También podría gustarte
- Programa Del Diplomado Mantenimiento Industrial 2023Documento3 páginasPrograma Del Diplomado Mantenimiento Industrial 2023Ricardo PayesAún no hay calificaciones
- Mildred María Jimena Ecuté Chinchilla - 72873 - 0Documento12 páginasMildred María Jimena Ecuté Chinchilla - 72873 - 0Ricardo PayesAún no hay calificaciones
- Mildred María Jimena Ecuté Chinchilla - 817756 - 0Documento19 páginasMildred María Jimena Ecuté Chinchilla - 817756 - 0Ricardo PayesAún no hay calificaciones
- Mildred María Jimena Ecuté Chinchilla - 1385870 - 0Documento18 páginasMildred María Jimena Ecuté Chinchilla - 1385870 - 0Ricardo PayesAún no hay calificaciones
- Mildred María Jimena Ecuté Chinchilla - 1174294 - 0Documento20 páginasMildred María Jimena Ecuté Chinchilla - 1174294 - 0Ricardo PayesAún no hay calificaciones
- Seriesdetiempo 210210 163411Documento5 páginasSeriesdetiempo 210210 163411Ricardo PayesAún no hay calificaciones
- 5SSostener 200902 160415Documento5 páginas5SSostener 200902 160415Ricardo PayesAún no hay calificaciones
- Mildred María Jimena Ecuté Chinchilla - 312516 - 0Documento17 páginasMildred María Jimena Ecuté Chinchilla - 312516 - 0Ricardo PayesAún no hay calificaciones
- FormatoEstandar5S 200901 154943Documento3 páginasFormatoEstandar5S 200901 154943Ricardo PayesAún no hay calificaciones
- Fundamentos de Sistemas Eléctricos de PotenciaDocumento4 páginasFundamentos de Sistemas Eléctricos de PotenciaRicardo PayesAún no hay calificaciones
- Qtiplot GuiaDocumento21 páginasQtiplot GuiaRicardo PayesAún no hay calificaciones
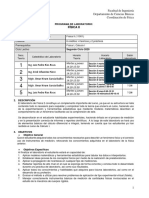
- Guía Laboratorios Física II 2C 2020Documento72 páginasGuía Laboratorios Física II 2C 2020Ricardo PayesAún no hay calificaciones
- Lab 01Documento12 páginasLab 01Ricardo PayesAún no hay calificaciones
- Lab 06Documento5 páginasLab 06Ricardo PayesAún no hay calificaciones
- Programa Ecuaciones Diferenciales Segundo CicloDocumento4 páginasPrograma Ecuaciones Diferenciales Segundo CicloRicardo PayesAún no hay calificaciones
- Información de DT Rodolfo GóchezDocumento1 páginaInformación de DT Rodolfo GóchezRicardo PayesAún no hay calificaciones
- Manual de Tracker PDFDocumento7 páginasManual de Tracker PDFRicardo PayesAún no hay calificaciones
- Programa Laboratorio FII 2C 2020Documento4 páginasPrograma Laboratorio FII 2C 2020Ricardo PayesAún no hay calificaciones
- Manual de Tracker PDFDocumento7 páginasManual de Tracker PDFRicardo PayesAún no hay calificaciones
- Clase 21Documento8 páginasClase 21Ricardo PayesAún no hay calificaciones
- Talleres Mecanica DefinitivosDocumento39 páginasTalleres Mecanica DefinitivosSara BambagüéAún no hay calificaciones
- Examen Extraordinario SECUNDARIA 2Documento9 páginasExamen Extraordinario SECUNDARIA 2MoUx NeryAún no hay calificaciones
- Innovación Del Método Vizir en Estrategias de Conservación y Mantenimiento de Carreteras Con Bajo Volumen de TránsitoDocumento2 páginasInnovación Del Método Vizir en Estrategias de Conservación y Mantenimiento de Carreteras Con Bajo Volumen de Tránsitoluz alvarezAún no hay calificaciones
- Apunte Laboratorios 2020Documento119 páginasApunte Laboratorios 2020Santiago ArceAún no hay calificaciones
- Materialparapendientes 1 BtccssDocumento11 páginasMaterialparapendientes 1 BtccssjoseangelmadridAún no hay calificaciones
- Problemas de Programación LinealDocumento2 páginasProblemas de Programación LinealWilliam Antonio Hernandez RamosAún no hay calificaciones
- Plan Remedial Grupal DiscalculiaDocumento7 páginasPlan Remedial Grupal DiscalculiaPamela Muñoz100% (1)
- Tema 1 - Determinantes TeoriaDocumento8 páginasTema 1 - Determinantes TeoriaJuan daniel Torrez vidaurreAún no hay calificaciones
- Cantidades EspectralesDocumento3 páginasCantidades EspectralesErick MecaAún no hay calificaciones
- PC 1 Simulacro 2 Solucionario PDFDocumento3 páginasPC 1 Simulacro 2 Solucionario PDFdiogoAún no hay calificaciones
- Filosofar Científicamente y Encarar La Ciencia FilosóficamenteDocumento2 páginasFilosofar Científicamente y Encarar La Ciencia FilosóficamenteMarianita Romero100% (1)
- Tutorial Como Diseñar para Serigrafia, Diseño Gráfico - Magical Art Studio PDFDocumento12 páginasTutorial Como Diseñar para Serigrafia, Diseño Gráfico - Magical Art Studio PDFCesar RojasAún no hay calificaciones
- Cálculo DiferencialDocumento16 páginasCálculo DiferencialPinAún no hay calificaciones
- Dinámica: Cinética de Partículas (Parte I)Documento31 páginasDinámica: Cinética de Partículas (Parte I)cristhian aaron vigo villarAún no hay calificaciones
- Estructura BCPDocumento18 páginasEstructura BCPElmer Tapara VenturaAún no hay calificaciones
- Actividad 4 EstadisticaDocumento8 páginasActividad 4 EstadisticaCarlos MontealegreAún no hay calificaciones
- Árbol de Decisiones EmpresaDocumento2 páginasÁrbol de Decisiones EmpresaJuan sebastian Muñoz QuintanaAún no hay calificaciones
- Guia 9 Mat100Documento9 páginasGuia 9 Mat100diegogupiAún no hay calificaciones
- Reporte Practica 1Documento7 páginasReporte Practica 1efraintibanta8213Aún no hay calificaciones
- Guia 8vo CC s3Documento4 páginasGuia 8vo CC s3Javier MartinezAún no hay calificaciones
- Notación CientíficaDocumento8 páginasNotación Científicaangela_zamorano_4Aún no hay calificaciones
- Silabo Geoestadistica 2019 II G6Documento6 páginasSilabo Geoestadistica 2019 II G6Jean Pierre Giron AbadAún no hay calificaciones
- MATEMATICA BÁSICA MG - Sc. Fernando M. Toribio RománDocumento10 páginasMATEMATICA BÁSICA MG - Sc. Fernando M. Toribio RománFERNANDOAún no hay calificaciones
- De Donde Vengo, Quien Soy y Hacia Donde Voy - Ricardo CentenoDocumento13 páginasDe Donde Vengo, Quien Soy y Hacia Donde Voy - Ricardo CentenoRicardo Centeno GuevaraAún no hay calificaciones
- Representacion Del ProcesoDocumento5 páginasRepresentacion Del ProcesoNatalia AmayaAún no hay calificaciones
- Fis Sem 05 PDFDocumento41 páginasFis Sem 05 PDFAlexander PabonAún no hay calificaciones
- Equilibrio IS LMDocumento9 páginasEquilibrio IS LMMartin Reyes ZelayaAún no hay calificaciones
- Norbert WienerDocumento4 páginasNorbert WienerDavid DNAún no hay calificaciones
- Razonamiento AproximadoDocumento9 páginasRazonamiento AproximadoXianju Yiang LiAún no hay calificaciones