METODOS DE CÁLCULO
METODO TANGENCIAL (ANGULO TERMINAL)
METODO TANGENCIAL BALANCEADO
METODO DE RADIO DE CURVATURA
METODO DE CURVATURA MINIMA
SEVERIDAD DE LA PATA DE PERRO
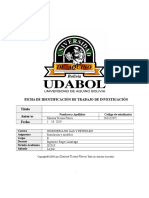
METODO TANGENCIAL BALANCEADO
Funciona igual que el metodo tangencial, solo que en lugar de
tomar la sección perforada entre dos estaciones como una sola
línea recta, divide la longitud de la sección en dos.
La línea recta superior o de menor profundidad está definida por los
ángulos de inclinación y dirección, θ1 y β1.
la sección inferior o de mayor profundidad por los ángulos θ2 y β2
la longitud de cada segmento es igual a la longitud total entre las
dos estaciones divida entre 2.
La figura muestra un ejemplo de como se representa el método en una
sección perforada del pozo.
Este es un método muy popular, ya que produce resultados
exactos y es fácil de usar con la ayuda de una calculadora de
mano.
Por esta razón es muy usado en la práctica mientras se está
perforando el pozo, siempre y cuando la distancia entre las
estaciones de medición o surveys no sea muy grande.
Este método ha demostrado ser muy poco confiable en los pozos
verticales debido a que se basa en un promedio de los ángulos
construidos, de los cuales carece un pozo vertical.
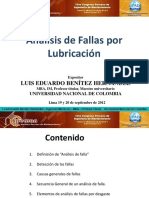
METODO DE RADIO DE CURVATURA
En este método se utilizan los ángulos medidos en las dos estaciones de
registro consecutivas, generando una curva espacial con la cual se
representa la trayectoria que describe el pozo.
Se asume que el curso del agujero representa la trayectoria de una curva
suave que pasa a través de las estaciones de registro, representada por una
serie de segmentos circulares o esféricos.
Este método a diferencia de los anteriores que consideraban la trayectoria
de la sección del pozo perforada como una línea recta, considera la sección
como una línea circular tanto el plano vertical como en el plano horizontal.
El arco formado por la línea circular es tangencial tanto a la
inclinación como a la dirección en cada estación de medición de
registro direccional (survey).
Como se muestra en la figura la trayectoria del pozo puede ser
descrita como un arco en el plano vertical, lo que hace que se
asemeje a la cara de un cilindro vertical.
Formulas utilizadas en el metodo de radio de curvatura:
El desplazamiento horizontal (∆H) puede ser encontrado por:
Con este método se obtienen mejores resultados que los del
método de ángulo promedio en secciones del pozo donde la
trayectoria se asemeja a un arco circular (por ejemplo en la
sección de construcción de ángulo)
Sin embargo, como establece un radio constante, tiende a tener
un error en secciones de trayectoria largas, debido a que la
construcción del ángulo no es constante durante toda la sección.
METODO DE CURVATURA MÍNIMA
Este método también comprende muchos cálculos complejos que requieren
computadora programable, es el de mejor justificación teórica y por
consiguiente el más aplicable a casi cualquier pozo.
Este método en realidad es una combinación del método tangencial
balanceado y el método de radio de curvatura ya que asume, sin embargo,
en vez de asemejar la trayectoria del pozo entre dos secciones como dos
líneas rectas, este método reemplaza a las líneas rectas por las de arcos
circulares.
Esto se hace mediante la aplicación de un factor de relación basado en la
cantidad de flexión de la trayectoria del pozo entre las dos estaciones de la
sección perforada (ángulo de la pata de perro).
El ángulo de la pata perro puede ser calculado con:
De la figura 4 se puede observar que el factor de relación F puede
ser calculado desde:
Las ecuaciones para el método de mínima curvatura pueden ser
resumidas como sigue:
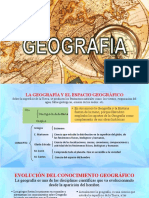
SEVERIDAD DE LA PATA DE PERRO
Para encontrar la fórmula para calcular el ángulo de pata de perro usado
en los métodos anteriores, se considerará el registro de medición
direccional, en la estación superior los ángulos de inclinación y el azimut
tiene que ser representados como θ1 y β1.
Para la estación inferior los ángulos serán representados como θ2 y β2.
Estos ángulos definen los dos segmentos de línea recta los cuales, su
longitud está definida como L1 y L2.
. El valor del ángulo ϕ puede ser determinado por la consideración del
triángulo formado por las líneas L1, L2, y L3. La longitud real de L3
puede ser determinada considerando la profundidad vertical verdadera y
el desplazamiento horizontal entre las estaciones 1 y 2:
El cambio total del ángulo ϕ entre estos dos segmentos de recta se
muestra en el diagrama de la Figura:
∆H podría ser obtenida desde la proyección horizontal de L1 y L2
mediante la aplicación de la regla del coseno:
La severidad de la pata de perro es calculada al dividir el ángulo de
pata de perro entre la longitud del tramo de trayectoria, y es
expresada en términos de grados entre 100 pies o 30 metros.
α = ángulo de la pata de perro (en grados)
L = Diferencia en la profundidad del survey (pies o metros)
DLS = Severidad e la pata de perro (Grados/ 100 pies ft)
GRACIAS POR SU
ATENCIÓN
También podría gustarte
- Mapa de Bermejo PDFDocumento1 páginaMapa de Bermejo PDFJimenaAún no hay calificaciones
- Mapa de Bermejo PDFDocumento1 páginaMapa de Bermejo PDFJimenaAún no hay calificaciones
- Campo Bermejo PorosidadDocumento19 páginasCampo Bermejo PorosidadJimenaAún no hay calificaciones
- Proyecto de Inversion Van y TirDocumento21 páginasProyecto de Inversion Van y TirJimena100% (1)
- Grupo ARGIM Comercializacion InformeDocumento74 páginasGrupo ARGIM Comercializacion InformeJimenaAún no hay calificaciones
- Grupo Éclair - Metologia de La Investigacion - Paralelo BDocumento3 páginasGrupo Éclair - Metologia de La Investigacion - Paralelo BJimenaAún no hay calificaciones
- Ximena Ticona-Metologia de La Investigacion-Objetivos Especificos y Generales - Paralelo BDocumento6 páginasXimena Ticona-Metologia de La Investigacion-Objetivos Especificos y Generales - Paralelo BJimenaAún no hay calificaciones
- Monografia de PiepesimDocumento25 páginasMonografia de PiepesimJimenaAún no hay calificaciones
- Practica 4Documento16 páginasPractica 4JimenaAún no hay calificaciones
- Proyecto de RentabilidadDocumento2 páginasProyecto de RentabilidadJimenaAún no hay calificaciones
- Viernes 8Documento26 páginasViernes 8JimenaAún no hay calificaciones
- Monografia de La Ley 3058, Por Ximena PDFDocumento12 páginasMonografia de La Ley 3058, Por Ximena PDFJimenaAún no hay calificaciones
- Ticona Practica 2Documento11 páginasTicona Practica 2JimenaAún no hay calificaciones
- Exposicion de Cristall BallDocumento19 páginasExposicion de Cristall BallJimenaAún no hay calificaciones
- Dosier de Produccion Petrolera PDFDocumento28 páginasDosier de Produccion Petrolera PDFJimenaAún no hay calificaciones
- Critall Ball-1Documento18 páginasCritall Ball-1JimenaAún no hay calificaciones
- Prueba Isocronal de Produccion IIDocumento41 páginasPrueba Isocronal de Produccion IIJimenaAún no hay calificaciones
- Dosier de Produccion PetroleraDocumento28 páginasDosier de Produccion PetroleraJimenaAún no hay calificaciones
- Tarea 4 Realidad NacionalDocumento7 páginasTarea 4 Realidad NacionalEva MoranAún no hay calificaciones
- Examen Parcial IDocumento3 páginasExamen Parcial ISarita Lizano tolentinoAún no hay calificaciones
- 6 Ejercicios TerapéuticosDocumento7 páginas6 Ejercicios TerapéuticosMilena SfarcicAún no hay calificaciones
- Acerca Del Concepto de Wu WeiDocumento8 páginasAcerca Del Concepto de Wu WeiMarco HerreraAún no hay calificaciones
- Informe Psicológico Jose AlejandroDocumento4 páginasInforme Psicológico Jose AlejandroMiguel Angel Moreno Rodriguez100% (3)
- Bomba RotativaDocumento8 páginasBomba RotativaÑCristhian MantuanoAún no hay calificaciones
- Proyecto de Inteligencia HarvardDocumento9 páginasProyecto de Inteligencia HarvardRosa HerreraAún no hay calificaciones
- Latex Tablas Apuntes10Documento12 páginasLatex Tablas Apuntes10Jose VIadimirAún no hay calificaciones
- DDHH en El Oriente Boliviano PDFDocumento77 páginasDDHH en El Oriente Boliviano PDFJosé PazAún no hay calificaciones
- 9.luis Benitez - COLOMBIA PDFDocumento80 páginas9.luis Benitez - COLOMBIA PDFChristian SantillanAún no hay calificaciones
- 02.-Procedimiento Seguro Picado de Hormigon - Rev 0Documento13 páginas02.-Procedimiento Seguro Picado de Hormigon - Rev 0prevencion JBAAún no hay calificaciones
- AlcalinidadDocumento18 páginasAlcalinidadRogerCárdenasAún no hay calificaciones
- Desigualdades: Grado 11Documento14 páginasDesigualdades: Grado 11David RamirezAún no hay calificaciones
- Informe Tecnico Ambiental de Algarrobo MagdalenaDocumento38 páginasInforme Tecnico Ambiental de Algarrobo MagdalenaMYRIAM LINERO QUEVEDO100% (1)
- Implementación de Un Sitema de Gestiíon Ambiental para La Empresa Constructora Ahec SRL Basado en La Norma Iso 14001Documento7 páginasImplementación de Un Sitema de Gestiíon Ambiental para La Empresa Constructora Ahec SRL Basado en La Norma Iso 14001MaryAún no hay calificaciones
- 1 Semana GeografiaDocumento16 páginas1 Semana GeografiaAmigo En CuscoAún no hay calificaciones
- Guías de Proceso Dr. BalarezoDocumento17 páginasGuías de Proceso Dr. BalarezojaviAún no hay calificaciones
- Modelo de NegocioDocumento1 páginaModelo de NegocioEstrella ERAún no hay calificaciones
- PD1 (Fila B)Documento2 páginasPD1 (Fila B)75353182Aún no hay calificaciones
- Estudio Actuación Administrativa AutomatizadaDocumento333 páginasEstudio Actuación Administrativa AutomatizadaNicky SantoroAún no hay calificaciones
- Tarea 1 Segundo ParcialDocumento10 páginasTarea 1 Segundo ParcialBelindaOrellanaAún no hay calificaciones
- Consonante MDocumento4 páginasConsonante MWendy DominguezAún no hay calificaciones
- Rendición de Caja Chica ModeloDocumento6 páginasRendición de Caja Chica ModeloPool Pinelo GomezAún no hay calificaciones
- Manual de Instalacion de Nod32 y Eset SmartDocumento17 páginasManual de Instalacion de Nod32 y Eset Smartrobert789789Aún no hay calificaciones
- Proyecto de ConstructoraDocumento76 páginasProyecto de Constructorasilvia100% (1)
- Plan de Trabajo UPSDocumento7 páginasPlan de Trabajo UPSObi Wan BenitoAún no hay calificaciones
- PLATÓN Y ARISTOTELES DOS VISIONES (Luis Navarro)Documento2 páginasPLATÓN Y ARISTOTELES DOS VISIONES (Luis Navarro)Jhonatan Estiven Navarro AcunaAún no hay calificaciones
- Teoria Mov Parav Mcu McuvDocumento24 páginasTeoria Mov Parav Mcu McuvhelberhewllAún no hay calificaciones
- LOZANO MANCHA JONATHAN ABISAI - Actividad 1Documento11 páginasLOZANO MANCHA JONATHAN ABISAI - Actividad 1Lozano Mancha JonathanAún no hay calificaciones
- Fernandez Gamonal - Gamarra QuevedoDocumento206 páginasFernandez Gamonal - Gamarra QuevedoLeonor ArévaloAún no hay calificaciones