También podría gustarte
- S7-200 Memoria y Escalamiento EntradaDocumento16 páginasS7-200 Memoria y Escalamiento EntradaFabian Leonardo100% (1)
- BECKHOFF-Automatizacion (2016)Documento43 páginasBECKHOFF-Automatizacion (2016)Jorge_Andril_5370100% (1)
- Prácticas de redes de datos e industrialesDe EverandPrácticas de redes de datos e industrialesCalificación: 4 de 5 estrellas4/5 (5)
- Control de Velocidad Con LabVIEW y Arduino - Docx (RESUMIDO)Documento22 páginasControl de Velocidad Con LabVIEW y Arduino - Docx (RESUMIDO)Eugenio Puche SánchezAún no hay calificaciones
- Fundamentals of industrial communications in automationDe EverandFundamentals of industrial communications in automationAún no hay calificaciones
- Práctica de Laboratorio OPCDocumento13 páginasPráctica de Laboratorio OPCOscar Julian Casadiego MachucaAún no hay calificaciones
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDe EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeAún no hay calificaciones
- Practica Nivel Con Captador de PresiónDocumento13 páginasPractica Nivel Con Captador de PresiónjoselinAún no hay calificaciones
- UF1866 - Instalación y configuración de servicios en equipos de telefoníaDe EverandUF1866 - Instalación y configuración de servicios en equipos de telefoníaAún no hay calificaciones
- Interfaz SERCOSDocumento4 páginasInterfaz SERCOSAnder EnríquezAún no hay calificaciones
- UF1872 - Implantación y configuración de pasarelasDe EverandUF1872 - Implantación y configuración de pasarelasCalificación: 5 de 5 estrellas5/5 (1)
- Funcionamiento del programa plc delta Control On-Off proporcionalDocumento9 páginasFuncionamiento del programa plc delta Control On-Off proporcionalAriel GálvezAún no hay calificaciones
- Control digital de orientación, posición y velocidad basado en movimientos de la cabeza para un prototipo de simulación de silla de ruedasDe EverandControl digital de orientación, posición y velocidad basado en movimientos de la cabeza para un prototipo de simulación de silla de ruedasAún no hay calificaciones
- Comunicación USB de Alta Velocidad Entre LABVIEW y Un Microcontrolador para La Adquisición de Datos en Tiempo RealDocumento5 páginasComunicación USB de Alta Velocidad Entre LABVIEW y Un Microcontrolador para La Adquisición de Datos en Tiempo RealpatrohellAún no hay calificaciones
- Principios del análisis de Fourier: Variaciones sobre un tema clásicoDe EverandPrincipios del análisis de Fourier: Variaciones sobre un tema clásicoAún no hay calificaciones
- Practica Triac MOCDocumento6 páginasPractica Triac MOCOmar DamianAún no hay calificaciones
- Redes de Comunicacion IndustrialesDocumento222 páginasRedes de Comunicacion IndustrialesANDRES FABRICO100% (1)
- Manual de Referencia Del Conjunto de Instrucciones Generales PLC Logix 5000Documento400 páginasManual de Referencia Del Conjunto de Instrucciones Generales PLC Logix 5000seduch100% (1)
- Matlab aplicado a telecomunicacionesDe EverandMatlab aplicado a telecomunicacionesCalificación: 5 de 5 estrellas5/5 (1)
- Manual de Tarjeta Analyzer Post PDFDocumento10 páginasManual de Tarjeta Analyzer Post PDFJose VasquezAún no hay calificaciones
- Prácticas ModbusDocumento6 páginasPrácticas ModbusJohana LaglaAún no hay calificaciones
- Unitronics Tutorial U90ladder EspDocumento95 páginasUnitronics Tutorial U90ladder EspMargarita AndreuAún no hay calificaciones
- Puerto ParaleloDocumento6 páginasPuerto ParaleloAndrés A. PavónAún no hay calificaciones
- Studio 5000 - InfoPLCDocumento4 páginasStudio 5000 - InfoPLCHenry RodriguezAún no hay calificaciones
- Clase 13 I2cDocumento80 páginasClase 13 I2cDavid Alejandro Espejo GarciaAún no hay calificaciones
- Microelectrónica-Circuitos secuenciales PLDDocumento3 páginasMicroelectrónica-Circuitos secuenciales PLDJavier LescanoAún no hay calificaciones
- IndradriveWA ES PDFDocumento630 páginasIndradriveWA ES PDFjvettonAún no hay calificaciones
- Labview ExamplesDocumento38 páginasLabview ExamplesluisAún no hay calificaciones
- Cátalogo Industrial 2020 (20200228)Documento216 páginasCátalogo Industrial 2020 (20200228)Hydro Energy GroupAún no hay calificaciones
- Historia y creación de OPCDocumento17 páginasHistoria y creación de OPCPaulina CataldoAún no hay calificaciones
- Arduino DUE Marzo2014Documento63 páginasArduino DUE Marzo2014Sherma007100% (1)
- Matrikon OPC UADocumento12 páginasMatrikon OPC UAJuan Pablo SanabriaAún no hay calificaciones
- ROBOT C-5Documento14 páginasROBOT C-5destino29Aún no hay calificaciones
- Configuración de Redes en DebianDocumento49 páginasConfiguración de Redes en DebianCaio de ChtAún no hay calificaciones
- Laboratorio COMM S71200 L33ERDocumento32 páginasLaboratorio COMM S71200 L33ERAndres Antonio Agudelo CastilloAún no hay calificaciones
- Fundamentos de Lenguaje C para PICsDocumento0 páginasFundamentos de Lenguaje C para PICssaulin1965Aún no hay calificaciones
- CirosRobotics 2013 I HSDocumento50 páginasCirosRobotics 2013 I HSDaniel Henao SantanaAún no hay calificaciones
- Informe Profibus y FoundationDocumento45 páginasInforme Profibus y FoundationPablo Alejandro Hevia-KochAún no hay calificaciones
- Manual Arduino UbidotsDocumento21 páginasManual Arduino Ubidotsmauricio alexander arias arancibiaAún no hay calificaciones
- Componentes ElectronicosDocumento11 páginasComponentes Electronicosヴィン サラテAún no hay calificaciones
- USARTDocumento12 páginasUSARTHector ASAún no hay calificaciones
- Set de Problemas Básicos PropuestosDocumento5 páginasSet de Problemas Básicos PropuestosJIRETH ELIAS PARRA BOSSA100% (1)
- Profibus y As-IDocumento8 páginasProfibus y As-IMiguel Sarco MontielAún no hay calificaciones
- PLC AnalogicoDocumento7 páginasPLC AnalogicoGiovanni HFAún no hay calificaciones
- Mic&rob 2 1 EsDocumento36 páginasMic&rob 2 1 EsCarlos RamirezAún no hay calificaciones
- P01 Modelo de Programación Del PIC18F4550Documento14 páginasP01 Modelo de Programación Del PIC18F4550Fide Alvarado100% (1)
- DC50-SOFREL AS-Es-2016-09 PDFDocumento6 páginasDC50-SOFREL AS-Es-2016-09 PDFJuan CarlosAún no hay calificaciones
- Valores Comerciales de CapacitoresDocumento3 páginasValores Comerciales de CapacitoresMicael RodiguezAún no hay calificaciones
- Sew Mdx61b EncoderDocumento72 páginasSew Mdx61b EncoderEva SuárezAún no hay calificaciones
- Conexión PLC-PC EthernetDocumento4 páginasConexión PLC-PC EthernetRichard PiedraAún no hay calificaciones
- Ejercicios ControlDocumento4 páginasEjercicios ControlAnthony YVAún no hay calificaciones
- Monitor de corriente I2C INA219Documento25 páginasMonitor de corriente I2C INA219JOSE FRANCIA ZORRILLAAún no hay calificaciones
- Curso CX8-v6Documento71 páginasCurso CX8-v6Sky BlackAún no hay calificaciones
- Fundation FieldbusDocumento28 páginasFundation Fieldbusfranzini_chrisAún no hay calificaciones
- Nota Aplicativa RS-485 VFD-PLC DELTADocumento5 páginasNota Aplicativa RS-485 VFD-PLC DELTADavidAún no hay calificaciones
- Informe 5 Micro PWMDocumento17 páginasInforme 5 Micro PWMdaniel araya perezAún no hay calificaciones
- 1.fundamentos de Redes EmergentesDocumento16 páginas1.fundamentos de Redes EmergentesSofia AldanaAún no hay calificaciones
- Bases para Sistemas de TelecomunicacionesDocumento209 páginasBases para Sistemas de Telecomunicacionespancho8gtzAún no hay calificaciones
- Comandos ESXiDocumento5 páginasComandos ESXirobertovillaAún no hay calificaciones
- 2 Medios de Transmisión de Una Red LocalDocumento14 páginas2 Medios de Transmisión de Una Red LocalAlan MourentanAún no hay calificaciones
- A: Luis Alberto Tello Cardenas: Lima, 12 de Junio 2023Documento1 páginaA: Luis Alberto Tello Cardenas: Lima, 12 de Junio 2023jorgeorellanaramosAún no hay calificaciones
- Estado Sala de ComputoDocumento3 páginasEstado Sala de ComputosistemascurAún no hay calificaciones
- 1.1 Anders, G-Patologia de La LibertadDocumento29 páginas1.1 Anders, G-Patologia de La LibertadRodrigo Rivera100% (3)
- Factores que limitan la transmisión de datosDocumento28 páginasFactores que limitan la transmisión de datosAndrea MuñozAún no hay calificaciones
- Configurando Topología Voip CiscoDocumento10 páginasConfigurando Topología Voip Ciscofranklin meranAún no hay calificaciones
- Instalación y Configuración de Un Servidor DNS en Windows ServerDocumento19 páginasInstalación y Configuración de Un Servidor DNS en Windows ServerÁngel Osiel Mondragón TrujilloAún no hay calificaciones
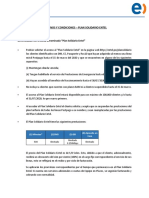
- Terminos y Condiciones Plan Solidario Entel V13 23.06Documento5 páginasTerminos y Condiciones Plan Solidario Entel V13 23.06CLARISAXAún no hay calificaciones
- 3.4.6 Packet Tracer - Configure Vlans and Trunking - Physical Mode - Es XLDocumento8 páginas3.4.6 Packet Tracer - Configure Vlans and Trunking - Physical Mode - Es XLRaul PiedyAún no hay calificaciones
- Normas para Un SiteDocumento3 páginasNormas para Un SiteFrancisco Santizo0% (1)
- Informe 5 de Lab - Cd-ChavezDocumento16 páginasInforme 5 de Lab - Cd-ChavezAngelGuerreroAún no hay calificaciones
- Helmer Ruiz - 2150504 - 3 - Tarea1Documento8 páginasHelmer Ruiz - 2150504 - 3 - Tarea1helmer ruizAún no hay calificaciones
- Planes de Internet ADSL y Dial Up de Cotel BoliviaDocumento2 páginasPlanes de Internet ADSL y Dial Up de Cotel BoliviaRomina CarvalloAún no hay calificaciones
- Xsemana Dos Protoccolo VTP DTP VlansDocumento52 páginasXsemana Dos Protoccolo VTP DTP VlansJosué Sauceda SilvaAún no hay calificaciones
- Examen Cisco Online CCNA4 V4.0 - Capitulo 7. by Alen.Documento9 páginasExamen Cisco Online CCNA4 V4.0 - Capitulo 7. by Alen.Alain Droguett Laredo100% (1)
- Aoc ManualDocumento64 páginasAoc ManualRONALD_TVAún no hay calificaciones
- Cuadro ComparativoDocumento5 páginasCuadro ComparativoLICEO SAN FERNANDOAún no hay calificaciones
- Codec g729Documento9 páginasCodec g729Agustín Lima PaisAún no hay calificaciones
- ACL Taller Seguridad II - Listas de Control de AccesoDocumento4 páginasACL Taller Seguridad II - Listas de Control de AccesoJUAN PABLO RODRIGUEZ TORRES100% (1)
- Tips Instalacion LTE 4gDocumento28 páginasTips Instalacion LTE 4gCS PS100% (3)
- Guía de Diseño de OSPFDocumento70 páginasGuía de Diseño de OSPFOmar Villarreal ZamoranoAún no hay calificaciones
- Modelos celulares sustentablesDocumento15 páginasModelos celulares sustentablesIsabel SanchezAún no hay calificaciones
- GeoXH Serie 6000Documento2 páginasGeoXH Serie 6000Eptisa Tecnologías de la InformaciónAún no hay calificaciones
- Historia de La T.V. DominicanaDocumento7 páginasHistoria de La T.V. DominicanaIndira AlexandraAún no hay calificaciones
- MPLSDocumento51 páginasMPLSMarco Antonio Bravo SantivañezAún no hay calificaciones
- TALLER DE INTEGRACION 1 Ev 1Documento15 páginasTALLER DE INTEGRACION 1 Ev 1itsDosenCLAún no hay calificaciones
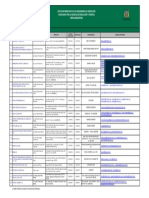
- Datos Informativos de Los Organismos de Inspección Calificados en La AgenciaDocumento1 páginaDatos Informativos de Los Organismos de Inspección Calificados en La AgenciaSilvia ErazoAún no hay calificaciones
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Resumen de El cuadro de mando integral paso a paso de Paul R. NivenDe EverandResumen de El cuadro de mando integral paso a paso de Paul R. NivenCalificación: 5 de 5 estrellas5/5 (2)
- Resumen, reseña, artículo, informe, comentario y ensayoDe EverandResumen, reseña, artículo, informe, comentario y ensayoCalificación: 4.5 de 5 estrellas4.5/5 (8)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- El lenguaje del cuerpo: Una guía para conocer los sentimientos y las emociones de quienes nos rodeanDe EverandEl lenguaje del cuerpo: Una guía para conocer los sentimientos y las emociones de quienes nos rodeanCalificación: 4 de 5 estrellas4/5 (49)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- InDELEble B2: Manual para la preparación del Diploma de EspañolDe EverandInDELEble B2: Manual para la preparación del Diploma de EspañolCalificación: 5 de 5 estrellas5/5 (1)
- Machine Learning y Deep Learning: Usando Python, Scikit y KerasDe EverandMachine Learning y Deep Learning: Usando Python, Scikit y KerasAún no hay calificaciones
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- ¡Aprende chino ya!: El mejor método para principiantes con claves sobre cómo hacer amigos y negociosDe Everand¡Aprende chino ya!: El mejor método para principiantes con claves sobre cómo hacer amigos y negociosCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Entretejer espacios para aprender y convivir en el aulaDe EverandEntretejer espacios para aprender y convivir en el aulaCalificación: 5 de 5 estrellas5/5 (1)
- Ideas que pegan (2ª Edición): Por qué algunas ideas sobreviven y otras muerenDe EverandIdeas que pegan (2ª Edición): Por qué algunas ideas sobreviven y otras muerenCalificación: 4.5 de 5 estrellas4.5/5 (20)
- UF0349: ATENCIÓN AL CLIENTE EN EL PROCESO COMERCIAL (ADGG0208) (ADGD0308)De EverandUF0349: ATENCIÓN AL CLIENTE EN EL PROCESO COMERCIAL (ADGG0208) (ADGD0308)Calificación: 2 de 5 estrellas2/5 (1)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- Introducción a los estudios del discurso multimodalDe EverandIntroducción a los estudios del discurso multimodalCalificación: 5 de 5 estrellas5/5 (1)
- EL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.De EverandEL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.Calificación: 4 de 5 estrellas4/5 (20)
- Echando una mano: 101 técnicas de andamiaje CLIL: Con sección especial de ESLDe EverandEchando una mano: 101 técnicas de andamiaje CLIL: Con sección especial de ESLCalificación: 5 de 5 estrellas5/5 (1)
- Aprender Francés - Textos paralelos - Historias sencillas (Español - Francés) BilingüeDe EverandAprender Francés - Textos paralelos - Historias sencillas (Español - Francés) BilingüeCalificación: 3.5 de 5 estrellas3.5/5 (3)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Metodología básica de instrumentación industrial y electrónicaDe EverandMetodología básica de instrumentación industrial y electrónicaCalificación: 4 de 5 estrellas4/5 (12)