Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Estabilidad Longitudinal
Cargado por
martinsandovalandresDerechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Estabilidad Longitudinal
Cargado por
martinsandovalandresCopyright:
Formatos disponibles
1
AERODINAMICA GENERAL I
Estabilidad Esttica
Considrese un avin en vuelo recto y nivelado, con el viento (producto del movimiento del
avin con respecto al aire) incidiendo frontalmente sobre el avin..
Considrese que en un dado instante ese avin es perturbado en su movimiento de tal forma
de comenzar por ejemplo una trayectoria ascendente.
Por inercia el avin continuar durante un tiempo (normalmente pequeo) con su trayectoria
original, pero debido a la perturbacin de cabeceo ya no recibir el movimiento en forma
frontal sino con un ngulo de ataque (impuesto por la perturbacin) actuando sobre todo el
cuerpo de la aeronave: fuselaje, ala, motores, timones.
El anlisis de estabilidad estudia la respuesta del avin a esas condiciones producidas
precisamente por una perturbacin. Lo mismo ocurre para un guio o un rolido.
Un avin es estable cuando despus de haber experimentado una perturbacin en su
movimiento retorna por si mismo a su estado original o al menos exhibe una tendencia a
retornar por si solo a ese estado de movimiento original previo a la perturbacin. Este
comportamiento es el resultado de fuerzas restitutivas debidas a la accin aerodinmica sobre
el avin durante los instantes en que se encuentra embestido por un viento oblicuo debido al
cambio de actitud producido por la perturbacin. La perturbacin en el movimiento puede
deberse a causas externas como rfagas y vrtices o a causas propias del avin como la
actuacin de timones, de alerones, de potencia motriz, sbita prdida de peso (avin
bombero, bombardero), etc.
De aqu puede deducirse que un avin muy estable no solo tratar de oponerse a los cambios
de actitud inducidos por solicitaciones atmosfricas sino tambin a los cambios que intenta
producir el piloto a travs del accionamiento de comandos. Aviones muy estables responden
mucho ms lentamente a los comandos.
Aviones de combate, y aviones acrobticos se disean con estabilidades mnimas o hasta con
ciertas inestabilidades (por ejemplo diedro negativo) para asegurar muy rpidas respuestas a
la accin de comandos. Lgicamente esto los hace ms difciles de pilotear requiriendo
continuas correcciones. En modernas aplicaciones aeronuticas militares una parte importante
de ese trabajo de pilotear un avin inestable es asumida por pilotos automticos
computarizados. Existen aviones que solo son piloteables con este tipo de ayuda.
El ingeniero aeronutico seleccionar el nivel de estabilidad adecuado al tipo de aeroplano y
al tipo de misin: un avin particular que puede ser piloteado por personas mayores con
reacciones mucho ms lentas que un joven deber ser bastante estable. Un avin
excesivamente estable puede ser peligroso.
Imaginemos un piloto fumigando un campo que por un descuido momentneo se encuentra
sorpresivamente ante una barrera de altos eucaliptos y acciona velozmente el timn de
profundidad para pasar por encima de ellos. Una reaccin demasiado lenta podra producir un
accidente.
Ahora en lugar de considerar al avin en vuelo recto y nivelado imaginemos dos situaciones
diferentes:
a) El aeroplano est ejecutando un viraje escarpado con velocidad y ngulo de
inclinacin constante.
b) El avin se encuentra en un tirabuzn a velocidad constante.
2
Para esas dos condiciones tambin podramos utilizar el concepto de estabilidad citado. El
avin es estable si despus de experimentar una perturbacin retorna por s solo al estado
original.
Si por ejemplo un avin se enrosca en un tirabuzn resulta vital que esta actitud de vuelo no
sea tan estable como para que ninguna accin de comando lo pueda sacar de ella. Para vuelo
recto y nivelado deseamos frecuentemente un nivel de estabilidad, en plena maniobra o
actitud acrobtica solemos desear otro nivel de estabilidad.
La estabilidad esttica describe la tendencia de un avin en vuelo uniforme y estacionario a
retornar a una condicin previa de trimado despus de haber sido perturbado.
El concepto de estabilidad esttica no considera la naturaleza de los movimientos que el avin
ejecuta luego de ser perturbado, sino esencialmente la tendencia inmediata a volver al estado
original previo a la perturbacin.
Resulta muy probable que configuraciones aeronuticas convencionales estticamente
estables tambin demuestren una estabilidad dinmica aceptable para muchas actitudes de
vuelo, pero es altamente recomendable efectuar los correspondientes estudios y sobre todo
ensayos en vuelo.
Figura 1
3
Es tambin posible que un avin pueda llegar a tener un movimiento giratorio (de guio por
ejemplo) tan intenso que no pueda ser controlado por ningn comando. Ello ocurre en algunos
maniobras extremas de aviones militares durante sus vuelos de prueba; los cuales para
recuperar el control en esas actitudes cuentan con un paracadas balstico (inmediatamente
desechable) que frena toda la aeronave.
La naturaleza y caractersticas de los movimientos que el avin ejecuta y las actitudes que
adopta luego de ser perturbado son estudiadas por la estabilidad dinmica.
La estabilidad dinmica involucra el conocimiento de los estados y actitudes variables en el
tiempo por los que pasa un aeroplano luego de ser perturbado.
As cuando las fuerzas restitutivas resultan excesivas el avin sobrepasar la posicin corres-
pondiente a su estado original, oscilando con una amplitud creciente configurando una actitud
difcil y hasta imposible de controlar.
En ese caso el avin a pesar de ser estticamente estable resultar dinmicamente inestable.
De aqu puede deducirse que un avin estticamente estable puede NO ser dinmicamente
estable.
Sin embargo un avin estticamente inestable ser asimismo dinmicamente inestable.
Estabilidad esttica es por lo tanto una condicin necesaria pero no suficiente para asegurar la
estabilidad dinmica.
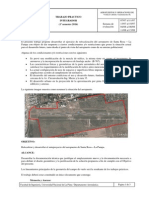
La Figura 1 describe lo expuesto para un avin que recibi una perturbacin en cabeceo.
(a) corresponde a un estado de equilibrio neutral: el avin en vuelo ascendente a un cierto
ngulo recibe una perturbacin que incrementa su ngulo de ascenso. El avin no retorna al
estado previo a la perturbacin; simplemente prosigue su movimiento al nuevo ngulo.
(b) corresponde a un avin estticamente inestable. Las fuerzas y momentos que aparecen
luego de una perturbacin que incrementa el ngulo de trepada lo incrementan an ms.
(c) corresponde aun avin estticamente estable con gran amortiguamiento. Luego de la
perturbacin el avin retorna gradualmente (lentamente) a su estado original sin sobrepasarlo
ni oscilar.
(d) se observa un estado ms frecuente de respuesta: el retorno al estado original a travs de
una oscilacin convergente. Si el tiempo de convergencia es corto tal comportamiento puede
resultar aceptable. Es sin embargo preciso tener en cuenta los tiempos de reaccin de un ser
humano a fin de que no suceda un fenmeno de realimentacin positiva a travs de la accin
de los comandos que convierta al avin en una aeronave difcil de pilotear.
(e) las fuerzas y momentos restitutivos actan en la direccin correcta lo que implica
estabilidad esttica. Sin embargo las fuerzas y momentos resultan excesivos o bien los efectos
amortiguantes son demasiado pequeos por lo que el avin sobrepasa su estado original en un
movimiento progresivamente divergente, que puede resultar extremadamente peligroso.
Obviamente el caso expuesto demuestra la existencia de estabilidad esttica pero demuestra
asimismo la notoria inexistencia de estabilidad dinmica.
Cuanto mayor sea la estabilidad de un avin ms tiempo y esfuerzo requerir sacarlo de un
estado dado, por ejemplo vuelo recto y nivelado para comenzar una determinada maniobra:
viraje o vuelo ascendente o picada, etc.
Por lo expuesto el grado de estabilidad de un avin resulta de asumir un compromiso entre
los diferentes factores de diseo. Es interesante destacar que si una inestabilidad ocurre muy
4
lentamente puede resultar aceptable. Resulta inesperado para el estudiante enterarse de que la
mayora de los aviones poseen una inestabilidad dinmica inherente conocida como
"divergencia espiral".
En vuelo recto uniforme y nivelado, si no se accionan los comandos, la mayora de los
aviones comenzarn lenta y progresivamente a bajar un ala (elevando la otra) comenzando un
proceso progresivo de viraje cada vez ms cerrado y escarpado.
Un piloto sin instrumentos que le indiquen la posicin del horizonte, puede entrar en una
nube, en un vuelo sin visibilidad.
Al sentir aceleraciones actuantes en forma lateral, con la finalidad de limitar el deslizamiento
el piloto comenzar a virar sin darse cuenta cada vez ms escarpado y cerrado terminando en
situaciones de vuelo acrobtico: virajes escarpados que ya no ocurren en planos horizontales
sino en planos progresivamente inclinados que culminan en verdaderos loopings.
Las elevadas cargas aerodinmicas pueden exceder la capacidad estructural del avin
provocando su destruccin. Los pilotos noveles generalmente desconocen la existencia de esta
muy lenta "divergencia espiral" por cuanto introducen automticamente las correcciones de
vuelo correspondientes al mismo tiempo de compensar los desvos producidos por las rfagas.
Sistemas de coordenadas.
La Figura 2 ilustra el sistema de coordenadas (directo) solidario al avin y por lo tanto
movindose con el avin, con origen en su centro de gravedad.
Figura 2
El eje x est dirigido haca adelante, el eje y ubicado de tal modo que en vuelo nivelado a
travs de una terna directa (al girar el eje "x" en la direccin de un tornillo que se ajusta hacia
el eje "y" resulta que "z" avanza hacia abajo en vuelo nivelado).
X, Y, Z, seran las fuerzas en la direccin de los respectivos ejes.
L, M, N, son habitualmente denominados los momentos con respecto a esos ejes.
P, Q, R son habitualmente denominadas las velocidades angulares alrededor de los ejes x, y,
z.
El movimiento alrededor del eje x es llamado de rolido (rolling).
El movimiento alrededor del eje y es llamado de cabeceo (pitching).
El movimiento alrededor del eje z es llamado de guiada (yawing).
La mayora de los aeroplanos son simtricos con respecto al plano x, z, que resulta entonces
un plano de simetra. Los movimientos en el plano de simetra pueden a veces ser
5
desacoplados de los movimientos del plano de simetra. El anlisis de los movimientos en el
plano de simetra es llamado anlisis de estabilidad longitudinal y comprenden los movimien-
tos a lo largo de los ejes "x" y "z" adems de las rotaciones alrededor del eje "y" (cabeceo).
El anlisis de los movimientos del plano de simetra es llamado anlisis del movimiento
lateral comprendiendo los movimientos a lo largo del eje "y" y las rotaciones angulares
alrededor de los ejes "x" y "z".
Estabilidad Esttica Longitudinal con mandos bloqueados.
Mandos bloqueados implica mantener el bastn de mando y los pedales fijos, impidiendo el
movimiento de las correspondientes superficies de control. En realidad estas superficies:
alerones, partes mviles del timn de profundidad y de direccin pueden moverse algo, an
con mandos bloqueados, debido a la elasticidad de las componentes del sistema de
transmisin de movimiento. Hay casos en que resulta necesario introducir en las ecuaciones
de estabilidad trminos que consideren precisamente esos movimientos.
Las fuerzas y momentos actuantes en este caso estn ilustrados en la Figura 3.
Figura 3
Se asume que el ala y su estabilizador se representan por sus cuerdas aerodinmicas medias,
sobre las que se encuentran el centro aerodinmico con respecto al cual el coeficiente de
momento de cabeceo del ala no vara con la variacin de ngulos de ataque y el centro de
presin en donde estn ubicadas las fuerzas de sustentacin y la resistencia.
La sustentacin positiva o negativa del estabilizador (timn de profundidad) actuando a una
apreciable distancia del centro de gravedad del avin genera los momentos para equilibrar y
controlar las rotaciones (cabeceos) alrededor del eje y, contrarrestando el momento de
cabeceo del ala, del fuselaje, de los motores, del tren de aterrizaje, etc.
El fuselaje y las nacellas de los motores producen momentos de cabeceo difciles de estimar
tericamente sin adecuados (e imprescindibles) datos experimentales de vuelo y tnel.
El aporte de todos estos momentos al momento total actuante en el centro de gravedad del
avin ser:
T FN M w
CG CG CG CG
CG
M +
M
+
M
+
M
=
M
en donde:
M
CGw
: Momento respecto del CG del avin producido por la accin aerodinmica del ala.
6
M
CGFN
:Momento respecto del CG del avin producido por la accin aerodinmica del
fuselaje y nacellas.
M
CGM
: Momento respecto del CG del avin producido por la accin aerodinmica de
propulsin de los motores.
M
CGT
: Momento respecto del CG del avin producido por la accin aerodinmica del
empenaje horizontal (timn de profundidad).
Esta sumatoria debe ser cero para el estado de equilibrio esttico. Resulta conveniente
adimensionalizar estas ecuaciones y trabajar en funcin de los correspondientes coeficientes.
Dividiendo la ecuacin por
c
S
q
w
en donde: q: es la presin dinmica sobre el ala.
S
w
: superficie alar.
c: cuerda media
Definiendo:
C
S
q
M
=
C
w
M
Se obtiene
T
M
M M M M
C
+
C
+
C
+
C
=
C
M FN w CG
El avin estar en equilibrio esttico longitudinal cuando la pendiente de la derivada de C
MCG
sea negativa.
Figura 4
La Figura 4 indica dos posibles comportamientos radicalmente diferentes para la variacin del
coeficiente de momento de cabeceo en funcin del ngulo de ataque.
7
Figura 5
Supongamos que un aeroplano est trimado (en equilibrio) en el punto A de la curva de la
Figura 5 cuando bruscamente es perturbado, por ejemplo por una rfaga, de tal manera que su
ngulo de ataque aumenta hasta el punto A'.
Si la pendiente de la curva fuese positiva puede observarse que A' corresponde al punto B
sobre la curva que implica un coeficiente de momento positivo que tiende a levantar la nariz
del avin, aumentando an ms el ngulo de ataque. Esto configura obviamente una situacin
inestable. Si la pendiente de la curva fuese negativa el incremento de ngulo de ataque
producido por la perturbacin A' se corresponde con el punto C que a travs de un coeficiente
de momentos de cabeceo negativo tiende a bajar la nariz, reduciendo el ngulo de ataque,
mostrando una tendencia de retorno al estado original A.
Se aprecia por lo tanto que el requerimiento de estabilidad impone una pendiente negativa.
Pero, cun grande? un pequeo valor negativo o un gran valor negativo? (Recurdese lo
expresado respecto a aviones demasiado estables que respondan muy lentamente a la accin
de los comandos y aviones poco estables que resultan muy fatigosos de pilotear, sin auxilio de
sistemas electrnicos de piloteado automtico).
Estos momentos estn influenciados por la conformacin aerodinmica alrededor del ala (en
especial el upwash y el downwash) alteradas por la presencia del fuselaje, cargas externas,
etc. De acuerdo a su ubicacin y orientacin los motores pueden asimismo contribuir al
momento de cabeceo.
Consideraciones acerca del posicionamiento del empenaje vertical.
La configuracin de la aeronave puede ser de diferentes tipos, como ser ala alta, ala baja, ala
media ala delta, y los empenajes de cola pueden ser del tipo en T, convencionales,
cruzados, en V, canard, etc.
El empenaje vertical resulta fundamental para poder salir de un tirabuzn. Una aeronave en
actitud de tirabuzn est realizando un movimiento de rotacin alrededor de un eje vertical
con fuertes deslizamientos laterales, mientras cae verticalmente, en condiciones de flujo
totalmente separado sobre el ala.
Una salida del tirabuzn implica lograr nuevamente una condicin de flujo adherido en el ala.
Para ello resulta en primer trmino reducir la rotacin y el deslizamiento lateral del aeroplano.
Ello requiere que el timn de direccin sea efectivo an durante los grandes ngulos de ataque
vigentes en un tirabuzn.
8
La Figura 6 ilustra el efecto de diversas disposiciones de la cola sobre el control del timn de
direccin a grandes ngulos de ataque.
Figura 6
A grandes ngulos de ataque el estabilizador horizontal presenta un flujo totalmente separado
cuya estela se extiende hacia arriba en un ngulo de aproximadamente 45.
La primera imagen de la Figura 6 muestra que el empenaje vertical est casi totalmente en la
estela de flujo separado del estabilizador horizontal. El resultado ser una apreciable falta de
control de direccin. La segunda imagen muestra el efecto de mover hacia la proa el
estabilizador con respecto al empenaje vertical. Una pequea parte del timn de direccin
queda fuera de la estela permitiendo un mnimo control. La prxima imagen ilustra resultados
similares para un corrimiento hacia popa del estabilizador. Las siguientes dos imgenes
ilustran el efecto de elevar el sitio de implantacin del estabilizador horizontal. La cola en T
libera totalmente al empenaje de la estela pero puede causar indeseables y peligrosos efectos
de cabeceo ascendente (nariz arriba).
La ltima imagen muestra los efectos de aletas ventrales y dorsales. La aleta dorsal superior
provoca durante el deslizamiento lateral un vrtice en la regin de succin, el cual al
proyectarse sobre el timn de direccin energiza la capa lmite readhiriendo parte del flujo y
logrando cierto nivel de control. La aleta ventral contribuye de igual modo con la ventaja
adicional de no encontrarse sumergida en estela alguna.
Consideraciones acerca de la geometra de la cola.
La superficie de cola de todos los aviones resulta proporcional a las respectivas superficies
alares.
Los alargamientos y ahusamientos normalmente empleados varan poco para tipos muy
diferentes de aeronaves. La tabla ilustrada puede tomarse como gua orientadora para trabajos
de diseo.
9
Tabla de valores para el
Alargamiento y ahusamiento de la cola
--------------------------------------------------------------------------------------------------
Estabilizador Deriva Vertical
--------------------------------------------------------------------------------------------------
A A
--------------------------------------------------------------------------------------------------
Avin de caza 3-4 0,2-0,4 0,6-1,4 0,2-0,4
Planeador 6-10 0,3-0,5 1,5-2 0,4-0,6
Otros 3-5 0,3-0,6 1,3-2 0,3-0,6
Cola en T - - 0,7-1,2 0,6-1
Las colas en T presentan menores alargamientos en el empenaje vertical a fin de disminuir el
mayor peso estructural debido a la ubicacin del estabilizador horizontal. Muchos aviones de
uso general utilizan estabilizadores horizontales rectangulares (sin ahusamiento) para reducir
costos de fabricacin.
La flecha de los bordes de ataque de los estabilizadores horizontales es usualmente 5 mayor
que la del ala a fin de asegurar que el estabilizador entre en prdida despus del ala y lograr
un mayor Mach crtico para la cola.
La flecha de los empenajes verticales vara entre 35 y 55.
Para aeronaves lentas no existen razones aerodinmicas para utilizar en el empenaje vertical
flechas mayores de 20.
Figura 7
La relacin de espesor de la cola suele ser similar a la del ala. Para aviones veloces se suele
preferir un empenaje vertical con una relacin de espesores 10 menor que la del ala para
asegurar un mayor Mach crtico para la cola.
El empenaje vertical normalmente no es diseado sobre la base de meras condiciones de
estabilidad esttica direccional.
El mnimo tamao admisible para el empenaje vertical surge a travs de condicionamientos
de control como por ejemplo la parada de un motor en una configuracin bimotor y/o
10
condicionamientos tales como la obtencin de aceptables niveles de control bajo extremos
ngulos de ataque, o para "sacar" la aeronave de una condicin de vuelo particular: tirabuzn,
viraje escarpado con prdida asociada, etc.
Figura 8
La Estabilidad estar ntimamente ligada a la configuracin que tenga la aeronave. Estas
configuraciones pueden ser: alas delta, configuraciones canard, configuraciones standard alas
bajas, alas altas, estabilizadores en T, convencionales, etc. (Figura 9)
Figura 9
11
Estabilidad Esttica Longitudinal a comandos bloqueados
Consideraciones para el Anteproyecto
La estabilidad esttica del avin establece si los momentos y fuerzas que genera la
configuracin del mismo, son los adecuados para producir la recuperacin ante una
perturbacin cualquiera que lo desplace de su posicin de equilibrio, respecto del baricentro
del mismo.
Solo importan la direccin y sentido de dichas fuerzas y momentos, pero no su magnitud,
puesto que esto implicara un anlisis dinmico del problema. No nos interesa en este anlisis
como se comporta ante una perturbacin cualquiera, sino si estos momentos son los
adecuados para diferenciar lo que es la estabilidad esttica de la dinmica.
Haremos hincapi en la estabilidad esttica longitudinal, puesto que en una primera etapa de
anlisis, es la ms importante en el diseo, y su estudio implica el establecimiento de los
parmetros y elementos ms importantes de la aeronave.
En lo que sigue consideraremos las distintas configuraciones posibles a analizar.
Lo que se busca, principalmente, es encontrar y disear los elementos necesarios para poder
realizar la compensacin adecuada de los momentos que genera el ala respecto de C.G. del
avin para lograr mantener la condicin de equilibrio en las distintas situaciones de vuelo.
Aparecen, por lo tanto, diferentes configuraciones posibles para salvar estos efectos a saber:
Ala estabilizador posterior (configuracin convencional)
Ala en delta
Ala estabilizador anterior (configuracin Canard)
Estas son las principales; existirn adems de estas, variantes sobre las mismas (3 planos, 4
planos, etc.)
Tipos de Perfil.
Si analizamos en una primera etapa la configuracin de un ala sola, deberemos considerar que
tipo de perfil emplearemos en ella para obtener la sustentacin necesaria para soportar el peso
que consideramos en cada caso.
Respecto de los perfiles a emplear, sabemos que podremos clasificarlos segn la curvatura de
la lnea media:
1)_ Con curvatura
2)_ Sin curvatura
3)_ Con doble curvatura
Consideraciones acerca de la estabilidad esttica para perfiles
El avin o aeronave en cuestin puede volar si en su trayectoria puede proveer un elemento
sustentador que por lo menos equilibre el peso del mismo. Contando como elemento
sustentador al ala, esta estar provista de un perfil. Los perfiles por sus configuraciones, en
sus lneas medias, pueden dividirse en tres. Las de una curvatura, sin curvatura y de dos
curvaturas en sus lneas medias. Este tipo de configuracin cambia en forma notoria sus
caractersticas. Analizando cada uno de ellos se observa:
12
Para el perfil de una curvatura en su lnea media:
1)_ Valores de Cl aceptables
2)_ Valores de Cd bajos
3)_ Valores de Cm
C/4
que debern compensarse
Debe proveerse un momento adicional ya que el perfil buscar por si slo llegar al valor de
su
0
.
Para el perfil sin curvatura (simtrico) en su lnea media:
1)_ Valores de Cl aceptables
2)_ Valores de Cd altos
3)_ Cm
C/4
= 0 para 0 de incidencia. Debe proveerse algn momento adicional para que exista
sustentacin. El perfil buscara siempre el
0
= 0
13
Para el perfil con doble curvatura en su lnea media:
1)_ Valores aceptables de Cl
2)_ Valores de Cd algo mayores a los del perfil asimtrico
3)_ Cm
C/4
nulos en la zona de vuelo
No necesita adicionar otro elemento que anula el momento en el Cm
C/4
Por lo expuesto puede expresarse que:
El perfil asimtrico es inestable
El perfil simtrico es indiferente
El perfil con doble curvatura es estable autoestable
14
Estabilidad esttica Longitudinal para el Ala Sola.
Un primer anlisis que se puede realizar es el de estudiar el comportamiento del ala sin
ningn otro elemento.
Para ello debemos realizar las siguientes consideraciones iniciales:
Todo ello leva a que:
0 . I M
..
. G . C . G . C
= =
por consiguiente CM
C.G.
= 0 es la condicin de equilibrio.
Se asume por convencin que la variacin del momento respecto del ngulo de ataque sea
negativo |
.
|
\
|
0
Cm
. G . C
, como condicin de estabilidad. Esto surge del siguiente anlisis:
( )
* * * *
. A . C
*
. G . C . A . C . G . C
Z . T Z . D X X . L M M + + + =
Como D << L D 0. Adems T 1/10 L
( )
*
. A . C
*
. G . C . A . C . G . C
X X . L M M + =
Considerando los coeficientes de sustentacin y momentos nos queda:
( )
*
. A . C
*
. G . C
2
. A . C
2
. G . C
2
X X . CL . S V .
2
1
Cm . C . S . V .
2
1
Cm . C . S . V .
2
1
+ =
L = W (Sustentacin = Peso)
D = T (Resistencia = Traccin / Empuje)
L = Cte. Cl = Cte. = Cte.
=
=
0
0
D
D
& &
&
15
Dividiendo por C . S . V .
2
1
2
nos queda:
( )
. . . . . . . .
.
A C G C A C G C
X X CL Cm Cm + = donde
=
=
C
X
X
C
X
X
*
. A . C
. A . C
*
. G . C
. G . C
Considerando que CL .
CL
=
( )
. A . C . G . C . A . C . G . C
X X . .
CL
Cm Cm
+ =
Si derivamos respecto de , nos queda:
( )
. A . C . G . C
. A . C . G . C
X X
CL Cm Cm
0
Cm
. A . C
=
(el momento respecto del C.A. es independiente del ngulo de ataque)
( )
. A . C . G . C
. G . C
X X
CL Cm
Como sabemos que la condicin de equilibrio esttico implica que la
. G . C
Cm
sea negativa,
entonces resulta que como
CL
es positiva, deber ser X
C.G.
- X
C.A.
< 0
Si X
C.G.
- X
C.A.
< 0 X
C.G.
< X
C.A.
Esta ser la condicin de equilibrio esttico para el ala sola.
Es decir que para el equilibrio en esta condicin se deber dar la situacin en la cual el C.G.
se encuentra delante del C.A.
16
Estabilidad esttica longitudinal para el sistema ala-estabilizador
Obs. Z
o
= Z
2
( ) d . L Z . D Z . T X X . L M M
C 0 1 AP
*
. A . C
*
. G . C . A . C . G . C
AP
+ =
( ) + + =
1
2 *
. A . C
*
. G . C
2
. A . C
2
. G . C
Z . T S . V . . X X . CL
2
1
C . S . V . CM
2
1
C . S . V . CM
2
1
d . S . V . . Cl
2
1
Z . S . V . . CD
2
1
C
2
c 0
2
( )
{
C
C
V
. C
A
2
C
2
c
0
2
1
*
. A . C
*
. G . C
. A . C . G . C
C . S
d S
.
V .
2
1
V .
2
1
Cl
C
Z
CD
C . S . V .
2
1
Z . T
C
X X
. CL CM CM
43 42 1
|
.
|
\
|
|
.
|
\
|
+ =
( )
C C c
0
2
1
. A . C . G . C . A . C . G . C
V . . Cl
C
Z
CD
C . S . V .
2
1
Z . T
X X . CL CM CM
+ =
S Z
1
0 y Z
0
0 D
D
.
AP
L
L
C
C
=
c
c
L
L
c
c
C
C D
D
.
=
c c
i = H D D
( ) ( )
C C C
C
C
. A . C . G . C
AP
. A . C . G . C
V . i . .
CL
X X . .
CL
CM CM |
.
|
\
|
|
.
|
\
|
+ =
17
Donde:
+ =
+ =
0 0
CL
CL
( )
C C 0 C
C
C
. A . C . G . C
AP
. A . C . G . C
V . i . . .
CL
X X . .
CL
CM CM
|
.
|
\
|
|
.
|
\
|
|
.
|
\
|
+ =
Derivando respecto de :
( )
C C
C
C
. A . C . G . C
AP
. G . C
V . 1 . .
CL
X X .
CL CM
|
.
|
\
|
|
.
|
\
|
|
.
|
\
|
02 , 0
CM
01 , 0
. G . C
(rango de valores considerado estable, con condiciones de
estabilidad dinmica aceptable)
2,5 C d 3,5 C (3 a 3,5)
0,2 < X
CG
< 0,4 (rango de valores convencionales para la posicin del CG)
V
C
de 0,5 a 1,1 entre (0,45 y 0,55)
C
= 3 a 4
C
= 0,9 a 1,1
Punto neutro : (equilibrio indiferente)
0
CM
. G . C
=
valores aceptables del punto neutro N
0
> 0,4
C C
AP
C
. A . C 0 Lm . G . C
V . . 1 .
CL
CL
X N X
|
.
|
\
|
|
.
|
\
|
|
.
|
\
|
+ = =
S . V .
2
1
L
S . V .
2
1
L
S . V .
2
1
L
L L L
2
C
2
AP
2
C AP
+ =
18
S
S
i
CL CL
CL CL CL
C
C C
C AP
C AP
C
. . . . .
0
4 4 4 3 4 4 4 2 1
D
D
D
H
H D K
D
D
D
|
.
|
\
|
|
.
|
\
|
+
|
.
|
\
|
= + =
Sistema:
(1)
( )
C C 0 C
C
. A . C . G . C
AP
AP
. A . C . G . C
V . i . . .
CL
X X . .
CL
CM CM
|
.
|
\
|
|
.
|
\
|
|
.
|
\
|
+ =
(2)
S
S
. i . . .
CL
.
CL
CL
C
C 0 C
C AP
|
.
|
\
|
|
.
|
\
|
+
|
.
|
\
|
=
Clculo de los parmetros:
(1)
( )
C C
C
0
AP
. A . C C C
C
C C C
C
. A . C . G . C
AP
V . .
CL
CM V . .
CL
i . V . 1 . .
CL
X X
CL
|
.
|
\
|
=
(
|
.
|
\
|
+
(
|
.
|
\
|
|
.
|
\
|
|
.
|
\
|
(2)
S
S
. .
CL
C .
S
S
.
CL
. i . 1 .
S
S
.
CL CL
C
C
C
0 L C
C
C
C C
C
C AP
|
.
|
\
|
+ =
|
.
|
\
|
|
.
|
\
|
|
.
|
\
|
+
|
.
|
\
|
a)
AP
CL CL
|
.
|
\
|
|
.
|
\
|
b)
. A . C
X
b1)- Comenzar utilizando el X
C.A.
del perfil.
b2)- Si el fuselaje se prolonga en forma considerable sobre el ala se puede tomar un
corrimiento del X
C.A.
de un 4 a 6 % de C. Para gndolas motrices se considera de igual forma.
b3)-
La variacin del momento estar dada por:
19
+ = .
CM
CM CM
. A . C
. A . C . A . C
ALA AP
Como
=
Cl
Cl
.
Cl
Cl
+ =
Cl
Cl
.
CM
CM CM
. A . C
. A . C . A . C
ALA AP
=
Cl
Cl
.
CM
CM
. A . C
. A . C y
. A . C . A . C
X . Cl CM =
Cl
CM
Cl
CM
Cl
CM
X
. A . C
. A . C
. A . C
. A . C
=
b4)- Otra forma:
Estimacin del X
C.A.
:
. A . C 2 . A . C 1
ala
. A . C
AP
. A . C
X . X . X X + + =
C S
l hf bf
Cl
X
fn
ap
A C
.
. .
8 , 1
.
adelante fuselaje del mximos alto y ancho
. . 1
8 7 6
D
=
( )
4 / 1
2
. . 2
tg .
) . 15 , 2 .(
) .( .
1
273 , 0
.
+
+
=
bf b C
bf b C bf
A
X
A C
(Para
b
bf
< 0,2)
C)
C
Cl
|
.
|
\
|
(Por considerar nula la sustentacin del fuselaje o
gndolas motrices)
(l
fn
: Distancia desde nariz a B.A. de raz, o
punto de contacto con el fuselaje)
20
C1)_
. . 2
. . . 2
O E K
K O S
D
+
= Cl
C2)_ De valores empricos (NACA 0009)
C3)_ Report NACA 721
C4)_ Multhopp
D) -
0
: Corresponde a la presencia del ala en el fluido con incidencia nula (sin sustentacin),
de la interferencia ala-fuselaje, etc.
-2
0
2
E) -
Downwash
E1)- Mtodo expuesto en el Perkins- Hage
b = envergadura
b
t
= envergadura del plano horizontal
De los grficos:
Como el valor de
varia a lo largo de la envergadura del plano horizontal se utiliza la
siguiente grfica:
= alargamiento
= rendimiento del perfil
0,9<<1
(Placa plana 0,96)
2
M 1 =
(Clculo de la variacin del flujo sobre el plano horizontal de cola al
variar la incidencia)
2
b
m
m
2
b
r
r
*
*
=
=
RR : (ahusamiento)
21
V
C
: Volumen de cola
C . D
d . S
C
V
C
0,5
d : C 5 , 3 d C 5 , 2
0,4 V
C
1
C
: Rendimiento de cola 0,9
C
1,1
22
( ) 0 V . . 1 .
Cl
X X
Cl
C C
C
. cap . G . C
AP
=
|
.
|
\
|
|
.
|
\
|
|
.
|
\
|
( )
C C
AP
C
. cap . G . C
V . . 1 .
Cl
Cl
X X
|
.
|
\
|
|
.
|
\
|
|
.
|
\
|
=
C C
AP
C
. cap . G . C
V . . 1 .
Cl
Cl
X X
lim
|
.
|
\
|
|
.
|
\
|
|
.
|
\
|
+ =
Para interferencia ala-fuselaje, ver apndice E Pg.. 477.- TOREMBEEK
De la siguiente ecuacin tenemos dos contribuciones:
( )
C C
C
C
. A . C . G . C
ap oqueados ComandosBl . eto AvionCompl
. G . C
V . ). 1 .(
Cl
X X .
Cl CM
Donde por el signo negativo es estabilizante. No depende de la incidencia, no depende del
ngulo de incidencia del plano horizontal. Es ms negativo cuanto mayor es el valor de
C
C
Cl
(
. O sea, cuanto ms grande es el desplazamiento del plano horizontal (los valores de
de cola 3-4).
De este modo cuando la estabilidad del avin se establece para una determinada condicin,
principalmente lo fija la posicin de baricentro, la estabilidad se asegura para otros valores de
y de i
C
en otras condiciones de vuelo, dentro de limites lgicos. Esto ocurre porque en los
perfiles, los cambios de lnea media no son tan perjudiciales en lo que se refiere al CM
C.A.
y
no producen efectos notables sobre la relacin volumtrica de la cola.
En el punto A Cm = 0
La 0
Cm
=
ser el punto
neutroo de equilibrio
indiferente.
23
( )
C C C 0
C
C
. A . C . G . C
ap
. A . C . G . C
V . ). i . .(
Cl
X X . .
Cl
CM CM
(
+ =
Los valores aceptables de i
C
son 3. Por lo tanto una vez asegurado el centrado para el Cl
considerado, se necesita una segunda relacin de i
C
y .
La sustentacin de la aeronave estar dada por:
S
S
. i . . .
Cl
.
Cl
CL CL CL
C
C 0 C
C AP
C AP
|
.
|
\
|
|
.
|
\
|
+
|
.
|
\
|
= + =
(2)
|
.
|
\
|
=
|
.
|
\
|
=
C 0
C
C
C C
C
2
C
i . .
Cl
Cl
CL . S . V .
2
1
L
Cuando se divide por S y por
2
V .
2
1
aparece S
C
/S y
C
. Tomando las ecuaciones tenemos
dos incgnitas (i
C
y )
( )
+ =
+
(
=
C C C
C
C
A C G C
ap
A C G C
C C
C
C
C
ap
V i
Cl
X X
Cl
CM CM
i
S
S Cl Cl
CL
. ). . .( . .
). . .(
0
. . . .
. . . .
0
K D
D
H
H D
D
D
D
K D
D
H
H D
D
D
D
( )
0 . .
. . . .
0
. . . . . . . ). 1 .( . .
. . . . . . ). 1 .( . .
H K
D
K
D
K
D
H
D D
D
H K
D
K
D
K
D
H
D D
D
C C
C
A C C C
C
C
C C C
C
C
A C G C
ap
C
C
C
C
C
C
C
C C
C
C
C
ap
V
Cl
CM V
Cl
i V
Cl
X X
Cl
S
S Cl
Cl
S
S Cl
i
S
S Cl Cl
|
.
|
\
|
= |
.
|
\
|
+
(
(
|
.
|
\
|
|
.
|
\
|
|
.
|
\
|
+ = |
.
|
\
|
(
(
|
.
|
\
|
+
|
.
|
\
|
Resolviendo el sistema de 2 2 se obtendrn i
C
y :
| | | |
| | | |
=
= +
* *
C
*
C
C B i A
C B i A
) 5 (
24
* *
* *
B A
B A
B C
B C
=
* *
* *
C
B A
B A
C A
C A
i =
+ = .
CM
CM CM
. A . C
) AlaSola .( A . C ) Parcial . Av .( A . C (Por considerar nula la sustentacin
del fuselaje o gndola motriz)
+ =
Cl
Cl
.
CM
CM CM
. A . C
) AlaSola .( A . C ) Parcial . Av .( A . C
Cl
Cl
(un solo valor de ). El ultimo valor se mantiene solo para un valor de Cl y por
consiguiente de .
. A . C . A . C
. A . C
. A . C
X . Cl CM ;
Cl
Cl
.
CM
CM =
=
Cl
CM
Cl
CM
Cl
CM
X
. A . C
. A . C
. A . C
. A . C
=
Al ser
. A . C
CM
positiva, se verifica una variacin que hace cabrear al avin.
C
Cl
|
.
|
\
|
-Con la teora linealizada de Glauert, no se obtienen resultados satisfactorios para las
pendientes, por lo que en alargamientos menores de 6, hay que buscar otros
mtodos.
a) Grfico . Vlido para el perfil NACA0009, en funcin del alargamiento.
Mejor condicin de crucero. Cl de
diseo. Sobre esta base se pueden
trazar los diagramas para distintos
ngulos de incidencia i
C
y vale
para un valor asignado de X
C.G.
25
b) Mediante el Mtodo de Multhopp.
Grfico CM
C.G.
-
Obtenidos los valores - i
C
para un dado valor de Cl se pueden trazar estos diagramas para
distinto i
C
y para un valor dado de X
C.G.
:
( ) B A C V i
C
C
C
X X
C
C
CG CA CG
M C C C
C
L
M
C
L
CA CG
ap
L
M
+ =
|
.
|
\
|
+ +
(
(
|
.
|
\
|
|
.
|
\
|
|
.
|
\
|
= D K
D
D
D
H
D D
1
Determinacin del CM
CA (AP)
(Shekel, Stability and Control of Airplanes and Helicopters Academic Press 1968)
Posicin del BA de la CMA respecto al BA en la raz:
26
El incremento del momento longitudinal causado por el fuselaje o gndolas motrices se puede
expresar:
CMA . S . 5 , 36
dx . ). x ( Wf
CM
;
CMA . S . q
M
CM
L
0
2
1
=
=
Este grfico es para un valor de
do gra
1
08 , 0
Cl
ala
=
.
Para otros valores la
varia proporcionalmente y es funcin lineal de X/Cma
2
S
dY ). Y ( C ). Y ( X
X
2
b
0
a . b
a . b
CMA
=
dx . ). x ( Wf
5 , 36
q
d
dM
. M
L
0
2
1
1
=
27
) W . 3 W . 2 W (
290
) CMA ( q
d
dM
b 2 / CMA ba
2
2
+ =
S . 290
) W . 3 W . 2 W .( CMA CM
b 2 / CMA ba
2
+
=
D
D D
.
fuselaje del ancho el Por
2
fuselaje del largo el Por
1
(
(
(
(
|
.
|
\
|
+
|
.
|
\
|
+ =
43 42 1 43 42 1
CM CM
CM CM
ala AP
Estabilidad longitudinal ala-estabilizador con traccin
La incorporacin de la traccin se puede considerar en la ecuacin del momento:
( ) d . L Z . T X X . L M M
C
* * *
. A . C
*
. G . C . A . C . G . C
) Ala Fuselaje (
al AvinParci
) Ala Fuselaje (
al AvinParci
+ =
+ +
28
Aqu hay que estimar una distancia Z
**
al C.G.:
Donde Z1 = Z**
CL . S . V .
2
1
L
2
|
.
|
\
|
=
( )
C . S . V .
2
1
d . L
C . S . V .
2
1
Z . T
X X
C . S . V .
2
1
L
C . S . V .
2
1
M
C . S . V .
2
1
M
2
C
2
* *
*
. A . C
*
. G . C
2 2
. A . C
2
. G . C
( )
C S V
d S V Cl
C S V
Z T
X X CL CM CM
C C C
A C G C
A C G C
. . .
2
1
. . ) .
2
1
.(
. . .
2
1
.
.
2
2
2
* *
. . . .
. . . .
U
U
U
+ =
( ) ( )
C C C
C
A C G C
A C G C
i V
Cl
C S V
Z T
X X
Cl
CM CM
|
.
|
\
|
+ = H D P
D
U
D
D
. .
. . .
2
1
.
.
2
* *
. . . .
. . . .
Para vuelo recto y nivelado T = D = 1/2..V
2
.S. C
D
( ) ( )
C C C
C
D
A C G C
A C G C
i V
Cl
C S V
Z C S V
X X
Cl
CM CM
|
.
|
\
|
+ = H D P
D
U
U
D
D
. .
. . .
2
1
. . . .
2
1
. .
2
* * 2
. . . .
. . . .
29
En el sistema de dos ecuaciones con 2 incgnitas, se incorpora:
( )
3 2 1
diseo de e Coeficient
* *
0 . .
. . . .
. . .
. . . . ). 1 .( . .
C
Z
C V
Cl
CM
V
Cl
i V
Cl
X X
Cl
D C C
C
A C
C C
C
C
C C C
C
C
A C G C
ap
|
.
|
\
|
=
= |
.
|
\
|
+
(
(
|
.
|
\
|
|
.
|
\
|
H K
D
K
D
K
D
H
D D
D
43 42 1
vorticoso flujo al debido Termino
0
.
Max
Max
CL
CL
CL
CL
Max
D D D
D
+ + =
Ref. 3
Bibliografa
1- Airplane Performance Stability and Control - C.D. Perkins, R.E. Hage. - 1949.
2- Aerodynamics, Aeronautics, and Flight Mechanics - B.W. McCormick
John Wiley & Sons,Inc. - 1979.
3- Aircraft Design: A Conceptual Approach - D.P. Raymer - AIAA (American Institute of
Aeronautics and Astronautics) Education Series - 1999.
También podría gustarte
- Consideraciones Sobre La Ergonomía de CabinaDocumento4 páginasConsideraciones Sobre La Ergonomía de CabinamartinsandovalandresAún no hay calificaciones
- TP4 - Compensación en El Plano Complejo - en FrecuenciaDocumento10 páginasTP4 - Compensación en El Plano Complejo - en FrecuenciamartinsandovalandresAún no hay calificaciones
- Estabilidad Longitudinal AerodinámicaDocumento10 páginasEstabilidad Longitudinal AerodinámicamartinsandovalandresAún no hay calificaciones
- Análisis de La Estabilidad Estática Longitudinal Informe 7Documento8 páginasAnálisis de La Estabilidad Estática Longitudinal Informe 7martinsandovalandresAún no hay calificaciones
- Estabilidad DinámicaDocumento10 páginasEstabilidad DinámicamartinsandovalandresAún no hay calificaciones
- TP1 - Análisis de Procesos DinámicosDocumento12 páginasTP1 - Análisis de Procesos DinámicosmartinsandovalandresAún no hay calificaciones
- TP4 - Compensación ClásicaDocumento8 páginasTP4 - Compensación ClásicamartinsandovalandresAún no hay calificaciones
- MITEMDocumento17 páginasMITEMRosbert Jhony Malpaso NiñoAún no hay calificaciones
- TP3 - Analisis de Sistemas RealimentadosDocumento6 páginasTP3 - Analisis de Sistemas RealimentadosmartinsandovalandresAún no hay calificaciones
- TP2 Respuesta en Frecuencia C&GDocumento15 páginasTP2 Respuesta en Frecuencia C&GmartinsandovalandresAún no hay calificaciones
- TP3 - Analisis de Sistemas RealimentadosDocumento6 páginasTP3 - Analisis de Sistemas RealimentadosmartinsandovalandresAún no hay calificaciones
- VIBRACIONESDocumento47 páginasVIBRACIONESDaniel Rodriguez AzodnemAún no hay calificaciones
- TP3 - Analisis de Sistemas RealimentadosDocumento6 páginasTP3 - Analisis de Sistemas RealimentadosmartinsandovalandresAún no hay calificaciones
- 3 Radiografía IndustrialDocumento20 páginas3 Radiografía IndustrialmartinsandovalandresAún no hay calificaciones
- La LuzDocumento8 páginasLa LuzHemerson001Aún no hay calificaciones
- Aero II Resúmen Módulo IDocumento16 páginasAero II Resúmen Módulo ImartinsandovalandresAún no hay calificaciones
- Resumen Conceptos-Regresión Lineal SimpleDocumento7 páginasResumen Conceptos-Regresión Lineal SimplemartinsandovalandresAún no hay calificaciones
- Mediciones-Resumen 2do Módulo (Sistema Pitot Estática, Atmósfera Estándar)Documento10 páginasMediciones-Resumen 2do Módulo (Sistema Pitot Estática, Atmósfera Estándar)martinsandovalandresAún no hay calificaciones
- Resumen-Intervalos de Confianza (2da Parte)Documento4 páginasResumen-Intervalos de Confianza (2da Parte)martinsandovalandresAún no hay calificaciones
- 1-Estadistica DescriptivaDocumento20 páginas1-Estadistica DescriptivaHector CamayaAún no hay calificaciones
- Test de HipotesisDocumento41 páginasTest de HipotesisChaves AristotelesAún no hay calificaciones
- Sistemas y Equipos - Resumen Módulo IIDocumento18 páginasSistemas y Equipos - Resumen Módulo IImartinsandovalandresAún no hay calificaciones
- Ejercicio 6Documento1 páginaEjercicio 6martinsandovalandresAún no hay calificaciones
- Sistema de Alarma - Guía Teórica V04Documento13 páginasSistema de Alarma - Guía Teórica V04martinsandovalandresAún no hay calificaciones
- Enunciado TP IntegradorDocumento3 páginasEnunciado TP IntegradormartinsandovalandresAún no hay calificaciones
- SLO PlantaDocumento1 páginaSLO PlantamartinsandovalandresAún no hay calificaciones
- ENUNCIADODocumento2 páginasENUNCIADOmartinsandovalandresAún no hay calificaciones
- TP1 (Ej 1a3)Documento5 páginasTP1 (Ej 1a3)martinsandovalandresAún no hay calificaciones
- Ejercicio 4BDocumento1 páginaEjercicio 4BmartinsandovalandresAún no hay calificaciones
- Cuestionario TP3Documento2 páginasCuestionario TP3martinsandovalandresAún no hay calificaciones