También podría gustarte
- Calibración Sistema Alimentación SteinsvikDocumento11 páginasCalibración Sistema Alimentación Steinsvikpablo esteban jara reyesAún no hay calificaciones
- Eval 1Documento4 páginasEval 1Jose Alberto ContrerasAún no hay calificaciones
- Mecanica de Suelos EjerciciosDocumento12 páginasMecanica de Suelos EjerciciosHeey Gatez Balcazar0% (1)
- Espectros de Respuesta y de DiseñoDocumento22 páginasEspectros de Respuesta y de DiseñoDaniel CristanchoAún no hay calificaciones
- SOFTWARE LisafirmeDocumento14 páginasSOFTWARE LisafirmeAbdon CastroAún no hay calificaciones
- SYNCHRODocumento16 páginasSYNCHROMarisolMarinRojasAún no hay calificaciones
- Modelo Lutz ScholzDocumento21 páginasModelo Lutz ScholzMarisolMarinRojasAún no hay calificaciones
- Ejercicio Mensajeria ExpressDocumento4 páginasEjercicio Mensajeria ExpressMarisolMarinRojasAún no hay calificaciones
- C.V - Carlos ParionaDocumento4 páginasC.V - Carlos ParionaCarlos Pariona MagnoAún no hay calificaciones
- 7a.investigacion Formativa 01Documento27 páginas7a.investigacion Formativa 01AlisonEstefaniaI.SAún no hay calificaciones
- Proyeccion de Transito PDFDocumento62 páginasProyeccion de Transito PDFanimorAún no hay calificaciones
- Practica Volumen de TransitoDocumento10 páginasPractica Volumen de TransitoAlfonso Lopez Bolaños100% (1)
- Informe Parcial Transito Grupo 02Documento30 páginasInforme Parcial Transito Grupo 02TeffyBTAún no hay calificaciones
- Metodo Pendiente y DeflexionDocumento10 páginasMetodo Pendiente y DeflexionarturAún no hay calificaciones
- Solucionario PC 2Documento4 páginasSolucionario PC 2Miguel BPAún no hay calificaciones
- Taller 2 de Volumenes de TransitoDocumento2 páginasTaller 2 de Volumenes de TransitoDARWIN CAMILO RIANO GARZONAún no hay calificaciones
- Trabajo Final de Estabilidad de Taludes PDFDocumento23 páginasTrabajo Final de Estabilidad de Taludes PDFClaudia Maldonado Mojonero0% (1)
- Ejercicios de OptimizacionDocumento8 páginasEjercicios de Optimizacionnose126Aún no hay calificaciones
- Mecanica de Suelos Ejercicios Resueltos PDFDocumento28 páginasMecanica de Suelos Ejercicios Resueltos PDFVictor Orihuela DamianAún no hay calificaciones
- Ejercicios GranulometríaDocumento15 páginasEjercicios GranulometríaSmith RodriguezAún no hay calificaciones
- F Auni Dom Sem02Documento2 páginasF Auni Dom Sem02Only Nio YTAún no hay calificaciones
- Problem 6.127 Meriam Dynamics 2th EditionDocumento4 páginasProblem 6.127 Meriam Dynamics 2th EditionJuan Carlos Gonzalez ZapataAún no hay calificaciones
- Segundo Examen Parcial de Costos y PresupuestosDocumento2 páginasSegundo Examen Parcial de Costos y PresupuestosWilliamYucraAún no hay calificaciones
- Flujo de Vehiculos PDFDocumento6 páginasFlujo de Vehiculos PDFjowacocoAún no hay calificaciones
- Actividad GRAFICAS MRUADocumento1 páginaActividad GRAFICAS MRUAyeyfred100% (1)
- Calculo de Tiempos de Semaforos - VideosDocumento1 páginaCalculo de Tiempos de Semaforos - VideosEdison Jerson Ramirez ToledoAún no hay calificaciones
- Examen de Carreteras-Tema 2Documento25 páginasExamen de Carreteras-Tema 2Peter ParkerAún no hay calificaciones
- 1.0 Parámetros Del TránsitoDocumento58 páginas1.0 Parámetros Del TránsitoJesus Victor Miraval Pena0% (1)
- Ejercicios de Aplicacic3b3n 2Documento4 páginasEjercicios de Aplicacic3b3n 2Fran Francito CHAún no hay calificaciones
- Dimensionamiento de Muros de RetenciónDocumento6 páginasDimensionamiento de Muros de RetenciónPaúl OrOsAún no hay calificaciones
- Trabajo Final Geotecnia Grupo 4Documento16 páginasTrabajo Final Geotecnia Grupo 4Jhonathan Paucar GomezAún no hay calificaciones
- Taller N3° Volumenes de Transito PDFDocumento7 páginasTaller N3° Volumenes de Transito PDFDavid Leandro Ardila AristizabalAún no hay calificaciones
- Calcular La Resistencia Equivalente Del Circuito de La FiguraDocumento2 páginasCalcular La Resistencia Equivalente Del Circuito de La Figura2008eeAún no hay calificaciones
- 0822 Transportes Clase 05 Analisis de Segmentos e InterseccionesDocumento25 páginas0822 Transportes Clase 05 Analisis de Segmentos e Interseccionesalexivan_cgAún no hay calificaciones
- Samartin 035Documento228 páginasSamartin 035madridcapitalAún no hay calificaciones
- 1 Características Físicas Del Movimiento 1Documento5 páginas1 Características Físicas Del Movimiento 1Victor PancaAún no hay calificaciones
- 2DO EXAMEN PARCIAL INGENIERIA DE TRANSITO Abril de 2020 PDFDocumento2 páginas2DO EXAMEN PARCIAL INGENIERIA DE TRANSITO Abril de 2020 PDFJoel Lopez PanaAún no hay calificaciones
- Práctica de Ingeniería de Tránsito 2013Documento7 páginasPráctica de Ingeniería de Tránsito 2013nachita1992Aún no hay calificaciones
- Ingenieria de TransitoDocumento101 páginasIngenieria de TransitoDaniel E Chinguel AguilarAún no hay calificaciones
- Momento Flector - Lineas de Influencia - L 10mDocumento6 páginasMomento Flector - Lineas de Influencia - L 10mDaniel Rojas CisnerosAún no hay calificaciones
- Ejercicios de VolumenesDocumento8 páginasEjercicios de VolumenesFabricio TisocAún no hay calificaciones
- Caracteristica Del t3s2 PDFDocumento89 páginasCaracteristica Del t3s2 PDFluisAún no hay calificaciones
- Seminario Examen Parcial 2020-1e PDFDocumento101 páginasSeminario Examen Parcial 2020-1e PDFWilmer Cordova CruzAún no hay calificaciones
- 1er Parcial TransitoDocumento8 páginas1er Parcial TransitoEnmanuel Perez BonillaAún no hay calificaciones
- Problemas Tipicas de Mecanica de Suelos 1Documento7 páginasProblemas Tipicas de Mecanica de Suelos 1Yomar Sinche CrispinAún no hay calificaciones
- Capitulo Vi Analisis Dimensional y Semejanza Hidraulica PDFDocumento9 páginasCapitulo Vi Analisis Dimensional y Semejanza Hidraulica PDFNilton Poma PaucarAún no hay calificaciones
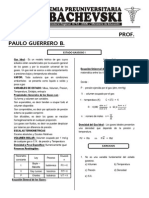
- Quimica GasesDocumento3 páginasQuimica GasesPaulo Cesar Guerrero BustamanteAún no hay calificaciones
- Final Final TransitoDocumento43 páginasFinal Final TransitoJesús Flores Hernández0% (1)
- SemaforosDocumento240 páginasSemaforosJuan David BoteroAún no hay calificaciones
- Los Movimientos en Modelo y Prototipo Tienen Similitud Cinemática Si Partículas Homologas Llegan A Puntos Homólogos en Tiempos HomólogosDocumento2 páginasLos Movimientos en Modelo y Prototipo Tienen Similitud Cinemática Si Partículas Homologas Llegan A Puntos Homólogos en Tiempos HomólogosAnonymous T97Q4jyAAB100% (1)
- Ejercicio Circuito Fiel 01Documento1 páginaEjercicio Circuito Fiel 01Renato VinhoAún no hay calificaciones
- Experimento de La Energía Potencial ElásticaDocumento15 páginasExperimento de La Energía Potencial Elásticadonnyperez25Aún no hay calificaciones
- Cap 3 (Volumen) Carac de TransitoDocumento36 páginasCap 3 (Volumen) Carac de TransitoKevin Alejandro Fernandez LopezAún no hay calificaciones
- Manual para Planificar y Realizar Un ProyectoDocumento6 páginasManual para Planificar y Realizar Un ProyectoClauida M NaranjoAún no hay calificaciones
- Trabajo Final PeriglaciarDocumento20 páginasTrabajo Final PeriglaciarBriceño P Marilyn Del CAún no hay calificaciones
- Grupo N°01Documento45 páginasGrupo N°01MarisolMarinRojasAún no hay calificaciones
- VISSIMDocumento8 páginasVISSIMLeonardo RojaAún no hay calificaciones
- Vissim UltimateDocumento23 páginasVissim UltimateJuan Carlos YupayccanaAún no hay calificaciones
- Alcance de Software en Modelacion de TransitoDocumento12 páginasAlcance de Software en Modelacion de TransitoDaniel CorderoAún no hay calificaciones
- Ventajas VissimDocumento1 páginaVentajas Vissimrhh_artistaAún no hay calificaciones
- Dispositivos para La Modelación y Control Del Tránsito Por CarreteraDocumento11 páginasDispositivos para La Modelación y Control Del Tránsito Por Carreteramafer castellanosAún no hay calificaciones
- Alcance de Los Softwares de Modelación en El TransitoDocumento18 páginasAlcance de Los Softwares de Modelación en El TransitoDania Marlen ValenzuelaAún no hay calificaciones
- Análisis Operacional en Vissim para Una IntersecciónDocumento16 páginasAnálisis Operacional en Vissim para Una IntersecciónBryan CancimanceAún no hay calificaciones
- Programas de Modelacion de TransitoDocumento3 páginasProgramas de Modelacion de Transitolauraximenauva100% (1)
- Integración de infraestructura vehicular: Descubriendo conocimientos y avances a través de la visión por computadoraDe EverandIntegración de infraestructura vehicular: Descubriendo conocimientos y avances a través de la visión por computadoraAún no hay calificaciones
- Caso Practico MariDocumento3 páginasCaso Practico MariMarisolMarinRojasAún no hay calificaciones
- Grupo N°01Documento45 páginasGrupo N°01MarisolMarinRojasAún no hay calificaciones
- Plan Operativo de Una EmpresaDocumento9 páginasPlan Operativo de Una EmpresaMarisolMarinRojasAún no hay calificaciones
- Concreto PostensadoDocumento23 páginasConcreto PostensadoMarisolMarinRojasAún no hay calificaciones
- Trabajos en La Via PublicaDocumento36 páginasTrabajos en La Via PublicaMarisolMarinRojasAún no hay calificaciones
- Informe Final - Seguimiento de ObraDocumento36 páginasInforme Final - Seguimiento de ObraMarisolMarinRojas100% (1)
- Formulario Irrifacion - UncDocumento18 páginasFormulario Irrifacion - UncMarisolMarinRojasAún no hay calificaciones
- IMG ExamenDocumento1 páginaIMG ExamenMarisolMarinRojasAún no hay calificaciones
- ALBAÑILERÍAp 7Documento6 páginasALBAÑILERÍAp 7MarisolMarinRojas0% (1)
- 1.2 Variación de Las Fuerzas InternasDocumento7 páginas1.2 Variación de Las Fuerzas InternasMarisolMarinRojasAún no hay calificaciones
- Estructuras HidráulicasDocumento32 páginasEstructuras HidráulicasMarisolMarinRojasAún no hay calificaciones
- Proyecto HuarmeyDocumento4 páginasProyecto Huarmeychabelly gabriela gurmendi porrasAún no hay calificaciones
- INFORME - Lab 02 - HMI - Diseño HMIDocumento23 páginasINFORME - Lab 02 - HMI - Diseño HMICarlos Eduardo Vásquez BolañosAún no hay calificaciones
- Factura de TigoDocumento1 páginaFactura de TigoMaria OrellanaAún no hay calificaciones
- Programación ENTERADocumento3 páginasProgramación ENTERALuis Angel Garcia RodriguezAún no hay calificaciones
- Tipos de Encendido CdiDocumento9 páginasTipos de Encendido CdiMaria Fernanda Perdomo GarciaAún no hay calificaciones
- Transporte MarítimoDocumento30 páginasTransporte MarítimoEngel Quellwasser LariselAún no hay calificaciones
- Mapa Monoblock GrupoDocumento1 páginaMapa Monoblock GrupoJhon SánchezAún no hay calificaciones
- Control ElectrioDocumento5 páginasControl ElectrioAdolfo SandovalAún no hay calificaciones
- Estudio de Prefactibilidad de Una Granja para Engorde deDocumento6 páginasEstudio de Prefactibilidad de Una Granja para Engorde dehuavi109398Aún no hay calificaciones
- M4 - Seguridad de Redes y PeriféricosDocumento35 páginasM4 - Seguridad de Redes y PeriféricosCésar Ojeda AlvaradoAún no hay calificaciones
- Norma Chilena Oficial 347 Modificada Control de CalidadDocumento2 páginasNorma Chilena Oficial 347 Modificada Control de Calidadabelardo1983Aún no hay calificaciones
- Lisbeth Alexandra Jurado MendozaDocumento56 páginasLisbeth Alexandra Jurado Mendozarewaxa7Aún no hay calificaciones
- Principios Del CNCDocumento2 páginasPrincipios Del CNCCracatoasAún no hay calificaciones
- Trabajo InvestigaNOCcion NOC VFinalDocumento22 páginasTrabajo InvestigaNOCcion NOC VFinalJoseph Alfaro SotoAún no hay calificaciones
- Laboratorio1 - Subneteo de RedesDocumento3 páginasLaboratorio1 - Subneteo de RedesLeidy Cifuentes MartinezAún no hay calificaciones
- Avance 2Documento23 páginasAvance 2Luis Mario Covarrubias VazquezAún no hay calificaciones
- Ficha 2-4-6Documento3 páginasFicha 2-4-6Gustavo Florez0% (1)
- Diseño de Filtros Digitales FIR Utilizando FPGADocumento6 páginasDiseño de Filtros Digitales FIR Utilizando FPGACarlos Alberto Rey SotoAún no hay calificaciones
- Inglés IIDocumento106 páginasInglés IIHelena VelázquezAún no hay calificaciones
- Fase 3 - Martha PradoDocumento5 páginasFase 3 - Martha PradoNohora JoyaAún no hay calificaciones
- Primer TrabajoDocumento24 páginasPrimer TrabajoLIDES FERNANDEZ SALDIVARAún no hay calificaciones
- Pnfi Programa de A AprobadoDocumento178 páginasPnfi Programa de A Aprobadogabomayzgonzalez100% (1)
- 3.3 CondicionalesDocumento9 páginas3.3 CondicionalesMontoya Vallejo Angela NereidaAún no hay calificaciones
- Trabajo Grupal o Individual: Sistema CRM Aplicación PracticaDocumento6 páginasTrabajo Grupal o Individual: Sistema CRM Aplicación PracticaRaul Meneses100% (1)
- Modelos Deterministas Inventario GO IDocumento10 páginasModelos Deterministas Inventario GO INaoto MikaAún no hay calificaciones
- Clase 1-Introducción Al Dibujo Asistido Por ComputadoraDocumento22 páginasClase 1-Introducción Al Dibujo Asistido Por ComputadoraJorge VallejosAún no hay calificaciones
- Memoria de Calculo Estructural de Muro de ContencionDocumento16 páginasMemoria de Calculo Estructural de Muro de ContencionMiguel LopezAún no hay calificaciones
- Valor Ganado - Yorka Novoa SucariDocumento192 páginasValor Ganado - Yorka Novoa SucariYorka NovoaAún no hay calificaciones