También podría gustarte
- Asignacion de PolosDocumento44 páginasAsignacion de PolosAlexizAyala0% (1)
- Detector de - SECUENCIA1010Documento3 páginasDetector de - SECUENCIA1010Alejandro Cortes0% (1)
- Ogatasol 2Documento51 páginasOgatasol 2Emiliano SegovianoAún no hay calificaciones
- Modelado y Análisis de Sistema de Control de ElevadorDocumento11 páginasModelado y Análisis de Sistema de Control de ElevadorFernando GuiraudAún no hay calificaciones
- Entrada Tipo ParabolaDocumento28 páginasEntrada Tipo ParabolaJuan Camilo NaranjoAún no hay calificaciones
- Sistemas ProgramablesDocumento4 páginasSistemas ProgramablesivantwrsAún no hay calificaciones
- Control PID de LuminosidadDocumento19 páginasControl PID de LuminosidadRafael Toala100% (1)
- 3.2.-Diseño de Controladores Por Ubicación de PolosDocumento55 páginas3.2.-Diseño de Controladores Por Ubicación de PolosAlex0% (1)
- Reporte Control de Posición Motor DCDocumento5 páginasReporte Control de Posición Motor DCVictor Amaurys PerezAún no hay calificaciones
- Control Net ProtocoloDocumento2 páginasControl Net ProtocoloMario VeintimillaAún no hay calificaciones
- Labview BastianDocumento84 páginasLabview BastianLuis Lema100% (1)
- Orden CeroDocumento6 páginasOrden CeroSamuel AruquipaAún no hay calificaciones
- Controlador Pid AscensorDocumento20 páginasControlador Pid AscensorAlbert Willy100% (2)
- Ejercicios 7 y 8 Sistemas de Control IIDocumento4 páginasEjercicios 7 y 8 Sistemas de Control IIJosue Israel MendozaAún no hay calificaciones
- Control Digital Motor DCDocumento23 páginasControl Digital Motor DCantonyglzAún no hay calificaciones
- Control II - La Función de Transferencia PulsoDocumento24 páginasControl II - La Función de Transferencia PulsoAlberto Pacheco Herrera50% (2)
- Señales y SistemasDocumento44 páginasSeñales y Sistemasfloresnataniel100% (1)
- Practica 5 Control de Potencia Con Triac - Lab. Electronic A de PotenciaDocumento1 páginaPractica 5 Control de Potencia Con Triac - Lab. Electronic A de PotenciaCarlos Ortiz50% (2)
- Analisis de Sistemas en El Espacio de Estados.Documento7 páginasAnalisis de Sistemas en El Espacio de Estados.Paul Guillen100% (2)
- Tabla Comparativa: Flip Flop VS LatchDocumento2 páginasTabla Comparativa: Flip Flop VS LatchNoé Beltrán100% (2)
- Ascensor Controlado Con PID AnalogicoDocumento6 páginasAscensor Controlado Con PID AnalogicoRenzzo Gomez ReatigaAún no hay calificaciones
- Transformada Z ModificadaDocumento7 páginasTransformada Z ModificadaЭРеки50% (2)
- Taller 2Documento2 páginasTaller 2api-3711530Aún no hay calificaciones
- Teoria de Control Electronico 5Documento103 páginasTeoria de Control Electronico 5Juan Pablo García Flores71% (7)
- Ejercicios 4Documento42 páginasEjercicios 4micro62003Aún no hay calificaciones
- Convertidor SepicDocumento5 páginasConvertidor SepicjhelobeAún no hay calificaciones
- Rectificador ControladoDocumento9 páginasRectificador Controladonelguarher100% (2)
- Lugar Geometrico de Las RaicesDocumento33 páginasLugar Geometrico de Las RaicesAquiles Moya67% (3)
- Introducción Al Convertidor BuckDocumento8 páginasIntroducción Al Convertidor BuckFreddy E Muñoz B100% (1)
- Semiconvertidor MonofasicoDocumento23 páginasSemiconvertidor MonofasicoPablo Enrique50% (2)
- Laboratorio #1 Oscilador ColpittsDocumento6 páginasLaboratorio #1 Oscilador ColpittsBrandon Cruz0% (1)
- Tiristores y Dispositivos de ConmutacionDocumento19 páginasTiristores y Dispositivos de Conmutacionricardo gomezAún no hay calificaciones
- Subtemas 1.1 y 1.2 Respuesta en Frecuencia y Fasores para La RFDocumento5 páginasSubtemas 1.1 y 1.2 Respuesta en Frecuencia y Fasores para La RFluis ferAún no hay calificaciones
- Labvolt GuiaDocumento6 páginasLabvolt GuiaWilsonAún no hay calificaciones
- 1.3 Control Clasico Vs Control ModernoDocumento11 páginas1.3 Control Clasico Vs Control ModernoAdolfo RaygozaAún no hay calificaciones
- Diseño de Un Controlador PID para Una Planta de Luz Mediante MatlabDocumento7 páginasDiseño de Un Controlador PID para Una Planta de Luz Mediante Matlabjorge_22191160% (1)
- Comando IDENT MatlabDocumento7 páginasComando IDENT Matlabangel guerreroAún no hay calificaciones
- Informe de Laboratorio FSKDocumento12 páginasInforme de Laboratorio FSKLuis Eduardo100% (2)
- Analisis Conveertidor CukDocumento32 páginasAnalisis Conveertidor CukCamilo JiménezAún no hay calificaciones
- Tarea 1 Análisis de Sistemas DinámicosDocumento1 páginaTarea 1 Análisis de Sistemas DinámicosAirRey23Aún no hay calificaciones
- Estabilidad y Análisis en Frecuencia Nichols y NyquistDocumento9 páginasEstabilidad y Análisis en Frecuencia Nichols y NyquistKarimAún no hay calificaciones
- Modelo Matematico de Un Motor DCDocumento10 páginasModelo Matematico de Un Motor DCNiltonGonzalesAún no hay calificaciones
- Proteus PICDocumento22 páginasProteus PICGustavo P RAún no hay calificaciones
- Dinamica de Un Motor DC en Tiempo DiscretoDocumento3 páginasDinamica de Un Motor DC en Tiempo DiscretoIsaias FloCaAún no hay calificaciones
- Codificador 16 A 4Documento42 páginasCodificador 16 A 4Camilo A. Infante50% (2)
- Unidad IIDocumento3 páginasUnidad IIRaul Gutiérrez Soto50% (2)
- Retenedor de Orden 0Documento12 páginasRetenedor de Orden 0Rodolfo Fernández GallardoAún no hay calificaciones
- Acensor de Tipo Lazo CerradoDocumento3 páginasAcensor de Tipo Lazo CerradoLujum Irt Mojam UrbAún no hay calificaciones
- Criterio de Estabilidad de JuryDocumento4 páginasCriterio de Estabilidad de JuryDiana Rodriguez ZavaletaAún no hay calificaciones
- Como Hacer Reloj DigitalDocumento9 páginasComo Hacer Reloj DigitalSusy VillafanAún no hay calificaciones
- Solucion - EXAMEN FINAL DE CONTROL DIGITALDocumento5 páginasSolucion - EXAMEN FINAL DE CONTROL DIGITALJuan Manuel VargasAún no hay calificaciones
- Levitacion Magnetica PIDDocumento8 páginasLevitacion Magnetica PIDJPSTEELAún no hay calificaciones
- Control de Velocidad de Un Motor DCDocumento14 páginasControl de Velocidad de Un Motor DCDionel Castro100% (2)
- Control Ángulo de Ataque AerogeneradoresDocumento7 páginasControl Ángulo de Ataque Aerogeneradorespizzicato_strAún no hay calificaciones
- Analisis de Control Analogico y Digital de Una PlantaDocumento11 páginasAnalisis de Control Analogico y Digital de Una PlantaPedro JavierAún no hay calificaciones
- Ziegler - NicholsDocumento10 páginasZiegler - NicholsgorAún no hay calificaciones
- Laboratorio 2 Control (Diana Ovalle)Documento9 páginasLaboratorio 2 Control (Diana Ovalle)johnyAún no hay calificaciones
- Ajuste de Un Controlador Pid PDFDocumento7 páginasAjuste de Un Controlador Pid PDFHugo Hernando Diaz RagaAún no hay calificaciones
- Caracterizacion Dinamica de Un Motor DCDocumento8 páginasCaracterizacion Dinamica de Un Motor DCJonnatan RomeroAún no hay calificaciones
- Control TemperaturaDocumento6 páginasControl Temperaturajrockb1234Aún no hay calificaciones
- Regulador de Velocidad de Motor Trifásico Controlado Por PWMDocumento3 páginasRegulador de Velocidad de Motor Trifásico Controlado Por PWMluis DiazAún no hay calificaciones
- Alternadores Controlados Por La PCM 1.PDF Versión 1Documento38 páginasAlternadores Controlados Por La PCM 1.PDF Versión 1ismael_alig1881Aún no hay calificaciones
- Temario de Microcontroladores Con LabVIEWDocumento4 páginasTemario de Microcontroladores Con LabVIEWCarlos OrtegaAún no hay calificaciones
- Programacion de Perifericos ArduinoDocumento56 páginasProgramacion de Perifericos ArduinoYazmin Vázquez Olan100% (1)
- Presentacion GaDocumento56 páginasPresentacion GaSOPORTE TECNICOAún no hay calificaciones
- Enfriador HidráulicoDocumento46 páginasEnfriador HidráulicoJose Vidal100% (1)
- Electrónica Básica para Motores CATDocumento33 páginasElectrónica Básica para Motores CATpevare100% (4)
- Práctica 1 - Lenguajes de ProgramaciónDocumento7 páginasPráctica 1 - Lenguajes de ProgramaciónNicolas CruzAún no hay calificaciones
- Labview ProyecDocumento11 páginasLabview ProyecVale RmcAún no hay calificaciones
- Señal Del Sensor PWM-probarDocumento18 páginasSeñal Del Sensor PWM-probarEdwin juanito gamarra serranoAún no hay calificaciones
- INF Práctica 6: CONTROL PWM ANALÓGICO CON OPTOAISLAMIENTO Y DETECTOR DE CRUCE POR CERODocumento3 páginasINF Práctica 6: CONTROL PWM ANALÓGICO CON OPTOAISLAMIENTO Y DETECTOR DE CRUCE POR CEROYilmar Pedrozo Arguello0% (1)
- Lab 3 3 Alulema Rea YanezDocumento22 páginasLab 3 3 Alulema Rea Yanezdiego alulemaAún no hay calificaciones
- Practicas - Electronica de PotenciaDocumento22 páginasPracticas - Electronica de PotenciaSergioma GarochaAún no hay calificaciones
- Guia de Aprendizaje F4 AP4 GA06 TAI ListaDocumento17 páginasGuia de Aprendizaje F4 AP4 GA06 TAI ListaYampol SilvaAún no hay calificaciones
- Temporizadores, CCP, Timers, Pwm-ProtonDocumento24 páginasTemporizadores, CCP, Timers, Pwm-ProtonAnonymous EqjLp8LkjaAún no hay calificaciones
- Lab11 PWMDocumento12 páginasLab11 PWMOnil Alex VeranoAún no hay calificaciones
- Salazar Esteban - Proyecto - ADC y PWMDocumento11 páginasSalazar Esteban - Proyecto - ADC y PWMerik toapantaAún no hay calificaciones
- Capacitacion Norma IEC60034 25 Pate - 1Documento60 páginasCapacitacion Norma IEC60034 25 Pate - 1Aleymar Arturo Travi JojoaAún no hay calificaciones
- Neuro Controlador Motor DCDocumento10 páginasNeuro Controlador Motor DCjhuamang100% (2)
- Diplomado en Electronica y Electricidad IndustrialDocumento2 páginasDiplomado en Electronica y Electricidad Industrialcarlos18102Aún no hay calificaciones
- Control de Motores Eléctricos - Fundamentos de Controles EléctricosDocumento146 páginasControl de Motores Eléctricos - Fundamentos de Controles EléctricosMMAún no hay calificaciones
- Hyundai AvrDocumento30 páginasHyundai AvrivanAún no hay calificaciones
- 8 Canales de PWM Con Un 16F628ADocumento8 páginas8 Canales de PWM Con Un 16F628AEsteticoAún no hay calificaciones
- Grupo 7 Diapositivas Proyecto InversorDocumento14 páginasGrupo 7 Diapositivas Proyecto InversorAlexander DelgadoAún no hay calificaciones
- Motores Heui 3408e-3412eDocumento144 páginasMotores Heui 3408e-3412errodriguez40589% (9)
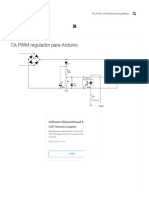
- CA PWM Regulador para Arduino: (/) Por Favor, Introduzca Una PalabraDocumento11 páginasCA PWM Regulador para Arduino: (/) Por Favor, Introduzca Una PalabraАндэрь ЗорьгAún no hay calificaciones
- Apuntes de Variadores de OmronDocumento33 páginasApuntes de Variadores de OmronNabil Mohamed AmarAún no hay calificaciones
- Actividad 2Documento14 páginasActividad 2Gonzalez ManuelAún no hay calificaciones
- ModulaciónDocumento36 páginasModulaciónOrlando FernándezAún no hay calificaciones