También podría gustarte
- Introducing The GEK Gasifier Systems - Rev3Documento41 páginasIntroducing The GEK Gasifier Systems - Rev3picottoAún no hay calificaciones
- Iso-14224-2016 - EspañolDocumento289 páginasIso-14224-2016 - EspañolJonathan Garvizo94% (66)
- Taller SD P7aDocumento1 páginaTaller SD P7apicottoAún no hay calificaciones
- Contenido SDDocumento2 páginasContenido SDpicottoAún no hay calificaciones
- Los 10 Errores Más Graves en OBDII Por Beto Booster PDFDocumento64 páginasLos 10 Errores Más Graves en OBDII Por Beto Booster PDFamorenmarcha100% (5)
- HTTP WWW - Mantenimientomundial.com Sites Mmnew Cap Cursos Amend ProjectDocumento7 páginasHTTP WWW - Mantenimientomundial.com Sites Mmnew Cap Cursos Amend ProjectpicottoAún no hay calificaciones
- Olympian International Diesel Genset Operator Manual - Spanish 356-7234Documento65 páginasOlympian International Diesel Genset Operator Manual - Spanish 356-7234tommy lanyon100% (3)
- Introducing The GEK Gasifier Systems - Rev3Documento41 páginasIntroducing The GEK Gasifier Systems - Rev3picottoAún no hay calificaciones
- Introducing The GEK Gasifier Systems - Rev3.en - EspañolDocumento18 páginasIntroducing The GEK Gasifier Systems - Rev3.en - EspañolpicottoAún no hay calificaciones
- Malla Especialización en Gestión Integral de La Automatización IndustrialDocumento1 páginaMalla Especialización en Gestión Integral de La Automatización IndustrialpicottoAún no hay calificaciones
- Introduccion A SDDocumento22 páginasIntroduccion A SDpicottoAún no hay calificaciones
- Taller DerivadasDocumento1 páginaTaller DerivadaspicottoAún no hay calificaciones
- Terminologia MTDocumento6 páginasTerminologia MTpicottoAún no hay calificaciones
- 7-Sistemas de EncendidoDocumento14 páginas7-Sistemas de EncendidopicottoAún no hay calificaciones
- Apéndice D - Vibración TorcionalDocumento3 páginasApéndice D - Vibración TorcionalRom DioAún no hay calificaciones
- E 1316 Terminología Estándar paraDocumento42 páginasE 1316 Terminología Estándar parapicotto100% (2)
- Panorama de Riesgos Y Prevenciones de Seguridad IndustrialDocumento21 páginasPanorama de Riesgos Y Prevenciones de Seguridad IndustrialpicottoAún no hay calificaciones
- Los Sistemas de Gestión de CalidadDocumento63 páginasLos Sistemas de Gestión de CalidadRicardo Izquierdo FloresAún no hay calificaciones
- Como Soldar Con TIGDocumento17 páginasComo Soldar Con TIGangelAún no hay calificaciones
- Informativo GASOLINADocumento2 páginasInformativo GASOLINAespartaco2099Aún no hay calificaciones
- 08 Proceso GTAWDocumento15 páginas08 Proceso GTAWjesus_sandovalAún no hay calificaciones
- Presentacion - Res. 3673 Reglamento Trabajo Seg. en AlturaDocumento47 páginasPresentacion - Res. 3673 Reglamento Trabajo Seg. en AlturapicottoAún no hay calificaciones
- Esquema de Grupo ElectrógenoDocumento1 páginaEsquema de Grupo Electrógenopicotto100% (2)
- Los 10 Mandamientos de La Seguridad MineraDocumento1 páginaLos 10 Mandamientos de La Seguridad MinerapicottoAún no hay calificaciones
- DISEÑO DE UNA WPS Titan Soladaura DuraDocumento3 páginasDISEÑO DE UNA WPS Titan Soladaura DurapicottoAún no hay calificaciones
- CarátulaDocumento1 páginaCarátulaRom DioAún no hay calificaciones
- Que Hacer y No Hacer en Caso de Accidente Automobilistico (Conductores)Documento3 páginasQue Hacer y No Hacer en Caso de Accidente Automobilistico (Conductores)picottoAún no hay calificaciones
- Qué Es SoldaduraDocumento13 páginasQué Es SoldadurapicottoAún no hay calificaciones
- Memorias Capt 1 PDFDocumento7 páginasMemorias Capt 1 PDFDiego Rodriguez CasallasAún no hay calificaciones
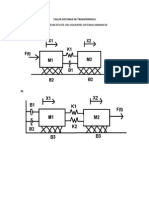
- Sistemas transferencia modelo matemáticoDocumento3 páginasSistemas transferencia modelo matemáticopicottoAún no hay calificaciones
- Solución Guia N°5. ESTEQUIOMETRIA DE LA REACCION IDocumento5 páginasSolución Guia N°5. ESTEQUIOMETRIA DE LA REACCION IPablo Santillán LopezAún no hay calificaciones
- Negociación y Contratación InternacionalDocumento3 páginasNegociación y Contratación Internacionalyara espinozaAún no hay calificaciones
- Buenos Dias Mina Justa 2022.07.08Documento5 páginasBuenos Dias Mina Justa 2022.07.08Eloy Ayna AduviriAún no hay calificaciones
- Poemas CortosDocumento24 páginasPoemas CortosArmand MartinezAún no hay calificaciones
- Ensayo La Planeación Estratégica Como Respuesta Ante La Crisis EconómicaDocumento4 páginasEnsayo La Planeación Estratégica Como Respuesta Ante La Crisis EconómicaDiego PovedaAún no hay calificaciones
- Semana de La Alimentación Saludable para NiñosDocumento24 páginasSemana de La Alimentación Saludable para NiñosMalena LauraAún no hay calificaciones
- Modelo Urien BronfenbrennerDocumento5 páginasModelo Urien BronfenbrennerVíctor RománAún no hay calificaciones
- Declaracion de Cambio Por Exportaciones de Bienes Formulario N 2 SENADocumento1 páginaDeclaracion de Cambio Por Exportaciones de Bienes Formulario N 2 SENAanderson castañoAún no hay calificaciones
- Historia ClínicaDocumento10 páginasHistoria ClínicaEfraín J. Otero Palacios0% (1)
- Mapeo de Procesos-CalidadDocumento19 páginasMapeo de Procesos-CalidadErick EdsonAún no hay calificaciones
- Plano OclusalDocumento7 páginasPlano OclusalMajo MasacheAún no hay calificaciones
- Aplicaciones A La Vida CotidianaDocumento4 páginasAplicaciones A La Vida Cotidianajltorcas100% (1)
- Planta en Esparrago Verdes'Documento23 páginasPlanta en Esparrago Verdes'IA KATTYA MILAGROS MOZCOL VILCHEZAún no hay calificaciones
- Tarea Pedagogia Semana 4Documento2 páginasTarea Pedagogia Semana 4claudia rosalesAún no hay calificaciones
- Autoridades responsables del proceso de contrataciónDocumento8 páginasAutoridades responsables del proceso de contrataciónVicvicXGonzxAún no hay calificaciones
- Módulo 6. Programa de Inspecciones y Monitoreo de Los Factores de RiesgoDocumento8 páginasMódulo 6. Programa de Inspecciones y Monitoreo de Los Factores de RiesgoSTJAún no hay calificaciones
- PETS Preparación de Tapón en Labores ParalizadasDocumento2 páginasPETS Preparación de Tapón en Labores ParalizadasDario Bravo BordaAún no hay calificaciones
- Ficha Técnica KIKKO 2021Documento2 páginasFicha Técnica KIKKO 2021jlogisticaAún no hay calificaciones
- Procesos de RenovacionDocumento26 páginasProcesos de RenovacionFelipe Gonzalez GavilanAún no hay calificaciones
- Tarea Académica 1 - Ensayo Sobre La Aplicación de Las TIC en El Proceso de E-ADocumento8 páginasTarea Académica 1 - Ensayo Sobre La Aplicación de Las TIC en El Proceso de E-AMisheyraLucayAún no hay calificaciones
- Arterias PulsosDocumento4 páginasArterias PulsosEstrella AnchilloAún no hay calificaciones
- Stanford InnovacionesDocumento30 páginasStanford InnovacionesRené Pedroza0% (1)
- Foro ArteDocumento8 páginasForo ArteGiovanny HernándezAún no hay calificaciones
- Rotulación de SeguridadDocumento5 páginasRotulación de SeguridadRubén Guerra LozanoAún no hay calificaciones
- Redacción AvanzadaDocumento5 páginasRedacción AvanzadaalazraqAún no hay calificaciones
- Ficha Tecnica Altair 5X MSADocumento3 páginasFicha Tecnica Altair 5X MSARelzatec Innovaciones En Seguridad Industrial0% (1)
- Instructivo Orden MedicaDocumento2 páginasInstructivo Orden MedicaArianaAún no hay calificaciones
- Guia de Razonamiento Matematico para ElDocumento9 páginasGuia de Razonamiento Matematico para ElMiriam BernotAún no hay calificaciones
- Historia de La AstronomiaDocumento6 páginasHistoria de La AstronomiaNeidy Rios AguileraAún no hay calificaciones
- 5 - Charm - Tracy Wolff (Google Trasnlate)Documento1010 páginas5 - Charm - Tracy Wolff (Google Trasnlate)L O L A43% (7)