También podría gustarte
- Polímeros (Semiconductores)Documento29 páginasPolímeros (Semiconductores)Aaron Garcia SanchezAún no hay calificaciones
- Introduccion A Sistemas AutomaticosDocumento5 páginasIntroduccion A Sistemas Automaticosjose joseAún no hay calificaciones
- Aa2 - La Probabilidad y Sus LeyesDocumento8 páginasAa2 - La Probabilidad y Sus LeyesyesidAún no hay calificaciones
- Practica 7 - Teoremas de Circuitos Electricos - Esime ZacatencoDocumento7 páginasPractica 7 - Teoremas de Circuitos Electricos - Esime ZacatencoMONTSERRAT AVILAAún no hay calificaciones
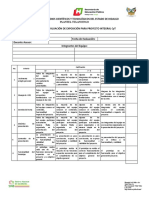
- Rubrica para Proyecto IntegralDocumento2 páginasRubrica para Proyecto IntegralFrancisco Javier HernándezAún no hay calificaciones
- Mapa Mental FelicidadDocumento1 páginaMapa Mental FelicidadFrancisco Javier HernándezAún no hay calificaciones
- Tabla Comparativa G y MDocumento1 páginaTabla Comparativa G y MFrancisco Javier HernándezAún no hay calificaciones
- Mapa ConceptualDocumento1 páginaMapa ConceptualFrancisco Javier HernándezAún no hay calificaciones
- Triptico Del Medio AmbienteDocumento2 páginasTriptico Del Medio AmbienteFrancisco Javier Hernández0% (1)
- 7 LógicaPseudoCMOSDocumento27 páginas7 LógicaPseudoCMOSROBERTO KARLO CAMPOS TIRADOAún no hay calificaciones
- Ruido en Los Sitemas de ComunicaciónDocumento14 páginasRuido en Los Sitemas de ComunicaciónLalo SalazarAún no hay calificaciones
- Evlmg1 250wllcDocumento8 páginasEvlmg1 250wllcjuan david vaca diazAún no hay calificaciones
- Teorema de Thevenin y Norton Con Fuentes IndependientesDocumento15 páginasTeorema de Thevenin y Norton Con Fuentes IndependientesgonzalangelAún no hay calificaciones
- Manual Del Controlador SciDocumento83 páginasManual Del Controlador SciHeiner ChaconAún no hay calificaciones
- Listado de Restablecimientos de Fábrica TV List 2Documento13 páginasListado de Restablecimientos de Fábrica TV List 2Geovanny SanJuanAún no hay calificaciones
- Prueba Del Clip CorsaDocumento8 páginasPrueba Del Clip CorsaMarcelo Ravena UlloaAún no hay calificaciones
- Guia 1 ElectricidadDocumento17 páginasGuia 1 ElectricidadJuan LemusAún no hay calificaciones
- Actividades #1 Conversores DAC y ADC v2.0 Con EntregableDocumento5 páginasActividades #1 Conversores DAC y ADC v2.0 Con EntregableGONZALEZ MOLINA ANGEL ABDIASAún no hay calificaciones
- Práctica 5 - 1289034-368496Documento7 páginasPráctica 5 - 1289034-368496Zyanya Galilea Estrada MenesesAún no hay calificaciones
- Electronica de PotenciaDocumento12 páginasElectronica de PotenciaEdwin MurciaAún no hay calificaciones
- Documentación LTE 700 MHZ - CooperadorDocumento2 páginasDocumentación LTE 700 MHZ - CooperadorFrancAún no hay calificaciones
- Informe de Laboratorio Taller de ElectronicaDocumento7 páginasInforme de Laboratorio Taller de ElectronicaElias TFAún no hay calificaciones
- InformeDiodo ShockleyDocumento3 páginasInformeDiodo ShockleyFelipe Ll.Aún no hay calificaciones
- PWM On The ATmega328Documento14 páginasPWM On The ATmega328Miguel Ángel Murillo RamírezAún no hay calificaciones
- Lab 7 Maquinas IIDocumento7 páginasLab 7 Maquinas IIJohan Adrian Arcos SantacruzAún no hay calificaciones
- Divisores de VoltajeDocumento18 páginasDivisores de VoltajeSebastian VelandiaAún no hay calificaciones
- Monografias MicroDocumento6 páginasMonografias MicrofrankjhonaikerguerreroestradaAún no hay calificaciones
- Insersor String Multi-MPPT para Sistemas de 1000 VCC (SG110CX)Documento2 páginasInsersor String Multi-MPPT para Sistemas de 1000 VCC (SG110CX)arlandria10Aún no hay calificaciones
- MANUAL DE TELEFONIA CELULAR UltimoDocumento92 páginasMANUAL DE TELEFONIA CELULAR UltimoArturo Della MadalenaAún no hay calificaciones
- Avance ProyectoDocumento15 páginasAvance ProyectoDANIEL ALEJANDRO OSORIO CUEVASAún no hay calificaciones
- Actividad 6 ZenerDocumento3 páginasActividad 6 ZenerGregory NolascoAún no hay calificaciones
- Ficha Tecnica Empalmadora OptronicsDocumento4 páginasFicha Tecnica Empalmadora OptronicsRuben HigueraAún no hay calificaciones
- Data Sheet Del Diodo de Silicio (1N 4001 - 1N 4007)Documento4 páginasData Sheet Del Diodo de Silicio (1N 4001 - 1N 4007)Eduardo DF7Aún no hay calificaciones
- Informe N°2 CE. DiapositivasDocumento29 páginasInforme N°2 CE. DiapositivasGiancarlo Jesus Chero QuispeAún no hay calificaciones
- Sem ResumenDocumento2 páginasSem ResumenCESAR ENRIQUE ESPINOZA MOLINAAún no hay calificaciones