También podría gustarte
- Modificacion Del Estudio de Impacto Ambiental Del Proyecto AntaminaDocumento39 páginasModificacion Del Estudio de Impacto Ambiental Del Proyecto AntaminaAngelo Alexis Chin Chopa XDAún no hay calificaciones
- Ejercicios Del Libro MaterialesDocumento7 páginasEjercicios Del Libro Materialesjhordan100% (2)
- Evaluacin de ImpactosDocumento56 páginasEvaluacin de ImpactosAngelo Alexis Chin Chopa XDAún no hay calificaciones
- Empresa FocusDocumento60 páginasEmpresa FocusAngelo Alexis Chin Chopa XDAún no hay calificaciones
- DearDocumento4 páginasDearAngelo Alexis Chin Chopa XDAún no hay calificaciones
- GRUPO #02 - Medios de Unión - ExposiciónDocumento17 páginasGRUPO #02 - Medios de Unión - ExposiciónAngelo Alexis Chin Chopa XDAún no hay calificaciones
- Ensayo, Realidad ProblematicaDocumento4 páginasEnsayo, Realidad ProblematicaAngelo Alexis Chin Chopa XDAún no hay calificaciones
- Alexis Liuya Claros (Trabajo n1)Documento8 páginasAlexis Liuya Claros (Trabajo n1)Angelo Alexis Chin Chopa XDAún no hay calificaciones
- Actibiografo 2015Documento3 páginasActibiografo 2015Rosario Cespedes perezAún no hay calificaciones
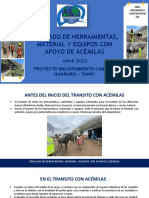
- Difusión de Pet Translado de AcemilasDocumento8 páginasDifusión de Pet Translado de AcemilasGokumana XDAún no hay calificaciones
- Diseño Norton Ejemplo 9,1 PiñonDocumento27 páginasDiseño Norton Ejemplo 9,1 PiñonFabian BaezAún no hay calificaciones
- Ensayo de FlexiónDocumento6 páginasEnsayo de FlexiónCinthya Lorena SaldañaAún no hay calificaciones
- El Urbanismo Ecológico, Salvador RuedaDocumento110 páginasEl Urbanismo Ecológico, Salvador RuedalaheviagAún no hay calificaciones
- Universidad Mayor de San Andres Nro 4Documento12 páginasUniversidad Mayor de San Andres Nro 4Ale MachacaAún no hay calificaciones
- Practica1 Dinamica Parra Roblez BenavidesDocumento16 páginasPractica1 Dinamica Parra Roblez BenavidesDivaldo Rafael Parra MallaAún no hay calificaciones
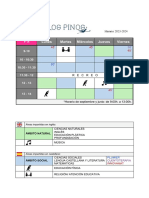
- Horarios 2023-2024-1-11Documento11 páginasHorarios 2023-2024-1-11api-293969391Aún no hay calificaciones
- Trigonometria PreuDocumento12 páginasTrigonometria PreuSebastian NuñezAún no hay calificaciones
- Evaluacion Supervisores y Planificadores de Izaje Itc-Cdp-006Documento6 páginasEvaluacion Supervisores y Planificadores de Izaje Itc-Cdp-006oscar albertoAún no hay calificaciones
- Álgebra LinealDocumento4 páginasÁlgebra Linealaxel montesAún no hay calificaciones
- Estado Energético de Agua en El Suelo. Potencial Total, y Unidades de Medida Del PotencialDocumento9 páginasEstado Energético de Agua en El Suelo. Potencial Total, y Unidades de Medida Del Potencialanali fressia eduardo romeroAún no hay calificaciones
- Procedimiento de Ajuste Ball StudDocumento6 páginasProcedimiento de Ajuste Ball Studmarco gonzalezAún no hay calificaciones
- Diseño de Mecanismos de Leva Con Seguidor de RodilloDocumento14 páginasDiseño de Mecanismos de Leva Con Seguidor de RodilloJulio Roberto Salguero RecinosAún no hay calificaciones
- 2 Métdodo ExperimentalDocumento40 páginas2 Métdodo ExperimentalARTURO REYES LEONAún no hay calificaciones
- ATS de Armado y Vaciado de LosaDocumento5 páginasATS de Armado y Vaciado de Losayoharlys garavito100% (1)
- Turismo BrasilDocumento3 páginasTurismo BrasilYhulier Edwin Condori CalleAún no hay calificaciones
- Ensayo de Corte TriaxialDocumento29 páginasEnsayo de Corte TriaxialEdison Ortiz HuamanAún no hay calificaciones
- 2017 - Analisis de La Incorporacion Del PET en Las Flexibilidad y Resistencia A La Deformacion en Un Pavimento EcologicoDocumento132 páginas2017 - Analisis de La Incorporacion Del PET en Las Flexibilidad y Resistencia A La Deformacion en Un Pavimento EcologicoJairo CavalcantiAún no hay calificaciones
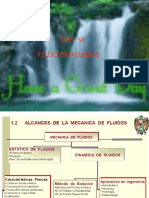
- Clase Vi-Flujo de FluidosDocumento23 páginasClase Vi-Flujo de FluidospunkdarkAún no hay calificaciones
- Laboratorio n0 1 Pendulo SimpleDocumento5 páginasLaboratorio n0 1 Pendulo SimpleYoselyn ChuquispumaAún no hay calificaciones
- Fisica Actividad 102Documento10 páginasFisica Actividad 102Jhon Stiven Pardo EncizoAún no hay calificaciones
- Guía de Trabajo en Clases Calor, Temperatura y Equilibrio TérmicoDocumento8 páginasGuía de Trabajo en Clases Calor, Temperatura y Equilibrio TérmicoNataliaSeguelValderramaAún no hay calificaciones
- LAB #2 Acople RígidoDocumento4 páginasLAB #2 Acople RígidoSamuel Flores PinayaAún no hay calificaciones
- Diseño de Un Prototipo deDocumento242 páginasDiseño de Un Prototipo deLeonardo IglesiasAún no hay calificaciones
- Caleidoscopio y TomoscopioDocumento6 páginasCaleidoscopio y TomoscopioSandra Yaneli Aguillón BecerraAún no hay calificaciones
- Lab 1 Circuitos IiDocumento11 páginasLab 1 Circuitos IiManuel MarquezAún no hay calificaciones
- Cap 15 - 4°S - CANTIDAD DE MOV IIDocumento5 páginasCap 15 - 4°S - CANTIDAD DE MOV IIluigi degollarAún no hay calificaciones
- Diseño de CocinadorDocumento38 páginasDiseño de CocinadorEmerson CaminoAún no hay calificaciones