci on del movimiento newtoniano
del orden de r
3
precisamente. Tal prediccion se someti o a prueba con el
celebre problema de la precesion de la orbita de Mercurio. Sustituyendo
los apropiados valores de perodo, masa, semieje mayor de la orbita (que
va incluido en h), etc., la ecuaci on (30) predice una velocidad media de
precesion:
) = 42.98 arcsegundos/siglo .
El valor medido es mucho mayor que el mencionado arriba (por un factor
mayor que 100). Pero antes de hacer cualquier comparacion deben elimi-
narse del valor medido, las contribuciones debidas a: a) el efecto conocido
como la precesion de los equinoccios (movimiento del punto de referencia
109
de longitudes respecto a la galaxia), b) las perturbaciones de la orbita de
Mercurio debido a la interacci on con los otros planetas. Una vez eliminados
estos efectos (de los cuales el primero es el de mayor peso), se debe obtener
lo que sera la contribucion al valor medido de , debido al efecto relativista.
En 1973 se calcul o esta ultima contribucion en (41.40.9) arcsegundos/siglo,
que es consistente con la prediccion que se obtiene de (30).
9.2 Teora de perturbaciones independiente del tiempo
Mientras que la teora de perturbaciones dependiente del tiempo busca la
dependecia temporal de los, en un principio constantes, par ametros del sis-
tema no perturbado, la teora independiente del tiempo pretende hallar las
cantidades que son constantes en el sistema pertubado. Esta teora se aplica
s olo a sistemas conservativos y peri odicos (tanto en el estado perturbado,
como en el no perturbado). Por ejemplo, se aplica en el caso de movimien-
tos planetarios cuando se introduce cualquier perturbaci on conservativa al
problema de Kepler (metodo de von Zeipel o de Poincare).
Consideraremos aqu el caso de sistemas de un solo grado de libertad. Con-
sideremos un sistema peri odico con una Hamiltoniana indepentiente del
tiempo de la forma:
H = H(p, q, ), (31)
donde es una constante que especica la magnitud de la perturbaci on y
se supone sucientemente peque na. Asumimos que
H
0
(p, q) = H(p, q, 0) (32)
corresponde a un sistema que puede resolverse exactamente (sistema no
perturbado), por medio del uso de las convenientes variables accion- angulo
(J
0
, w
0
):
H
0
(p, q) = K
0
(J
0
)
0
= w
0
=
K
0
J
0
; (w
0
=
0
t +
0
). (33)
La transformacion can onica que nos lleva de (p, q) a (J
0
, w
0
) es independi-
ente de la forma particular de la Hamiltoniana. Entonces, la Hamiltoniana
perturbada H(p, q, ) puede escribirse como H(J
0
, w
0
, ). Debido a que la
Hamiltoniana perturbada s depende de w
0
, J
0
ya no es constante. Por otro
110
lado, en principio, uno puede obtener nuevas variables accion- angulo (J, w)
apropiadas para el sistema perturbado, tales que:
H(p, q, ) = E(J, )
= w =
E
J
(34)
J =
E
w
= 0 ; (J = constante).
Puesto que la transformacion que conecta (p, q) a (J
0
, w
0
) es conocida, ahora
debemos encontrar la transformacion can onica S, que conecta (J
0
, w
0
) a
(J, w). Si asumimos que es peque na, la transformacion que buscamos
no debe diferir mucho de la transformacion identidad. La expansi on de la
funcion generadora que buscamos ser a entonces:
S = S(w
0
, J, ) = S
0
(w
0
, J) +S
1
(w
0
, J) +
2
S
2
(w
0
, J) +... . (35)
Para = 0 requerimos que S sea la identidad; entonces hacemos:
S
0
= w
0
J . (36)
Las transformaciones can onicas generadas por S son:
w =
S
J
= w
0
+
S
1
J
(w
0
, J) +
2
S
2
J
(w
0
, J) +... .
J
0
=
S
w
0
= J +
S
1
w
0
(w
0
, J) +
2
S
2
w
0
(w
0
, J) +... . (37)
Debido a que w
0
es una variable angulo (del sistema no perturbado), sabemos
que w
0
= 1 sobre un ciclo. Por otro lado, sabemos que las transformaciones
can onicas tienen la propiedad de conservar el volumen en el espacio de fase.
Por tanto, podemos escribir:
J =
_
pdq =
_
J
0
dw
0
. (38)
Integrando la segunda ecuaci on en (37) sobre una orbita del sistema pertur-
bado, tenemos:
_
J
0
dw
0
=
_
Jdw
0
+
n=1
n
_
S
n
w
0
dw
0
, (39)
111
y sustituyendo (39) en (38):
J = Jw
0
+
n=1
n
_
S
n
w
0
dw
0
. (40)
En vista de que w
0
= 1, debe cumplirse que:
n=1
n
_
S
n
w
0
dw
0
= 0, (41)
o bien que:
_
S
n
w
0
dw
0
= 0. (42)
Ademas, la Hamiltoniana puede expanderse en como funcion de w
0
y J
0
:
H(w
0
, J
0
, ) = K
0
(J
0
) +K
1
(w
0
, J
0
) +
2
K
2
(w
0
, J
0
) +... , (43)
donde las K
i
son conocidas, ya que H es una funcion conocida de w
0
y J
0
para una dada. Por otro lado tenemos que:
H(p, q, ) = H(w
0
, J
0
, )
= E(J, ) , (44)
que es la expresi on para la energa in las nuevas coordenadas de accion
angulo (donde J ser a constante y w ser a funcion lineal del tiempo).
Podemos tambien expandir E en potencias de :
E(J, ) = E
0
(J) +E
1
(J) +
2
E
2
(J) +... . (45)
En virtud de (44) podemos igualar los coecientes de las distintas potencias
de en (43) y (45). Sin embargo, estas dos expresiones para la energa
dependen de dos diferentes conjuntos de variables. Para resolver esto ex-
presaremos H
0
en terminos de J, y esto se logra haciendo una expansi on de
Taylor de H(w
0
, J
0
, ) respecto de J
0
alrededor de J:
112
H(w
0
, J
0
, ) = H(w
0
, J, ) + (J
0
J)
H
J
+
(J
0
J)
2
2
2
H
J
2
+... , (46)
Las derivadas del desarrollo de Taylor son, hablando con propiedad, derivadas
respecto a J
0
calculadas en J
0
= J, si bien podemos escribirlas sin perdidas
de rigor, en la forma de derivadas con respecto a J, una vez sustituida J
0
por
J en H
0
(J
0
). En la ecuaci on anterior, todo termino que contiene a J
0
debe
reescribirse en terminos de J haciendo uso de la transformacion denida por
(37) que conecta las coordenadas (J
0
, w
0
) con (J, w). As que, de la segunda
ecuaci on en (37) obtenemos (J
0
J), que sustitudo en (46) da:
H(w
0
, J
0
, ) = H(w
0
, J, ) +
H
J
_
S
1
w
0
+
2
S
2
w
0
+...
_
+
1
2
2
H
J
2
2
_
S
1
w
0
_
2
+O(
3
) .(47)
Luego, podemos hacer uso de (43) para expresar H(w
0
, J, ) = H(w
0
, J
0
, ) [
J
0
=J
,
y sustituir luego en la ecuaci on (47) para obtener:
H(w
0
, J
0
, ) = K
0
(J) +K
1
(w
0
, J) +
2
K
2
(w
0
, J) +...
+
S
1
w
0
_
K
0
(J)
J
+
K
1
(w
0
, J)
J
+...
_
+
2
_
K
0
(J)
J
S
2
w
0
+
1
2
2
K
0
J
2
_
S
1
w
0
_
2
+...
_
E(J, ) (48)
= E
0
(J) +E
1
(J) +
2
E
2
(J) +... .
Ahora, podemos resolver para los coecientes E
i
(J); esto nos dar a la posibil-
idad de calcular la frecuencia del movimiento perturbado a distintos ordenes
de perturbacion. Puesto que la expansi on de los terminos de E
i
no involucra
una dependencia en w
0
, entonces la aparici on de w
0
en (48) debe ser espuria.
Las K
i
(w
0
, J) de (48) son funciones conocidas, mientras que las S
i
(w
0
, J) y
las E
i
(J) son desconocidas.
Igualando potencias de tenemos:
E
0
(J) = K
0
(J)
E
1
(J) = K
1
(w
0
, J) +
S
1
w
0
K
0
(J)
J
E
2
(J) = K
2
(w
0
, J) +
S
1
w
0
K
1
(w
0
, J)
J
+
1
2
_
S
1
w
0
_
2
2
K
0
(J)
J
2
+
S
2
w
0
K
0
(J)
J
. (49)
113
Vemos que, para determinar E
1
necesitamos conocer S
1
adem as de K
1
.
No debemos perder de vista que la E
i
son constantes, pues son s olo fun-
ciones de J (que es una constante del movimiento). Tambien debemos no-
tar que K
0
/J es un termino independiente de w
0
(pues K
0
= K
0
(J) =
K
0
(J
0
) [
J
0
=J
). Si promediamos sobre w
0
en ambos lados de la segunda
ecuaci on en (49), obtenemos:
E
1
= E
1
)
= K
1
) +
K
0
J
S
1
w
0
) . (50)
Pero hemos visto ya que S
i
/w
0
) =
_
(S
i
/w
0
)dw
0
= 0. Luego,
E
1
= E
1
) = K
1
) . (51)
Sustituyendo (51) en el miembro izquierdo de la segunda ecuaci on de (49) y
despejando luego (S
1
/w
0
), tenemos que:
S
1
w
0
=
K
1
) K
1
0
(J)
, (52)
en donde hemos usado que
0
= K
0
/J.
La soluci on para S
1
se encuentra por integraci on directa. En general, vemos
que el procedimiento para hallar E
n
es el que sigue (una vez asumido que
se ha resuelto ya para E
n1
):
Promediar en ambos lados de la n-esima ecuaci on de (49).
Insertar el valor promediado de E
n
que se hall o, en la ecuaci on com-
pleta que se daba en (49) para E
n
(es decir, la que haba antes de
promediar).
La unica expresi on desconocida que queda entonces, ser a S
n
que podr a
obtenerse integrando en:
S
n
w
0
= funcion conocida de w
0
y J .
Sustituir S
n
en la ecuaci on completa para E
n
.
114
Una vez hecho esto, se puede continuar para el orden de perturbacion n+1.
Seg un podemos ver la determinacion de la energa a un orden particular n
se determina s olo cuando se ha hallado S
n1
, y S
n
puede determinarse s olo
cuando se ha hallado E
n
.
La teora de perturbaciones independiente del tiempo, es muy similar al
esquema de perturbaciones de Rayleigh y Schr odinger en la mec anica ondu-
latoria. En la teora ondulatoria, se conoce E
n
s olo si la funcion de onda
se conoce a un orden n 1. Y adem as, la funcion de onda de orden n se
encuentra s olo cuando se ha calculado E
n
.
Bibliografa
H. Goldstein, Mec anica Cl asica,2a. ed. Versi on espa nola. Editorial
Reverte S.A.,1992.
R.A. Matzner and L.C. Shepley, Classical Mechanics, Prentice-Hall,
Inc. U.S.A., 1991.
R. Murray, Mec anica Te orica, Spiegel, Edicion en espa nol. McGraw-
Hill S.A. de C.V. Mexico, 1976.
L.D. Landau and E.M. Lifshitz, Mechanics, 3rd. ed. Course of Theo-
retical Physics, Volume 1. Pergamon Press, Ltd. 1976.
115
10. INVARIANTES ADIABATICOS
Prologo: Un invariante adiab atico es una funcion de los par ametros y de las
constantes del movimiento de un sistema, que permanece casi constante en el
lmite en el que los p arametros cambian innitamente despacio en el tiempo,
aunque ellos puedan en ultima instancia cambiar por grandes cantidades.
CONTENIDO:
10.1 BREVE HISTORIA
10.1 GENERALIDADES
116
10.1 BREVE HISTORIA
La nocion de invarianza adiab atica se remonta a los primeros a nos de la
teora cu antica. Alrededor de 1910, quienes estudiaban la emisi on y ab-
sorci on de radiaci on, notaron que los atomos podan existir en estados esta-
bles en los que su energa estaba ja. Einstein llam o la atenci on acerca de la
cantidad que permaneca casi invariante en un pendulo cuya longitud vari-
aba continua y lentamente (la cantidad E/).
El sugirio que podran existir
cantidades similares asociadas con los sistemas atomicos, que determinaran
la estabilidad de los mismos cuando estas cantidades adquirieran ciertos
valores. Tales invariantes adiab aticas fueron luego encontradas por Ehren-
fest y su uso condujo a la primitiva teora cu antica de Bohr y Sommerfeld.
Esta teora trabajaba bien para los estados del hidrogeno, pero fracasaba
cuando se le aplicaba a otros atomos. Mas tarde, en 1925-6, surgio una
teora cu antica altamente exitosa, debida a Schr odinger, Heisenberg, Born
y otros; esta teora empleaba un enfoque diferente.
El tema de la invarianza adiab atica surgio nuevamente despues de varias
decadas, en el estudio de iones y electrones en movimiento en el espacio. Este
tema era del interes de cientcos escandinavos que estudiaban el fenomeno
de las auroras. Uno de ellos, H. Alfven, mostro en su libro Electrodin amica
C osmica que bajo condiciones apropiadas cierta combinaci on matem atica
de propiedades de los iones y electrones permanecan constantes a primer
orden. Aparentemente, Alfven no se percat o de que estaba tratando con la
misma clase de invariantes adiab aticas denidas por Ehrenfest. Fueron L.
Landau y E. Lifshitz quienes se nalaron la relaci on que haba con el tema de
invariantes adiab aticas.
10.2 GENERALIDADES
Mostraremos primero, de una manera sencilla, cu al es la cantidad invariante
adiab atica en el caso del movimiento arm onico simple. El metodo a seguir
consistira en mostrar que, en el lmite de la variaci on innitamente lenta
de los par ametros, el invariante adiab atica del sistema unidimensional se
aproxima a una cantidad que se conserva exactamente en el correspondiente
sistema bidimensional.
Consideremos un sistema de un grado de libertad, inicialmente conservativo
y peri odico, que contenga un par ametro a que ser a inicialmente constante.
La variaci on lenta del par ametro no alterar a la naturaleza peri odica del
movimiento. Por una variaci on lenta entendemos aquella en la que a vara
ligeramente durante un perodo del movimiento:
(da/dt) a . (1)
117
Pero, a un cuando las variaciones de a sean peque nas en un perodo cualquiera,
al cabo de un tiempo sucientemente largo las propiedades del movimiento
pueden experimentar cambios grandes.
Cuando el par ametro a sea constante, el sistema vendra descrito por vari-
ables accion angulo (w
0
, J
0
) tales que la Hamiltoniana ser a H = H(J
0
, a).
Supongamos que la funcion generadora de la transformacion (q, p) (w
0
, J
0
),
es de la forma: W
(q, w
0
, a).
Cuando se deja variar a con el tiempo, (w
0
, J
0
) ser an a un variables can onicas
validas pero W
ser a funcion del tiempo a traves de a. Entonces J
0
no ser a
constante y w
0
ya no ser a m as funcion lineal del tiempo. La Hamiltoniana
apropiada ser a ahora:
K(w
0
, J
0
, a) = H(J
0
, a) +
W
t
= H(J
0
, a) + a
W
a
. (2)
El segundo miembro de la Hamiltoniana se puede ver como una perturbacion
y la dependencia temporal de J
0
viene de:
J
0
=
K
w
0
= a
w
0
_
W
a
_
. (3)
Procediendo en una forma an aloga a como se procede en la teora de per-
turbaciones dependiente del tiempo, buscamos la variaci on a primer orden
en el valor medio de
J
0
a lo largo del per odo del movimiento no pertur-
bado. Como a vara lentamente, podemos considerarla constante durante
este intervalo y entonces podemos escribir:
J
0
) =
1
a
w
0
_
W
a
_
dt =
a
w
0
_
W
a
_
dt +O( a
2
, a). (4)
Puede demostrarse que W
es una funcion peri odica en w
0
, y por consigu-
iente, tanto ella como su derivada respecto a a, pueden escribirse como una
serie de Fourier:
W
a
=
k
A
k
e
2ikw
0
. (5)
Sustituyendo (81) en (80):
118
J
0
) =
a
k
2ikA
k
e
2ikw
0
dt +O( a
2
, a). (6)
Como el integrando no tiene ning un termino constante, la integral se anula.
Luego,
J
0
) = 0 +O( a
2
, a). (7)
Por tanto,
J
0
) no tendra variaci on secular de primer orden (o sea en a),
que es una propiedad deseada de la invarianza adiab atica. De modo que el
termino casi constante en nuestra denicion de invariante adiab atica, debe
ser interpretada como constante a primer orden.
Bibliografa complementaria
L. Parker, Adiabatic invariance in simple harmonic motion, Am. J.
Phys. 39 (1971) pp. 24-27.
A.E. Mayo, Evidence for the adiabatic invariance of the black hole
horizon area, Phys. Rev. D58 (1998) 104007 [gr-qc/9805047].
119
11. MECANICA DE SISTEMAS CONTINUOS
Prologo: Todas las formulaciones de la mec anica tratadas hasta ahora han
estado dirigidas al tratamiento de sistemas que tengan un n umero de grados
de libertad nito o, como m aximo, numerablemente innito . Sin embargo,
existen ciertos problemas mec anicos que entra nan sistemas continuos, como
por ejemplo el problema de un s olido elastico en vibracion. En el cada punto
del s olido continuo participa en las oscilaciones y el movimiento total s olo
puede describirse especicando coordenadas de posici on de todos los puntos.
No resulta difcil modicar las formulaciones anteriores de la mec anica para
poder tratar dichos problemas. El metodo m as directo consiste en aproximar
el sistema continuo a uno que contenga partculas discretas y luego exami-
nar como cambian las ecuaciones que describen el movimiento, cuando nos
aproximamos al lmite continuo.
CONTENIDO:
11.1 Formulaci on Lagrangiana: de discreto a continuo.
11.2 Formulaci on Lagrangiana para sistemas continuos.
11.3 Formulaci on Hamiltoniana, parentesis de Poisson.
11.4 Teorema de Noether.
120
11.1 Formulacion Lagrangiana: Transicion de un
sistema discreto a un sistema continuo.
Como uno de los casos mas sencillos en el que se puede pasar de un sis-
tema discreto a uno continuo consideremos el de una varilla elastica in-
nitamente larga que efect ua peque nas vibraciones longitudinales, es decir,
desplazamientos oscilantes de las partculas de la varilla paralelos a su eje.
Un sistema compuesto por partculas discretas que se aproxime a la varilla
continua es una cadena innita de puntos materiales iguales separados por
distancias a y unidos por resortes uniformes sin masa de constante de rigides
k (ver la gura).
i i i 1 +1
en
quilibrio
desplazado
del
e
equilibrio
Supondremos que los puntos materiales s olo pueden moverse a lo largo de la
direcci on de la cadena . Podemos ver que el sistema discreto es una extension
de la molecula poliatomica lineal tratada en el captulo 6 de Goldstein. Po-
dremos, pues, obtener las ecuaciones que describen el movimiento mediante
las tecnicas habituales para oscilaciones peque nas. Representando por
i
el
desplazamiento de la partcula i-esima respecto a su posici on de equilibrio,
la energa cinetica es
T =
1
2
i
m
.
2
i
, (1)
donde m es la masa de cada partcula. La energa potencial correspondiente
es la suma de las energas potenciales de cada resorte a consecuencia de
hallarse estirado o comprimido respecto a su longitud natural:
V =
1
2
i
k (
i+1
i
)
2
. (2)
De las ecuaciones (1) y (2) obtenemos la Lagrangiana del sistema
L = T V =
1
2
i
_
m
.
2
i
k (
i+1
i
)
2
_
, (3)
que tambien puede escribirse de la forma
L =
1
2
i
a
_
m
a
.
2
i
ka
_
i+1
i
a
_
2
_
=
i
aL
i
, (4)
121
donde a es la separacion de equilibrio entre puntos. Las ecuaciones de
movimiento de Lagrange para las coordenadas
i
resultan ser
m
a
i
ka
_
i+1
i
a
2
_
+ka
_
i1
a
2
_
= 0. (5)
La forma particular de L de la ecuaci on (4) y las ecuaciones de movimiento
correspondientes las hemos elegido por ser comvenientes para efectuar el
paso al lmite a una varilla continua al tender a cero a. Esta claro que m/a
se reduce a la masa por unidad de longitud del sistema continuo, pero el
valor lmite de ka no resulta tan evidente. Recordemos que en el caso de
una varilla elastica que cumpla la ley de Hooke,el alrgamiento de la varilla
por unidad de longitud es directamente proporcional a la fuerza o tensi on
ejercida sobre ella, relaci on que podemos escribir en la forma
F = Y ,
donde es el alargamiento por unidad de longitud e Y es el m odulo de Young.
Ahora bien, el alargamiento de una longitud a de un sistema discreto, por
unidad de longitud, ser a = (
i+1
i
) /a. La fuerza necesaria para estirar
el resorte esta cantidad es
F = k (
i+1
i
) = ka
_
i+1
i
a
_
,
por lo que a debe corresponder al m odulo de Young de la varilla continua.
Al pasar del caso discreto al continuo, el indice entero i que identica el punto
material particular se convierte en la coordenada de posici on continua x; en
vez de la variable
i
tenemos (x) . Ademas, la cantidad
i+1
i
a
=
(x +a) (x)
a
que gura en L
i
tiende evidentemente al lmite
d
dx
,
cuando a tiende a cero. Por ultimo, la suma extendida a un n umero discreto
de partculas se convierte en una integral extendida a x, la longitud de una
varilla, y la Lagrangiana (4) queda en la forma
L =
1
2
_
_
2
Y
_
d
dx
_
2
_
dx. (6)
En el lmite, cuando a tiende a cero, los dos ultimos terminos de la ecuaci on
de movimiento (5) resultan ser
Lim
a0
Y
a
_
_
d
dx
_
x
_
d
dx
_
xa
_
,
122
tomando de nuevo el lmite cuando a tiende a cero la ecuaci on dene clara-
mente la segunda derivada de . Por tanto, la ecuaci on de movimiento para
la varilla elastica ser a
d
2
dt
2
Y
d
2
dx
2
= 0, (7)
que es la conocida ecuaci on de onda en una dimension con velocidad de
propagacion
=
. (8)
La ecuaci on (8) es la conocida formula de la velocidad de propagacion de
las ondas elasticas longitudes.
Este sencillo ejemplo es suciente para ilustrar las caractersticas principales
de la transicion de un sistema discreto a uno continuo. El hecho mas impor-
tante que hemos de comprender es el papel que desempe na la coordenada
x. No se trata de una coordenada generalizada; s olo hace las veces de ndice
continuo que sustituye al indice discreto i. Al igual que cada valor de x
corresponde una coordenada generalizada (x) . Como depende tambien
de la variable continua t, debemos tal vez escribir con mayor precision que
(x.t). Indicando que x, al igual que t, puede considerarse como par ametro
que entra en la lagrangiana. Si el sistema continuo fuese tridimensional y
no unidimensional, como en este caso, las coordenadas generalizadas se dis-
tinguiran mediante tres indices continuos x, y, z y se escribiran en la forma
(x, y, z, t) . Notemos que las cantidades x, y, z, t son totalmente indepen-
dientes unas de otras y s olo aparecen en como variables explcitas. Las
derivadas de respecto a cualquiera de ellas podr an, pues, escribirse siem-
pre en forma de derivadas totales sin ninguna ambig uedad. La ecuaci on
(6) indica tambien que la lagrangiana aparece como integral para el indice
continuo x; en el caso tridimensional, la lagrangiana tendra la forma
L =
_ _ _
Ldxdydz, (9)
donde L se denomina densidad Lagrangiana. En el caso de vibraciones
longitudinales de la varilla continua, la densidad Lagrangiana es
L =
1
2
_
_
d
dt
_
2
Y
_
d
dx
_
2
_
, (10)
y corresponde al lmite continuo de la cantidad L
i
que aparece en la ecuaci on
(4). Es la densidad de Lagrangiana, m as que la propia Lagrangiana, la que
utilizaremos para describir el movimiento del sistema.
11.2 Formulacion Lagrangiana para sistemas con-
tinuos
Notemos en la ec. (9) que la L para la varilla elastica depende de
= /t,
la derivada espacial de , /x; x y t desempe nan un papel similar al
123
de los par ametros de esta. Si adem as de las interacciones entre vecinos
m as pr oximos hubiesen fuerzas locales, L fuera funcion de la misma . En
general L para todo sistema continuo, puede ser funcion explcita de x y
t. Por tanto, la densidad de Lagrangiana para todo sistema continuo debe
aparecer para todo sistema continuo unidimensional de la forma
L = L
_
,
d
dx
,
d
dt
, x, t
_
. (11)
La Lagrangiana total siguiendo la forma de la ec.(9) ser a
L =
_
Ldx,
y el principio de Hamilton en el lmite del sistema continuo adopta la forma
I =
_
2
1
_
Ldxdt = 0. (12)
Del principio de Hamilton para el sistema continuo, deber a ser posible de-
ducir el lmite continuo de las ecuaciones de movimiento, para esto como en
la secci on 2-2 de Goldstein podemos obtener en el espacio un camino vari-
ado de integraci on conveniente, eligiendo entre una familia de funciones
de dependiente de un par ametro:
(x, t; ) = (x, t; 0) + (x, t) . (13)
Donde (x, t; 0) es la funcion correcta que satisface el principio de Hamilton
y es una funcion cualquiera de buen comportamiento que se anule en los
puntos extremos en t y en x. Si consideramos I funcion de , para que sea
una extremal para la derivada de I respecto de se anular a en = 0. Ahora
por derivacion directa de I tenemos
dI
da
=
_
t
2
t
1
_
x
2
x
1
dxdt
_
L
+
L
d
dt
_
d
dt
_
+
_
L
d
dx
_
_
d
dx
_
dt
_
.
(14)
Como la variaci on de , es decir , se anula en los puntos extremos, inte-
grando por partes seg un x y t obtenemos las relaciones
_
t
2
t
1
L
d
dt
_
d
dt
_
dt =
_
t
2
t
1
d
dt
_
L
d
dt
_
d
d
dt,
y
_
x
2
x
1
L
d
dx
_
d
dx
_
dx =
_
x
2
x
1
d
dx
_
L
d
dx
_
d
d
dx.
De aqu el principio de Hamilton se podr a escribir de la forma
_
t
2
t
1
_
x
2
x
1
dxdt
_
L
d
dt
_
L
d
dt
_
d
dx
_
L
d
dx
__
_
_
0
= 0 . (15)
124
Ahora debida a la naturaleza arbitraria del camino variado implica que la
expresi on entre llaves es cero:
d
dt
_
L
d
dt
_
+
d
dx
_
L
d
dx
_
= 0. (16)
La ecuaci on anterior corresponde a la ecuaci on correcta de movimiento de-
ducida del principio de Hamilton.
En el caso concreto de las vibraciones longitudinales en una varilla elastica,
la forma de la densidad de Lagrangiana ec. (10) indica que
L
d
dt
=
d
dt
,
L
d
dx
= Y
d
dx
,
L
= 0.
As pues, tal como queramos, la ecuaci on de Euler-Lagrange (16) se reduce
a la ecuaci on de movimiento (7).
La formulaci on de Lagrange que acabamos de desarrollar corresponde a sis-
temas continuos, evidentemente, se pude generalizar a sistemas bi- , tridi-
mensionales y cuadridimensionales. Matematicamente, conviene pensar en
un espacio cuadridimensional de coordenadas x
o
= t, x
1
= x, x
2
= y, x
3
= z.
Para un manejo matem atico m as facil introducimos la siguiente notaci on
,
d
dx
;
,j
d
dx
j
;
i,
d
2
i
dx
dx
. (17)
Con esta notaci on, y haciendo la extension a un espacio cuadridimensional,
la forma general de la densidad de Lagrangiana (11) toma la forma:
L = L(
,
,
,
) . (18)
La Lagrangiana total es entonces una integral extendida al espacio tridimen-
sional:
L =
_
L(dx
i
) . (19)
Al principio de Hamilton corresponde una integral extendida a una regi on
de un espacio cuadridimencional
I =
_
L(dx
) = 0, (20)
donde la variaci on de las
se anulan en la supercie S de contorno de
la regi on de integraci on. La deduccion de las correspondientes ecuaciones
de movimiento de Euler-Lagrange tiene lugar simb olicamente como antes.
Consideremos un sistema de funciones
(x
; ) =
(x
) + (x
)
125
variadas de un solo par ametro que se reducen a
(x
) cuando el par ametro
tiende a cero. La variaci on de I equivale a hacer igual a cero la derivada
de I respecto a es decir:
dI
d
=
_
_
L
+
L
_
(dx
) = 0. (21)
Integrando por partes la ec. (21), tenemos
dI
d
=
_
_
L
d
dx
_
L
,
__
(dx
)+
_
(dx
)
d
dx
_
L
_
= 0,
y tomando el lmite cuando tiende a cero la expresi on anterior se reduce
a:
_
dI
d
_
0
=
_
(dx
)
_
L
d
dx
_
L
,
__
_
_
0
= 0. (22)
Ahora debido a la naturaleza arbitraria de la variaci on de cada tipo de
signica que la ecuaci on (22) cuando sea nulo cada uno de los corchetes por
separado esto es:
d
dx
_
L
,
_
= 0. (23)
Las ecuaciones (23) representan un sistema de ecuaciones en derivadas par-
ciales para las cantidades campo, que tiene tantas ecuaciones cuantos valores
diferentes de haya.
Ejemplo: Dada la densidad Lagrangiana para un campo ac ustico
L =
1
2
_
0
.
2
+2P
0
P
0
( )
2
_
.
0
es la densidad m asica de equilibrio y P
0
la presion de equilibrio del gas.
El primer termino de L es la densidad de energa cinetica, mientras que los
terminos restantes representan el cambio que sufre la energa potencial del
gas por unidad de volumen a consecuencia del trabajo efectuado sobre el
gas o por el curso de las contracciones y expansiones que son la marca de
las vibraciones ac usticas, es el cociente entre los calores molares a presion
y a volumen constante obtener las ecuaciones de movimiento.
Solucion:
Con la notaci on cuadridimensional, la densidad de Lagrangiana queda en la
forma
L =
1
2
(
0
i,0
i,0
+ 2P
0
i,i
P
0
i,i
j,j
) . (24)
De la ecuaci on (23) se obtienen las siguientes ecuaciones de movimiento
j,00
P
0
i,ij
= 0, j = 1, 2, 3. (25)
126
Volviendo a la notaci on vectorial, las ecuaciones (25) toman la forma
0
d
2
dt
2
P
0
= 0. (26)
Ahora utilizando el hecho de que en vibraciones de peque na amplitud la
variaci on relativa de la densidad del gas esta dado por la ecuaci on
= .
Ahora aplicando la divergencia y utilizando la ecuaci on anterior obtenemos
2
0
P
0
d
2
dt
2
= 0
la cual es una ecuaci on de onda tridimensional, siendo
=
P
0
0
la velocidad del sonido en los gases.
11.3 Formulacion Hamiltoniana, parentesis de Pois-
son.
11.3.1 Formulacion Hamiltoniana
La formulaci on de Hamilton para sistemas continuos se hace en forma pare-
cida como se hace para sistemas discretos. Para indicar el procedimiento
volvamos a la cadena de puntos materiales tratada anteriormente, donde
para cada
i
hay una cantidad de movimiento can onica
p
i
=
L
i
= a
L
i
i
. (27)
La Hamiltoniana del sistema ser a, entonces
H p
i
.
i
L = a
L
i
i
.
i
L, (28)
o sea
H = a
_
L
i
i
.
i
L
i
_
. (29)
Recordando que en lmite cuando a tiende a cero, L L y la suma de la
ecuaci on (29) se convierte en una integral por lo que el Hamiltoniano toma
la forma:
H =
_
dx
_
L
L
_
. (30)
127
Las cantidades de movimiento can onicas individuales p
i
, dadas por la ecuaci on
(27), se anulan en el lmite de la continuidad, pero podemos denir una den-
sidad de cantidad de movimiento que permanezca nita:
Lim
a0
p
i
a
=
L
. (31)
La ecuaci on (30) tiene la forma de integral espacial de una densidad de
Hamiltoniana H denida por
H =
.
L . (32)
Aun cuando se pueda introducir as una formulaci on de Hamilton de man-
era directa para campos clasicos, demonos cuenta de que el procedimiento
singulariza la variable tiempo a la que habra que darle un tratamiento espe-
cial. Contrasta, pues con el desarrollo que hemos dado a la formulaci on de
Lagrange en el cual se trataban simetricamente las variables independientes
del tiempo y espaciales. Por esta raz on, el metodo de Hamilton, se tratar a
en forma un tanto distinta.
La va evidente para la generalizaci on a un campo tridimensional descrito
por cantidades campo
es la siguiente:
Se dene una cantidad de movimiento can onica
_
x
_
=
L
. (33)
Donde las cantidades
(x
i
, t) ,
(x
i
, t) juntas, denen el espacio fasico de
innitas dimensiones que describe el campo clasico y su desarrollo en el
tiempo.
Analogamente como en el sistema discreto podemos hallar un teorema de
conservacion para que sea algo parecido al correspondiente al de cantidad
de movimiento can onico de sistemas discretos. Si una cantidad de campo
dada
es cclica es decir que L no contenga explcitamente a
, la ecuaci on
de campo de Lagrange presenta el aspecto de enunciado de la existencia de
una corriente conservativa:
d
dx
,
= 0
o sea
d
dt
d
dx
i
L
,i
= 0 . (34)
Se sigue que si es cclica
, existe una cantidad integral que se conservativa
=
_
dV
(x
i
, t) .
La generalizaci on para la densidad de la ecuaci on (32) para una densidad
Hamiltoniana es
H
_
,
,i
,
, x
_
=
L, (35)
128
donde se supone que se puede eliminar la dependencia funcional de
.
por
inversi on de las ecuaciones de denicion (33). De esta denicion se deduce
que
H
=
.
=
.
(36)
en virtud de la ecuaci on (33). Analogamente obtenemos
H
=
L
. (37)
Ahora utilizando las ecuaciones de Lagrange en la ec.(37) queda como
H
=
d
dx
_
L
,
_
=
.
d
dx
i
_
L
,i
_
. (38)
Debido a la aparici on de L aun no tenemos una forma util. Sin embargo,
haciendo una deduccion an aloga a la de los terminos
H
y
H
para
H
,i
tenemos
H
,i
=
,i
,i
,i
=
L
,i
. (39)
Por lo tanto sustituyendo (39) en (38) obtenemos
H
d
dx
i
_
H
,i
_
=
.
. (40)
Las ecuaciones (36) y (40) las podemos expresar con una notaci on m as
pr oxima a la de las ecuaciones de Hamilton para un sistema discreto intro-
duciendo la nocion de derivada funcional denida en la forma
d
dx
i
,i
. (41)
Como H no es funcion de
,i
las ecuaciones ( 36) y (40) se pueden escribir
en la forma
.
=
H
,
.
=
H
. (42)
Ahora con la misma notaci on las ecuaciones de Lagrange (23) toman la
forma
d
dt
_
L
= 0. (43)
Sin embargo, la ventaja casi unica de la derivada funcional estriba en la
semejanza resultante con un sistema discreto. Por otra parte, sorprende el
tratamiento paralelo de las variables temporal y espaciales.
129
11.3.2 Parentesis de Poisson
Podemos obtener otras propiedades de H desarrollando la derivada total
respecto al tiempo de la ecuaci on (35), recordando que hay que considerar
que
.
es funcion de
,
,j
,
. Tenemos, entonces que
dH
dt
=
.
d
.
dt
L
d
.
dt
L
,i
d
,i
dt
L
t
.
En la expresi on el segundo termino y el cuarto se aniquilan debido a la
denicion (33), por lo que la derivada se simplica quedando
dH
dt
=
.
,i
d
,i
dt
L
t
. (44)
Por otra parte, considerando H funcion de
,
,j
,
, la derivada total
respecto al tiempo es
dH
dt
=
.
+
H
+
H
,i
d
,i
dt
+
H
t
, (45)
donde la expresi on se escribio de tal manera que facilite la comparacion con
el segundo miembro de la ecuaci on (44), donde usando las ecuaciones (36),
(37) y (39) obtenemos
H
t
=
L
t
, (46)
la cual es an aloga a la correspondiente para sistemas discretos.
En cambio no se cumple que las derivadas total y parcial respecto al tiempo
no son, en general iguales. Utilizando las ecuaciones de movimiento de
hamilton (ec. (36) y (40)) e intercambiando los ordenes de derivacion, la
ecuaci on (45) se puede escribir como
dH
dt
=
H
d
dx
i
_
H
,i
_
+
H
,i
d
.
dx
i
+
H
t
.
Ahora utilizando la ecuaci on (46) y combinando terminos tenemos nal-
mente
dH
dt
=
d
dx
i
_
.
,i
_
+
H
t
, (47)
que es lo mas que podemos aproximarnos a la ecuaci on correspondiente para
sistemas discretos.
Por otra parte cuando L no contenga a t explcitamente, tampoco la con-
tendra H esto implica la existencia de una corriente consservativa y por lo
tanto la conservacion de una cantidad integral, en este caso
H =
_
HdV . (48)
130
As pues, si H no es funcion explcita del tiempo, la cantidad que se conserva
no es H, sino la cantidad integral H.
La Hamiltoniana no es m as que un ejemplo de funciones que son integrales
de volumen de densidades. Podemos formular directamente un formalismo
general para la derivada respecto al tiempo de dichas cantidades integrales.
Consideremos una cierta densidad | que sea funcion de las coordenadas del
espacio fasico (
), de sus gradientes espaciales y posiblemente de x
:
| = |
_
,
,i
,
,i
, x
_
. (49)
La cantidad integral correspondiente es
U (t) =
_
|dV (50)
donde la integral de volumen se extiende a todo el espacio limitado por la
supercie de contorno sobre la cual se anulan
. Derivando U respecto
al tiempo tenemos en general,
dU
dt
=
_
_
|
+
|
,i
.
,i
+
|
+
|
,i
.
,i
+
|
t
_
dV . (51)
Consideremos un termino tal como
_
dV
|
,i
.
,i
=
_
dV
|
,i
d
.
dx
i
.
Ahora intengrando por partes, considerando que
y las derivadas se anulan
en las supercies de contorno, tenemos
_
dV
|
,i
.
,i
=
_
dV
.
d
dx
i
_
|
,i
_
.
Para el termino en
.
,i
se hace un procedimiento similar. Sustituyendo las
expresiones obtenidas y agrupando coecientes de
.
y de
.
respectivamente,
y usando la notaci on de derivada funcional la ecuaci on (51) se reduce a
dU
dt
=
_
dV
_
|
+
|
+
|
t
_
. (52)
Por ultimo, introduciendo las ecuaciones de movimiento can onicas ( 42),
tenemos
dU
dt
=
_
dV
_
|
_
+
_
dV
|
t
. (53)
La primera integral del segundo miembro corresponde claramente a la forma
de corchete de Poisson. Si | y J son dos funciones de densidad, estas
131
consideraciones nos sugieren la denicion del corchete de Poisson de las
cantidades integrales como
[U, W] =
_
dV
_
|
_
. (54)
Denamos tambien la derivada parcial de U respecto a t, mediante la sigu-
iente expresi on
U
t
=
_
dV
|
t
. (55)
La ecuaci on (53) podr a entonces escribirse en la forma
dU
dt
= [U, H] +
U
t
, (56)
que corresponde precisamente, en esta notaci on a la ecuaci on para sistemas
discretos. Como por denicion, el corchete de Poisson de H consigo misma
es nulo, la ecuaci on (46) se concretara en
dH
dt
=
H
t
, (57)
que es la forma integral de la ec. (47). As pues, el formalismo de corchetes
de Poisson aparece como consecuencia de la formulaci on de Hamilton. Pero
no podemos llevar a cabo una descripcion por corchetes de Poisson de la
teora de campos en correspondencia paso a paso con la de los sistemas
discretos.
Sin embargo, hay una manera de tratar los campos clasicos que provee
casi todo lo de la formulaci on de Hamilton y de corchetes de Poisson de la
Mecanica para sistemas discretos. La idea fundamental de este tratamiento
es sustituir la variable espacial continua o el indice continuo por un indice
discreto numerable.
El requisito de que se anule en los extremos es una condici on de contorno
que se podra realizar fsicamente colocando la varilla entre dos paredes per-
fectamente rigidas. Entonces, la amplitud de oscilaci on se puede representar
mediante una serie de Fourier:
(x) =
n=0
q
n
sin
2n(x x
1
)
2L
. (58)
En vez del indice continuo x tenemos el indice discreto . Podremos utilizar
esta representacion de x solamente cuando (x) sea una funcion regular,
cosa que sucede en la mayora de cantidades de campo fsicas.
Supondremos que s olo hay una cantidad campo real que se puede desar-
rollar en serie de Fourier tridimensional de la forma
(
r , t) =
1
V
1/2
k=0
q
k
(t) exp
_
i
r
_
(59)
132
Aqu,
k es un vector de onda que solo puede tomar m odulos y direcciones
discretos de manera que en una dimension lineal dada s olo encaje un n umero
entero (o a veces semientero) de longitudes de onda. Decimos que
k tiene un
espectro discreto. El subindice escalar k representa una cierta ordenacion del
sistema de indices enteros que se utiliza para enumerar los valores discretos
de
k; V es el volumen del sistema, el cual aparece en forma de factor de
normalizacion.
La ortogonalidad de las exponenciales en todo el volumen se puede enunciar
mediante la relaci on
1
V
_
e
i
_
_
.r
dV =
k,k
. (60)
En realidad, los valores permitidos de k son aquellos para los cuales se
satisface la condici on (60), y los coecientes q
k
(t) est an dados por
q
k
(t) =
1
V
1/2
_
e
i
r
(
r , t) dV . (61)
De manera an aloga para la densidad de cantidad de movimiento can onica
tenemos
(
r , t) =
1
V
1/2
k
p
k
(t) e
i
r
(62)
con p
k
(t) denido como
p
k
(t) =
1
V
1/2
_
e
i
r
(
r , t) dV . (63)
Tanto q
k
como p
k
son cantidades integrales. Podemos, pues, buscar los
corchetes de Poisson de dichas cantidades. Como las exponenciales no con-
tienen las cantidades campo tenemos, por la ecuaci on (54)
_
q
k
, p
k
=
1
V
_
dV e
i
r
_
_
=
1
V
_
dV e
i
r
o sea, por la ecuaci on (60),
_
q
k
, p
k
=
k,k
. (64)
De la denicion de los corchetes de Poisson resulta evidente que
_
q
k
, q
k
=
_
p
k
, p
k
= 0 . (65)
La dependencia temporal de q
k
se hallar a a partir de
.
q
k
(t) = [q
k
, H] =
1
V
1/2
_
dV e
i
r
_
_
133
o sea
.
q
k
(t) =
1
V
1/2
_
e
i
r
H
. (66)
Por otra parte, tenemos que
H
p
k
=
_
dV
H
p
k
(67)
por lo que obtenemos
p
k
=
1
V
1/2
e
i
r
. (68)
Comparando las ecuaciones (67) y (66) tenemos
.
q
k
(t) =
H
p
k
. (69)
De manera similar podemos obtener la ecuaci on de movimiento para p
k
.
p
k
=
H
q
k
. (70)
As las cantidades p
k
y q
k
, obedecen pues, las ecuaciones de movimiento de
Hamilton.
11.4 Teorema de Noether
Ya hemos visto m ultiples veces que las propiedades de la Lagrangiana (o de
la Hamiltoniana) implican la existencia de cantidades conservativas. As,
si la Lagrangiana no contiene explcitamente una coordenada particular
de desplazamiento, se conserva la correspondiente cantidad de movimiento
can onica. La ausencia de dependencia explcita de la coordenada signica
que la Lagrangiana no queda afectada por una transformacion que altere el
valor de dicha coordenada; se dice que es invariante o es simetrica ante la
transformacion dada.
La simetra ante una transformacion de coordenadas se reere a los efectos
de una transformacion innitesimal de la forma
x
= x
+x
, (71)
donde la variaci on x
puede ser funcion de las dem as x
. El teorema de
Noether considera tambien el efecto de una transformacion de las propias
cantidades campo, la cual podemos escribir en la forma
(x
_
x
_
=
_
x
_
+
_
x
_
. (72)
Aqu
_
x
_
mide el efecto de las variaciones de x
y de
y puede ser
funcion de las dem as cantidades campo
. La variaci on de una de las vari-
ables campo en un punto particular del espacio x
es una cantidad diferente
_
x
_
=
_
x
_
+
_
x
_
. (73)
134
La descripcion de las transformaciones en funcion de varaiaciones innitesi-
males a partir de las cantidades no transformadas nos indica que solo estamos
tratando con transformaciones continuas. As la simetra ante la inversi on
en tres dimenciones no ser a una de las simetras a las que se pueda aplicar
el teorema de Noether. A consecuencia de las transformaciones tanto de
las coordenadas como de las cantidades campo, la lagrangiana aparecera, en
general, como funcion diferente de las variables campo y de las coordenadas
del espacio y tiempo:
L
_
_
x
_
,
,
_
x
_
, x
_
L
_
x
_
,
,
_
x
_
, x
_
. (74)
La versi on del teorema de Noether que vamos a presentar no constituye
la forma m as general posible pero facilita la deduccion sin restringir de
manera importante el ambito de aplicaci on del teorema ni la utilidad de las
conclusiones. Supondremos que se cumplen tres condiciones:
1. El cuadriespacio es eucldeo. Este requisito, restringe el espacio-tiempo
relativista al espacio de Minkowski, que es complejo pero euclideo.
2. La densidad de lagrangiana presenta la misma forma funcional para las
cantidades transformadas que para las cantidades originales, es decir,
L
_
x
_
,
,
_
x
_
, x
_
= L
_
_
x
_
,
,
_
x
_
, x
_
. (75)
3. La magnitud de la integral de accion es invariante ante la transfor-
maci on, es decir,
I
_
dx
_
L
_
x
_
,
,
_
x
_
, x
_
=
_
L
_
_
x
_
,
,
_
x
_
, x
_
.
(76)
La combinaci on de las ecuaciones (75) y (76) nos da el requisito
_
_
dx
_
L
_
_
x
_
,
,
_
x
_
, x
L
_
_
x
_
,
,
_
x
_
, x
_
= 0 .
(77)
De la condici on de invariancia, la ecuaci on (77) adopta la forma
_
dx
L
_
, x
dx
L
_
, x
_
(78)
=
_
dx
_
L
_
, x
_
L
_
, x
_
_
+
_
s
L() x
dS
= 0 .
Aqu L
_
, x
_
es una abreviatura de la dependencia funcional total, S es la
supercie tridimensional de la regi on y x
es de hecho el vector diferencia
entre puntos de S y los puntos correspondientes de la supercie transfor-
mada S
. La ultima integral se puede transformar mediante el teorema de
135
la divergencia cuadridimensional con lo que tendremos para la condici on de
invarianza
0 =
_
dx
_
_
L
_
, x
_
L
_
, x
_
_
+
d
dx
_
L
_
, x
_
x
_
_
. (79)
Ahora usando la ecuaci on (73), el termino entre los corchetes puede escribirse
en primera aproximacion en la forma
L
_
_
x
_
,
,
_
x
_
, x
_
L
_
_
x
_
,
,
_
x
_
, x
_
=
L
+
L
,
.
Utilizando las ecuaciones de campo de Lagrange
L
_
, x
_
L
_
, x
_
=
d
dx
_
L
_
.
Luego la condici on de invarianza (79) aparece en la forma
_
_
dx
_ d
dx
_
L
Lx
_
= 0, (80)
que ya tiene la forma de una ecuaci on de corriente conservativa.
Sin embargo resulta util desarrollar algo m as la condici on especicando la
forma de la transformacion innitesimal en funcion de R par ametros in-
nitesimales
r,
r = 1, 2, ..., R, tales que las variaciones de x
sean
lineales en los
r
:
x
=
r
X
r
,
=
r
r
. (81)
Sustituyendo estas condiciones en la ecuaci on (80) obtenemos
_
r
d
dx
__
L
,
L
_
X
r
r
_
_
dx
_
= 0 .
Como los par ametros
r
son arbitrarios, existen r corrientes conservativas
con teoremas de conservacion diferenciales:
d
dx
__
L
,
L
_
X
r
r
_
= 0 . (82)
Las ecuaciones (82) constituyen la principal conclusion del teorema de Noether,
el cual dice pues, que si el sistema tiene propiedades de simetra tales que se
cumplan las condiciones (1) y (2) para transformaciones del tipo indicado
en las ecuaciones (81), existiran r cantidades conservativas.
BIBLIOGRAFIA COMPLEMENTARIA
R.D. Kamien, Poisson bracket formulation of nematic polymer dynamics,
cond-mat/9906339 (1999)
136
También podría gustarte
- Resumen Derecho Constitucional Pablo DermizakyDocumento54 páginasResumen Derecho Constitucional Pablo Dermizakyrolando91% (22)
- Propone Bases de Remate PDFDocumento3 páginasPropone Bases de Remate PDFAlejandraPalmaPAún no hay calificaciones
- Dif FinDocumento7 páginasDif FinVíctor ManuelAún no hay calificaciones
- Cohete PDFDocumento5 páginasCohete PDFFINTA2006Aún no hay calificaciones
- Oriflame Código de Conducta EspañolDocumento17 páginasOriflame Código de Conducta EspañolPP100% (1)
- Principio de HamiltonDocumento7 páginasPrincipio de HamiltonJuanchis EBAún no hay calificaciones
- Laboratorio Movimiento Armonico 2Documento27 páginasLaboratorio Movimiento Armonico 2cayetano berrocal leonAún no hay calificaciones
- Documento - Simetrias y Cantidades Conservadas en Fisica CuanticaDocumento12 páginasDocumento - Simetrias y Cantidades Conservadas en Fisica Cuanticapldojcc ccAún no hay calificaciones
- Ecuaciones de LagrangeDocumento9 páginasEcuaciones de LagrangeAlejandro CardenasAún no hay calificaciones
- Práctica Blended Sobre Movimiento Armónico SimpleDocumento11 páginasPráctica Blended Sobre Movimiento Armónico SimpleWilhelm PardeyAún no hay calificaciones
- Cap Itulo 3 Geometr Ia RiemannianaDocumento7 páginasCap Itulo 3 Geometr Ia Riemanniananimberge mouinskepAún no hay calificaciones
- Transformaciones de Legendre y EcuacioneDocumento6 páginasTransformaciones de Legendre y EcuacioneAndersson De La CruzAún no hay calificaciones
- MicrocanicoDocumento6 páginasMicrocanicoElisa RaúlAún no hay calificaciones
- Leyes de KeplerDocumento7 páginasLeyes de KeplerJaime JaramilloAún no hay calificaciones
- Fabian Bucheli Fisica 3acontabildadDocumento11 páginasFabian Bucheli Fisica 3acontabildadAlexander BasurtoAún no hay calificaciones
- FismodantDocumento8 páginasFismodantALDO MAYME MARTINEZAún no hay calificaciones
- Modulo 2 PDFDocumento27 páginasModulo 2 PDFAlejandroAún no hay calificaciones
- Lagrange (OgataSistemasDinamicosApendiceC)Documento12 páginasLagrange (OgataSistemasDinamicosApendiceC)Flor Edith González PatricioAún no hay calificaciones
- Proyecto - Lagrange y HamiltonDocumento6 páginasProyecto - Lagrange y HamiltonOmar VelascoAún no hay calificaciones
- Informe 2 - MasDocumento7 páginasInforme 2 - MasALVEIRO CUAICALAún no hay calificaciones
- Notas de Mecánica CuánticaDocumento38 páginasNotas de Mecánica CuánticaCesar CarrilloAún no hay calificaciones
- FACULTAD DE INGENIERÍA DE MINAS ArregladoDocumento28 páginasFACULTAD DE INGENIERÍA DE MINAS ArregladoOliver Edwin Santos FerrerAún no hay calificaciones
- Laboratorio #7 Pendulo Simple - BI010102EDocumento9 páginasLaboratorio #7 Pendulo Simple - BI010102EWilliam Jesus Cabrera MezaAún no hay calificaciones
- Tarea 2Documento5 páginasTarea 2roberto rojasAún no hay calificaciones
- Introducción MECANICA LAGRANGEIANADocumento10 páginasIntroducción MECANICA LAGRANGEIANASarita Sanchez ApolitanoAún no hay calificaciones
- Fisica ConsultaDocumento10 páginasFisica ConsultaAlexander BasurtoAún no hay calificaciones
- Informe Fisica Labo 3 Laboratorio de Fisica I No3investigando Un Fenomeno de La NaturalezamovimientoDocumento23 páginasInforme Fisica Labo 3 Laboratorio de Fisica I No3investigando Un Fenomeno de La NaturalezamovimientoGuadalupe Chantal Angulo BerrospiAún no hay calificaciones
- Introducción A La Teoría de CuerdasDocumento40 páginasIntroducción A La Teoría de CuerdasOsvaldo Orellana100% (1)
- Curso de Ondas y Optica - Cerp Centro: 1 Sistemas Oscilatorios de Un Grado de LibertadDocumento6 páginasCurso de Ondas y Optica - Cerp Centro: 1 Sistemas Oscilatorios de Un Grado de LibertadGastón HugoAún no hay calificaciones
- Modelos de Sistemas Mecánicos-Empleo Del LagrangianoDocumento26 páginasModelos de Sistemas Mecánicos-Empleo Del LagrangianopepenitoAún no hay calificaciones
- Práctica Blended Sobre Movimiento Armónico SimpleDocumento7 páginasPráctica Blended Sobre Movimiento Armónico SimpleEnmanuel 145Aún no hay calificaciones
- Monografía 3 - Formulación Langrangiana de La MecánicaDocumento4 páginasMonografía 3 - Formulación Langrangiana de La MecánicaMarcos Javier Rojas FloresAún no hay calificaciones
- Tarea Oscilaciones 3Documento5 páginasTarea Oscilaciones 3Juan Carlos Morales ParraAún no hay calificaciones
- Trabajo Ecuaciones de Tercer GradoDocumento32 páginasTrabajo Ecuaciones de Tercer GradoCarlos TelloAún no hay calificaciones
- Ecuaciones Diferenciales Ordinarias Como Modelos Matemã TicosDocumento19 páginasEcuaciones Diferenciales Ordinarias Como Modelos Matemã TicosJose Raul Caparroso SamudioAún no hay calificaciones
- Sistemas ElectromecanicosDocumento57 páginasSistemas Electromecanicoselectrotecnia_tvpcAún no hay calificaciones
- Investigacion EcuacionesDiferencialesDocumento13 páginasInvestigacion EcuacionesDiferencialesYahir HernandezAún no hay calificaciones
- Formalismo Lagrangiano 2 10Documento9 páginasFormalismo Lagrangiano 2 10hugo lans vega salasAún no hay calificaciones
- Mecánica Lagrangiana y HamiltonianaDocumento45 páginasMecánica Lagrangiana y HamiltonianaleenivramAún no hay calificaciones
- Oscilador Armonico SimpleDocumento9 páginasOscilador Armonico SimpleAna PradaAún no hay calificaciones
- Cohete SLIDESDocumento17 páginasCohete SLIDESKarlsefni TodAún no hay calificaciones
- Laboratorio Virtual Pendulo SimpleDocumento3 páginasLaboratorio Virtual Pendulo SimpleSergio Villalobos Flórez100% (1)
- Comparto 'EJE 2 COLABORATIVO 2021 Areandina' Con UstedDocumento21 páginasComparto 'EJE 2 COLABORATIVO 2021 Areandina' Con UstedDayana SáenzAún no hay calificaciones
- Guia 3 de Ejercicios Fisica MecanicaDocumento4 páginasGuia 3 de Ejercicios Fisica MecanicaSCARLETTAún no hay calificaciones
- 1 - ClaseDocumento6 páginas1 - Clasecandelamanattini2000Aún no hay calificaciones
- Guia de Labo Fisica II UnacDocumento51 páginasGuia de Labo Fisica II UnacGabriela Garcia AranaAún no hay calificaciones
- Cap 06Documento26 páginasCap 06r24pilyAún no hay calificaciones
- Derivadas ParcialesDocumento33 páginasDerivadas ParcialesEdgar CoetoAún no hay calificaciones
- Péndulo HuygensDocumento7 páginasPéndulo HuygensAlonso-GuerreroAún no hay calificaciones
- GUIA LAB II Oscilaciones - Rev LJ - EADocumento17 páginasGUIA LAB II Oscilaciones - Rev LJ - EAValesska SánchezAún no hay calificaciones
- Trabajo de KarlaDocumento36 páginasTrabajo de Karlaviviananatali2009100% (2)
- MT 18 20Documento3 páginasMT 18 20carloAún no hay calificaciones
- Leyes de Kepler Deducidas A Partir de Leyes de NewtonDocumento10 páginasLeyes de Kepler Deducidas A Partir de Leyes de NewtonHeidy Mayerly QuitianAún no hay calificaciones
- Librito de Mecánica ClásicaDocumento9 páginasLibrito de Mecánica ClásicaAdán GonzálezAún no hay calificaciones
- Física cuántica y relativista: Más allá de nuestros sentidosDe EverandFísica cuántica y relativista: Más allá de nuestros sentidosAún no hay calificaciones
- La teoría del caos: Las leyes de lo impredecibleDe EverandLa teoría del caos: Las leyes de lo impredecibleAún no hay calificaciones
- Convenio HeladerosDocumento20 páginasConvenio HeladerosNatalia CentenoAún no hay calificaciones
- Demanda Final.Documento10 páginasDemanda Final.Patricia GrazaAún no hay calificaciones
- Ensayo Sobre El Derecho A La VidaDocumento4 páginasEnsayo Sobre El Derecho A La VidakevinAún no hay calificaciones
- Valor de Los DocumentosDocumento2 páginasValor de Los DocumentosIgnacio Herrera SierraAún no hay calificaciones
- Cuadro de TimbresDocumento6 páginasCuadro de TimbresKAREN JOHANA CHEX VASQUEZ100% (1)
- Actividad 9 - Aprendiendo de Operaciones de Impuestos - IVADocumento11 páginasActividad 9 - Aprendiendo de Operaciones de Impuestos - IVAErika Anruth Martinez Lopez100% (1)
- AUTODocumento2 páginasAUTOC Condor LucchiniAún no hay calificaciones
- Congreso de La Republica Transportes Y Comunicaciones: 2 Poder Legislativo Poder EjecutivoDocumento2 páginasCongreso de La Republica Transportes Y Comunicaciones: 2 Poder Legislativo Poder EjecutivoAli Romina Jeraldine PérezAún no hay calificaciones
- Razon de Cierre ProtocoloDocumento11 páginasRazon de Cierre ProtocoloBalloleth Ralac100% (1)
- Reglamento de Poderes Del Banco de La NaciónDocumento9 páginasReglamento de Poderes Del Banco de La NaciónLuis Rolando Carreño PerezAún no hay calificaciones
- 11FEB Obligaciones Fiscales Administrativas AIRBNBDocumento157 páginas11FEB Obligaciones Fiscales Administrativas AIRBNBCristobal PerezAún no hay calificaciones
- Prueba TestimonialDocumento5 páginasPrueba TestimonialYamil RojoAún no hay calificaciones
- Perejil 4Documento1 páginaPerejil 4Kika Centeno MalavéAún no hay calificaciones
- Gaceta-0071-2020-1 PREFECTURA GUAYASDocumento116 páginasGaceta-0071-2020-1 PREFECTURA GUAYASYuliana CastroAún no hay calificaciones
- Funpres 3 GradoDocumento21 páginasFunpres 3 GradoIris Flores-Mulato100% (2)
- Modelo de Contrato de LocacionDocumento2 páginasModelo de Contrato de LocacionPedro HooAún no hay calificaciones
- Baldivieso FALLO ResumenDocumento4 páginasBaldivieso FALLO ResumenPablo LernerAún no hay calificaciones
- Bases para Diseño de Puentes Mop-2008Documento51 páginasBases para Diseño de Puentes Mop-2008pegasso25850% (1)
- Sentencia CivilDocumento28 páginasSentencia CivilPablo SeguraAún no hay calificaciones
- Advertencia e Intimacion Maria Margarita Cantera MartinezDocumento5 páginasAdvertencia e Intimacion Maria Margarita Cantera MartinezMARKINGAún no hay calificaciones
- Seniat Declaracion Sucesiones 07 - InstructivoDocumento21 páginasSeniat Declaracion Sucesiones 07 - InstructivoGriselda Carrillo MAún no hay calificaciones
- Convenio de CooperaciónDocumento8 páginasConvenio de CooperaciónIvonne VásconezAún no hay calificaciones
- 28Documento7 páginas28Juan JoseAún no hay calificaciones
- Boe LeyDocumento2 páginasBoe LeyEleanor MerchanAún no hay calificaciones
- Cuestionario SercopDocumento5 páginasCuestionario SercopRichard BarrosoAún no hay calificaciones
- Casación Laboral #13634/2015-MOQUEGUADocumento2 páginasCasación Laboral #13634/2015-MOQUEGUALa LeyAún no hay calificaciones
- 00 Estructura Organica Del Derecho ComercialDocumento18 páginas00 Estructura Organica Del Derecho ComercialMiguel Angel Rodriguez Urbina33% (3)