También podría gustarte
- Transferencia de CalorDocumento10 páginasTransferencia de CalorEduardoCastilloPalenciaAún no hay calificaciones
- Tren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadDe EverandTren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadAún no hay calificaciones
- Almacenamiento De Energía Del Volante: Aumento o disminución de la velocidad, para añadir o extraer potenciaDe EverandAlmacenamiento De Energía Del Volante: Aumento o disminución de la velocidad, para añadir o extraer potenciaAún no hay calificaciones
- Televisor Láser: Llévate el cine a casa con una impresionante experiencia 4K Ultra-HDDe EverandTelevisor Láser: Llévate el cine a casa con una impresionante experiencia 4K Ultra-HDAún no hay calificaciones
- Estimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareDe EverandEstimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareAún no hay calificaciones
- Guia Laboratorio 1 FlowCode PDFDocumento16 páginasGuia Laboratorio 1 FlowCode PDF890380Aún no hay calificaciones
- Perfiles Aerodinamicos 2022Documento59 páginasPerfiles Aerodinamicos 2022Nicolás CraigAún no hay calificaciones
- Ala Aeroelástica Activa: Mejore la maniobrabilidad de la aeronave a velocidades transónicas y supersónicasDe EverandAla Aeroelástica Activa: Mejore la maniobrabilidad de la aeronave a velocidades transónicas y supersónicasAún no hay calificaciones
- Aerorreactores Master - Tema 1 - Actuaciones - V2-CompressedDocumento125 páginasAerorreactores Master - Tema 1 - Actuaciones - V2-CompresseddavidAún no hay calificaciones
- Pirámide Cim PDFDocumento8 páginasPirámide Cim PDFJulian ToscanoAún no hay calificaciones
- 1987 2014 PDFDocumento144 páginas1987 2014 PDFOscar Alejandro Rosas CasillasAún no hay calificaciones
- Gráfico Ventajas y Desventajas y SimbologiaDocumento3 páginasGráfico Ventajas y Desventajas y SimbologiaLuisana Isabel DoranteAún no hay calificaciones
- Ondas de ChoqueDocumento6 páginasOndas de ChoqueSantiago XavierAún no hay calificaciones
- Control Numérico Por ComputadoraDocumento7 páginasControl Numérico Por ComputadorajlAún no hay calificaciones
- Cap7 PDFDocumento3 páginasCap7 PDFAshley JohnsonAún no hay calificaciones
- Informe ProteusDocumento6 páginasInforme ProteusSamirAún no hay calificaciones
- Monitoreo de Cargas en Maquinas. JUAN FELIPE URIBE C.1824420Documento4 páginasMonitoreo de Cargas en Maquinas. JUAN FELIPE URIBE C.1824420JUAN FELIPE URIBE CIFUENTESAún no hay calificaciones
- Fuerza de Empuje en TurbinasDocumento11 páginasFuerza de Empuje en TurbinasRober Moises Chumbe SoveroAún no hay calificaciones
- Sistemas Electronicos DigitalesDocumento16 páginasSistemas Electronicos DigitalesLogan ValerioAún no hay calificaciones
- Freecad EspañolDocumento14 páginasFreecad EspañolAnonymous v4xgNzRawWAún no hay calificaciones
- M865 - Sistemas Modernos de Producción PDFDocumento10 páginasM865 - Sistemas Modernos de Producción PDFAlberto CortezAún no hay calificaciones
- lf1 335Documento28 páginaslf1 335Walter ZalazarAún no hay calificaciones
- Cuestionario Unidad 2 Sistemas Electricos de La AeronaveDocumento6 páginasCuestionario Unidad 2 Sistemas Electricos de La AeronaveAcosta Lopez Dylan EmilianoAún no hay calificaciones
- Partes Principales de Un Motor de Combustión InternaDocumento10 páginasPartes Principales de Un Motor de Combustión InternaJimena RobledoAún no hay calificaciones
- Tutoriales Ros PDFDocumento23 páginasTutoriales Ros PDFVirginia Solorzano100% (1)
- Optimización TopológicaDocumento29 páginasOptimización TopológicamartinAún no hay calificaciones
- 15D FMSDocumento24 páginas15D FMSEnrique Rubio FernándezAún no hay calificaciones
- Diseño de Perfiles AerodinámicosDocumento145 páginasDiseño de Perfiles AerodinámicosADRIAN GABRIEL BRAVO MONTOYAAún no hay calificaciones
- Excel Con Aplicaciones en Ingenieria 1Documento71 páginasExcel Con Aplicaciones en Ingenieria 1linfatico100% (1)
- Ingeniería de Fabricación ResumenDocumento50 páginasIngeniería de Fabricación ResumenVíctor Balló VelaAún no hay calificaciones
- Clasificación de PerfilesDocumento4 páginasClasificación de PerfilesUlises SantiagoAún no hay calificaciones
- Ebook Teoria Antenas PDFDocumento332 páginasEbook Teoria Antenas PDFDeyvin Joan Orjuela CastilloAún no hay calificaciones
- Ciclo Joule BraytonDocumento14 páginasCiclo Joule BraytonCHARLES HUMBERTOAún no hay calificaciones
- Ventilación IndustrialDocumento7 páginasVentilación IndustrialMiguel Angel RaciteAún no hay calificaciones
- Practica Sesion 2Documento10 páginasPractica Sesion 2JhamilRiosOrdoñezAún no hay calificaciones
- Exposicion LubricantesDocumento85 páginasExposicion LubricantesmauricioAún no hay calificaciones
- Expresión Gráfica en Ingeniería Eléctrica: Asignatura de GradoDocumento11 páginasExpresión Gráfica en Ingeniería Eléctrica: Asignatura de GradoRUDY MAMANIAún no hay calificaciones
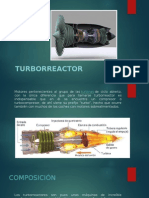
- TurborreactoresDocumento13 páginasTurborreactoresJorge Mamani Moya100% (2)
- Lab 3 - Ingenieria Del Vehiculo - 2021-2Documento5 páginasLab 3 - Ingenieria Del Vehiculo - 2021-2Henry Sullca CcorahuaAún no hay calificaciones
- Control SupervisadoDocumento17 páginasControl SupervisadocasntzmtAún no hay calificaciones
- Acoplamiento de AlternadoresDocumento10 páginasAcoplamiento de AlternadoresWil LiamAún no hay calificaciones
- ADFDocumento40 páginasADFJose Antonio Muñoz QuispeAún no hay calificaciones
- Laboratorio-07-DCS-Redes Ethernet TCPIP - Comunicacion Modbus TCP RTUNMJ, KDocumento10 páginasLaboratorio-07-DCS-Redes Ethernet TCPIP - Comunicacion Modbus TCP RTUNMJ, Kjose velardeAún no hay calificaciones
- Balancin Motor HeliceDocumento23 páginasBalancin Motor HelicePakita94100% (2)
- Asistencia en TierraDocumento7 páginasAsistencia en TierraValentina Moreno Morales100% (1)
- AgoDic 2012 - Cap 1 IntroDocumento25 páginasAgoDic 2012 - Cap 1 IntroAdrian MorenoAún no hay calificaciones
- Concepto Geométrico Del Perfil AlarDocumento9 páginasConcepto Geométrico Del Perfil AlarJhonny RosalesAún no hay calificaciones
- Motor Generador de Polos Regrabables PDFDocumento25 páginasMotor Generador de Polos Regrabables PDFEdwin Camilo Delgado Martinez100% (1)
- Sombrilla Robótica InformeDocumento17 páginasSombrilla Robótica Informediego ivan perea montealegreAún no hay calificaciones
- Control SupervisorDocumento10 páginasControl SupervisorTacoMedinaOscarAún no hay calificaciones
- Curso en Línea Programación de Microcontroladores Industriales Hércules ARM PDFDocumento6 páginasCurso en Línea Programación de Microcontroladores Industriales Hércules ARM PDFMartha Jesus ZAún no hay calificaciones
- AI - TermocuplasDocumento66 páginasAI - TermocuplasVladimir Aliro Quezada CidAún no hay calificaciones
- Electroneumatica1 1Documento30 páginasElectroneumatica1 1Alfonso Olguin RuizAún no hay calificaciones
- Filtro KalmanDocumento3 páginasFiltro KalmanAndres Perez GarciaAún no hay calificaciones
- Estructura Del Helicoptero PDFDocumento53 páginasEstructura Del Helicoptero PDFCmwUnapAún no hay calificaciones
- PROYECTO OLEOHIDRAULICA ListoDocumento25 páginasPROYECTO OLEOHIDRAULICA ListoDavid RuizAún no hay calificaciones
- Evaluativo - Sistema de Control Iii CorteDocumento2 páginasEvaluativo - Sistema de Control Iii CorteCESAR MIERAún no hay calificaciones
- Practica 2 Sistemas de AeronavesDocumento12 páginasPractica 2 Sistemas de AeronavesJonatan Amezola GarciaAún no hay calificaciones
- Construccion de Palas para Aerogeneradores en Madera de LengqDocumento14 páginasConstruccion de Palas para Aerogeneradores en Madera de LengqLuis Maria SaavedraAún no hay calificaciones
- LDocumento4 páginasLJuan Sebastian Becerra VillamilAún no hay calificaciones
- Determinación Experimental Coeficiente Conveccion Sobre Un CilindroDocumento6 páginasDeterminación Experimental Coeficiente Conveccion Sobre Un CilindroJuan Sebastian Becerra VillamilAún no hay calificaciones
- Problemas Evaluación ConvecciónDocumento7 páginasProblemas Evaluación ConvecciónJuan Sebastian Becerra VillamilAún no hay calificaciones
- Amfe Radio HFDocumento5 páginasAmfe Radio HFJuan Sebastian Becerra VillamilAún no hay calificaciones
- Shipment Labels 181119130035Documento2 páginasShipment Labels 181119130035Juan Sebastian Becerra VillamilAún no hay calificaciones
- Problemas Propuestos Conduccic3b3n EstacionariaDocumento4 páginasProblemas Propuestos Conduccic3b3n EstacionariaJuan Sebastian Becerra VillamilAún no hay calificaciones
- RiascosViverosJheferson PDFDocumento281 páginasRiascosViverosJheferson PDFJuan Sebastian Becerra Villamil100% (1)
- Clase 3 P-Ii (PC-1) PDFDocumento13 páginasClase 3 P-Ii (PC-1) PDFJuan Sebastian Becerra VillamilAún no hay calificaciones
- Manual de Practicas Bromatologia 2014Documento145 páginasManual de Practicas Bromatologia 2014Timi San100% (1)
- Grado 7. Guia 3. EstadisiticaDocumento9 páginasGrado 7. Guia 3. Estadisiticaluiscuestaperea100% (2)
- Memo Técnico IVADocumento63 páginasMemo Técnico IVACRISTIAN ALEJANDRO ARMAS LASTRAAún no hay calificaciones
- Nivel 5 kg2018Documento4 páginasNivel 5 kg2018vidalAún no hay calificaciones
- Tra Cemento YuraDocumento43 páginasTra Cemento YuraClever Paredes Larico67% (3)
- Código Postal - Cartagena y Bolívar Entran en La Moda - Código Postal Cartagena Bolívar Codificacion Postal - El Universal - CartagenaDocumento3 páginasCódigo Postal - Cartagena y Bolívar Entran en La Moda - Código Postal Cartagena Bolívar Codificacion Postal - El Universal - CartagenaJuan Carlos Orozco MoscoteAún no hay calificaciones
- RCP AvanzadoDocumento25 páginasRCP AvanzadoPercy LeonAún no hay calificaciones
- Modelo de Cuaderno de Explotacion Tcm7-309481Documento15 páginasModelo de Cuaderno de Explotacion Tcm7-309481Constanza FornerisAún no hay calificaciones
- Fundamento Teórico TornillosDocumento8 páginasFundamento Teórico TornillosAnthony Flores ObandoAún no hay calificaciones
- El Santo RosarioDocumento10 páginasEl Santo RosarioAdy AltúzarAún no hay calificaciones
- Practica 5Documento5 páginasPractica 5JONATHAN ISRAEL AGUILAR CONTRERAS33% (3)
- Refractometer UR-20Documento4 páginasRefractometer UR-20Nelson Sepulveda100% (2)
- Wuolah Free Examenjunio2020Documento11 páginasWuolah Free Examenjunio2020DUN3Aún no hay calificaciones
- Brochure Serpic PDFDocumento18 páginasBrochure Serpic PDFluisedonossaAún no hay calificaciones
- Academia Summary - Resnick Fisica Vol1 CapDocumento3 páginasAcademia Summary - Resnick Fisica Vol1 Capʙʀᴀɴᴅᴏɴ ᴀᴅᴜᴠɪʀɪAún no hay calificaciones
- Louis PasteurDocumento4 páginasLouis PasteurVIRUS DE RISAAún no hay calificaciones
- CS - Un - Esfuerzo - de - Produccion SERIE PIEDRA LIBRE PDFDocumento30 páginasCS - Un - Esfuerzo - de - Produccion SERIE PIEDRA LIBRE PDFSabrina DenizAún no hay calificaciones
- Hysys-2Documento5 páginasHysys-2Lucas WalkerAún no hay calificaciones
- Revolucionando Los Avalúos en Colombia El Impacto de La Tecnología en 2030 PDFDocumento2 páginasRevolucionando Los Avalúos en Colombia El Impacto de La Tecnología en 2030 PDFmaria PelaezAún no hay calificaciones
- 7° Guia Reciclaje.Documento2 páginas7° Guia Reciclaje.MatiasAún no hay calificaciones
- 2023 - 24. QG1 - Reglas de Solubilidad y ElectrolitosDocumento14 páginas2023 - 24. QG1 - Reglas de Solubilidad y ElectrolitosCinthya ContrerasAún no hay calificaciones
- Mundodisco 31 Terry Pratchet - Monstruoso RegimientoDocumento376 páginasMundodisco 31 Terry Pratchet - Monstruoso RegimientoPuroshuesos Nada NadieAún no hay calificaciones
- Comprensión Lectora5vDocumento4 páginasComprensión Lectora5vAngeli GLAún no hay calificaciones
- Tarea 1 - Robin Hernan PantojaDocumento24 páginasTarea 1 - Robin Hernan PantojaJhon CaroAún no hay calificaciones
- Proyecto A Base de MoringaDocumento14 páginasProyecto A Base de MoringaDavid Mendoza CarreraAún no hay calificaciones
- Que Estudia La BioingenieríaDocumento5 páginasQue Estudia La BioingenieríaAlicia Calderon ParedesAún no hay calificaciones
- Prefectura Naval Argentina: Ordenanza #4/02 (DPSN)Documento35 páginasPrefectura Naval Argentina: Ordenanza #4/02 (DPSN)fernando hutnikAún no hay calificaciones
- Unidad 4. Actividad 3. Mercado de Negocio y Mercado de ConsumoDocumento2 páginasUnidad 4. Actividad 3. Mercado de Negocio y Mercado de ConsumoGeysha ZapataAún no hay calificaciones
- EcologiaDocumento111 páginasEcologiaIrene Mota CastrejonAún no hay calificaciones
- BIOGRAFÍA DE JOSÉ MUJICA-y OtrosDocumento7 páginasBIOGRAFÍA DE JOSÉ MUJICA-y OtrosMargarita Beltran ArceAún no hay calificaciones