También podría gustarte
- Solucionario Ecuaciones Diferenciales - Eduardo EspinozaDocumento320 páginasSolucionario Ecuaciones Diferenciales - Eduardo EspinozaNever71% (7)
- 1.-Introducción Motores A ReaccionDocumento31 páginas1.-Introducción Motores A ReaccionFrank RubioAún no hay calificaciones
- 2 Informe Wais IVDocumento7 páginas2 Informe Wais IVMartin Maguiña0% (1)
- Estimacion de Reservas Mediante Método Volumetrico Aplicando Distribuciones Probabilisticas - Método Montecarlo Software Crystal BallDocumento18 páginasEstimacion de Reservas Mediante Método Volumetrico Aplicando Distribuciones Probabilisticas - Método Montecarlo Software Crystal Ballmariela nava riveraAún no hay calificaciones
- Astm D2216 EspañolDocumento8 páginasAstm D2216 EspañolJoseph EspinozaAún no hay calificaciones
- Guia 4 Ciencias 3°aDocumento4 páginasGuia 4 Ciencias 3°aYulieth HeToAún no hay calificaciones
- Resolución de problemas de áreas de regiones cuadrangulares en geometríaDocumento12 páginasResolución de problemas de áreas de regiones cuadrangulares en geometríaRobertPazCAún no hay calificaciones
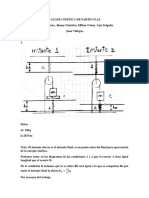
- Taller Cinética de PartículasDocumento8 páginasTaller Cinética de Partículasmilton david ochoa madridAún no hay calificaciones
- Examen Del Primer Parcial Parte IIDocumento5 páginasExamen Del Primer Parcial Parte IIRocio Andrea CasillaAún no hay calificaciones
- Semana 2 Cinética de La PartículaDocumento33 páginasSemana 2 Cinética de La PartículaAndelato La TorreAún no hay calificaciones
- Clase 2 Aux. Emerson (I-2020)Documento5 páginasClase 2 Aux. Emerson (I-2020)Edzon YujraAún no hay calificaciones
- Resolucion 2 ExamenDocumento5 páginasResolucion 2 ExamenJhojanAragonAún no hay calificaciones
- Diagrama de Bloques - CRISTHIAN QUISPEDocumento10 páginasDiagrama de Bloques - CRISTHIAN QUISPEBrian Condo RamosAún no hay calificaciones
- Semana 01-2 Movimiento CurvilineoDocumento33 páginasSemana 01-2 Movimiento CurvilineoMELITON JOSUE HUATUCO TEJEDAAún no hay calificaciones
- Esfera 1Documento6 páginasEsfera 1Brett Gonzalez CardenasAún no hay calificaciones
- Definicion DerivadasDocumento15 páginasDefinicion DerivadasJuan R. Mejias-OrtizAún no hay calificaciones
- EcuacionesDiferencialesRCDocumento20 páginasEcuacionesDiferencialesRCGerman Dario Ibague GaitanAún no hay calificaciones
- Actividad 3 Ecuaciones DiferencialesDocumento4 páginasActividad 3 Ecuaciones DiferencialesAndres Camilo Cuyato CuartasAún no hay calificaciones
- Modelo de Un Cuarto de Un VehiculoDocumento13 páginasModelo de Un Cuarto de Un VehiculoALINA SANCHEZ RODRIGUEZAún no hay calificaciones
- Parcial II (Cesar Brizuela)Documento14 páginasParcial II (Cesar Brizuela)Cesar BrizuelaAún no hay calificaciones
- El Marco Rigido Puede Girar Alrededor de Un Eje Vertical a0 Con Velocidad Angular ψDocumento3 páginasEl Marco Rigido Puede Girar Alrededor de Un Eje Vertical a0 Con Velocidad Angular ψheathmoriartiAún no hay calificaciones
- Sistema de Numeros ComplejosDocumento9 páginasSistema de Numeros Complejosavner humberto villayzan vargasAún no hay calificaciones
- Desmostración Del Teorema de GreenDocumento3 páginasDesmostración Del Teorema de GreenKarolinaJessicaMarcallaAún no hay calificaciones
- Flujo Descendente en Un TuboDocumento5 páginasFlujo Descendente en Un TuboDiana Andrea Zúñiga IzaguirreAún no hay calificaciones
- Semana 9Documento35 páginasSemana 9Renzo Callan LunaAún no hay calificaciones
- BCMV U3 EaDocumento6 páginasBCMV U3 Eagaddielolivera23Aún no hay calificaciones
- 2-EDO Lineales y BernoulliDocumento15 páginas2-EDO Lineales y BernoulliGabriel Lopez TolleroAún no hay calificaciones
- Derivadas funcionesDocumento17 páginasDerivadas funcionesLaw'raVelandiaAún no hay calificaciones
- Ecuaciones de movimiento de una partícula sobre un hiperboloideDocumento22 páginasEcuaciones de movimiento de una partícula sobre un hiperboloideNef Bueno AAún no hay calificaciones
- Movimiento Rectilíneo Uniforme (MRU) y MRUADocumento10 páginasMovimiento Rectilíneo Uniforme (MRU) y MRUASteven ArkosAún no hay calificaciones
- Calcular el rango de valores de K que garantizan la estabilidad de un sistema de controlDocumento5 páginasCalcular el rango de valores de K que garantizan la estabilidad de un sistema de controlJuanDa PalomeraAún no hay calificaciones
- República Bolivariana de Venezuela Instituto Universitario Politécnico "Santiago Mariño" Escuela de Ingeniería Eléctrica Extensión MaturínDocumento18 páginasRepública Bolivariana de Venezuela Instituto Universitario Politécnico "Santiago Mariño" Escuela de Ingeniería Eléctrica Extensión Maturínperro locoAún no hay calificaciones
- Tarea 3 301301 226Documento16 páginasTarea 3 301301 226Yerson RinconAún no hay calificaciones
- Aplicacion de FuncionesDocumento22 páginasAplicacion de FuncionesRobertPazCAún no hay calificaciones
- Función de Transferencia de Segundo Orden - PIDDocumento35 páginasFunción de Transferencia de Segundo Orden - PIDRodrigoOlivaresAún no hay calificaciones
- Ejercicio 5.31Documento10 páginasEjercicio 5.31Anyury LatorreAún no hay calificaciones
- Eda Calculo IntegralDocumento5 páginasEda Calculo IntegralShopp AiledAún no hay calificaciones
- Flujo de fluidos en tubosDocumento20 páginasFlujo de fluidos en tubosNidia Elizabeth M. DroustAún no hay calificaciones
- EjerciciosDocumento20 páginasEjerciciosAndreaAún no hay calificaciones
- 2-Sumas de Reimann y AreasDocumento8 páginas2-Sumas de Reimann y AreasRoberth RodríguezzAún no hay calificaciones
- S09.s1 - Producto EscalarDocumento17 páginasS09.s1 - Producto EscalarAlejandro MoAún no hay calificaciones
- Balotario (1) .Documento11 páginasBalotario (1) .SANDRO XAVIER CCAMA SARAAún no hay calificaciones
- Balotario (1) .Documento11 páginasBalotario (1) .SANDRO XAVIER CCAMA SARAAún no hay calificaciones
- Ed Exactas y Reducibles A ExactasDocumento15 páginasEd Exactas y Reducibles A ExactasKEVIN JAIR CORREA PALOMINOAún no hay calificaciones
- BCMV U3 EaDocumento6 páginasBCMV U3 Eagaddielolivera23Aún no hay calificaciones
- Control de posición, velocidad y aceleración de sistemas mecánicosDocumento7 páginasControl de posición, velocidad y aceleración de sistemas mecánicosJordy AlvaradoAún no hay calificaciones
- Guía01 2 2022 1Documento6 páginasGuía01 2 2022 1Luis Arrieta100% (2)
- 04 Seccion 5 Rotor y DivergenciaDocumento24 páginas04 Seccion 5 Rotor y DivergenciaCarlosAún no hay calificaciones
- Transformada de LaplaceDocumento1 páginaTransformada de LaplaceCarrillo Hernández Alam IsraelAún no hay calificaciones
- Métodos numéricos para ecuaciones diferenciales ordinariasDocumento9 páginasMétodos numéricos para ecuaciones diferenciales ordinariasMATEO ALEJANDRO PERUGACHI PADILLAAún no hay calificaciones
- Calculo Integral Tarea 1Documento10 páginasCalculo Integral Tarea 1Katherine NaranjoAún no hay calificaciones
- Trabajo Práctico Virtual #3Documento58 páginasTrabajo Práctico Virtual #3JULIO NOE GOMEZ ARAUJOAún no hay calificaciones
- APENDICEDocumento10 páginasAPENDICEVictor JeronimoAún no hay calificaciones
- Alumnos Cap 2 - Límites 2Documento19 páginasAlumnos Cap 2 - Límites 2Kevin TesfayeAún no hay calificaciones
- CAP3-Resolución Series de PotenciaDocumento10 páginasCAP3-Resolución Series de PotenciaJose Manuel OrellanaAún no hay calificaciones
- Tablas de DistribucionDocumento12 páginasTablas de DistribucionMichael David CamachoAún no hay calificaciones
- Trabajo de SismoDocumento42 páginasTrabajo de SismoRutico Jacinto Periche FiestasAún no hay calificaciones
- Sesiones 19 y 20:: Análisis Vectorial y Tensorial Aplicado A La FísicaDocumento22 páginasSesiones 19 y 20:: Análisis Vectorial y Tensorial Aplicado A La FísicamemessAún no hay calificaciones
- Modelos de sistemas discretos y continuos de un grado de libertadDocumento35 páginasModelos de sistemas discretos y continuos de un grado de libertadThalia RoblesAún no hay calificaciones
- Prueba Objetiva Final Física 1 p.s.2016 SoluciónDocumento7 páginasPrueba Objetiva Final Física 1 p.s.2016 SoluciónLuis Ernesto Aguilar LópezAún no hay calificaciones
- Ejercicios Transferencia de CalorDocumento6 páginasEjercicios Transferencia de CalorAly HerreraAún no hay calificaciones
- Modelo matemático de sistemas de primer y segundo ordenDocumento16 páginasModelo matemático de sistemas de primer y segundo ordenSebastian GutierrezAún no hay calificaciones
- Formulario Física Cuatrimestre 1Documento4 páginasFormulario Física Cuatrimestre 1cristinaAún no hay calificaciones
- Tarea de Estadistica para La Gestion Semana 4Documento8 páginasTarea de Estadistica para La Gestion Semana 4Olga Faundez Sanchez100% (1)
- Trabajo Final - Parte 1 y 2Documento47 páginasTrabajo Final - Parte 1 y 2Andres PovedaAún no hay calificaciones
- Practica8 Lab SisDigDocumento5 páginasPractica8 Lab SisDigOscar Miguel LealAún no hay calificaciones
- Caracteristicas Del BarrocoDocumento8 páginasCaracteristicas Del BarrocoDhana GonzalesAún no hay calificaciones
- NTC 535-1 MAIZ Proyecto Norma Maiz NTC 535-1Documento8 páginasNTC 535-1 MAIZ Proyecto Norma Maiz NTC 535-1Jairo100% (1)
- Cuestionario Semana 07 (C1-2) - Revisión Del IntentoDocumento8 páginasCuestionario Semana 07 (C1-2) - Revisión Del Intentoedward antony morenoAún no hay calificaciones
- PrefisiologiaDocumento17 páginasPrefisiologiaEnrique Alfonso Salinas HurtadoAún no hay calificaciones
- Minería Transporte Bajo Tierra 5Documento58 páginasMinería Transporte Bajo Tierra 5Andres Tobo100% (1)
- Capitulo XVI - ElectroquímicaDocumento7 páginasCapitulo XVI - ElectroquímicaVES18Aún no hay calificaciones
- Ejercicios EstadisticaDocumento10 páginasEjercicios EstadisticaOmar DjarinAún no hay calificaciones
- Unidad 1 - Fase 2Documento9 páginasUnidad 1 - Fase 2Eliana RodríguezAún no hay calificaciones
- S01.s1 - PPT Física y Análisis DimensionalDocumento22 páginasS01.s1 - PPT Física y Análisis DimensionalRaul Elias Campos UlloaAún no hay calificaciones
- 1 Cuestionario Cambios Físicos GeneralDocumento4 páginas1 Cuestionario Cambios Físicos GeneralMIRIAM DEYSI BAUTISTA LOPEZAún no hay calificaciones
- Moldes de marroquinería: Cómo calcular curvas y medidas con precisiónDocumento5 páginasMoldes de marroquinería: Cómo calcular curvas y medidas con precisiónGoalter PeñaAún no hay calificaciones
- Examen FinalDocumento2 páginasExamen Finalmedaly pamela vicuña guerra100% (1)
- Configuracion de Red CL-5000Documento4 páginasConfiguracion de Red CL-5000Newlin Nieves100% (1)
- Práctica 8-2da. Ley de Newton (Asignación)Documento4 páginasPráctica 8-2da. Ley de Newton (Asignación)Lis MorantesAún no hay calificaciones
- GUIA DE EJERCICIOS - DISTRIBUCION DE FRECUENCIAS-ejercicio 4Documento3 páginasGUIA DE EJERCICIOS - DISTRIBUCION DE FRECUENCIAS-ejercicio 4CarlosUchihaAún no hay calificaciones
- Estadística U: Sección 1Documento6 páginasEstadística U: Sección 1Andrés ElizaldeAún no hay calificaciones
- Informe obrasII 12Documento33 páginasInforme obrasII 12Marco Antonio Marquez VillazonAún no hay calificaciones
- Reles de Maxima TensionDocumento5 páginasReles de Maxima TensionDaniel OliveraAún no hay calificaciones
- Radio MobileDocumento54 páginasRadio MobileAngielPixiesFerAún no hay calificaciones
- GestarDocumento21 páginasGestarAngel VidalAún no hay calificaciones
- Manual de ProcedimientosDocumento12 páginasManual de ProcedimientosLuis VelezAún no hay calificaciones