También podría gustarte
- Robotica M5T4Documento15 páginasRobotica M5T4Rebeca Martínez AbarcaAún no hay calificaciones
- Introducion A La RoboticaDocumento8 páginasIntroducion A La RoboticaRebeca Martínez AbarcaAún no hay calificaciones
- Lego EhuDocumento18 páginasLego EhuJosé María García MartínezAún no hay calificaciones
- Capitulo 1 Microcontroladores Pic16f81Documento2 páginasCapitulo 1 Microcontroladores Pic16f81Ricardo Castro LinaresAún no hay calificaciones
- Las Mejores Herramientas de Desarrollo PDocumento15 páginasLas Mejores Herramientas de Desarrollo Pecua toursAún no hay calificaciones
- Flowcode Curso de ProgramacionDocumento87 páginasFlowcode Curso de ProgramacionELPICHUE67% (3)
- Sistemas EmbebidosDocumento11 páginasSistemas EmbebidosJesus Antonio Duran AcevedoAún no hay calificaciones
- Comunicacion Entre El PLC y La Raspberry Pi 2 PDFDocumento10 páginasComunicacion Entre El PLC y La Raspberry Pi 2 PDFAlfredo Israel Rodríguez SotoAún no hay calificaciones
- Tarea 2 - BAUTISTA CASTAÑEDA MANUEL AARONDocumento9 páginasTarea 2 - BAUTISTA CASTAÑEDA MANUEL AARONMANUEL AARON BAUTISTA CASTAÑEDAAún no hay calificaciones
- Equipo 5 - Ev2 - IarDocumento15 páginasEquipo 5 - Ev2 - Iarjared esau gutierrez riveraAún no hay calificaciones
- Menus Con FlowcodeDocumento10 páginasMenus Con FlowcodeefrarbAún no hay calificaciones
- Visual Basic - ALUDocumento17 páginasVisual Basic - ALUChristian Galarza CruzAún no hay calificaciones
- Software de Implementación EmbebidosDocumento3 páginasSoftware de Implementación EmbebidosSantiago QuispeAún no hay calificaciones
- Controladores Industriales 2Documento28 páginasControladores Industriales 2sebastian riquelmeAún no hay calificaciones
- Introduccion A Microcontroladores Pic Con CDocumento19 páginasIntroduccion A Microcontroladores Pic Con CMiguel Adrian CamachoAún no hay calificaciones
- Implementación de Hmi para Un PLC Micrologix 1100 Con Raspberry Pi 2 Modelo BDocumento10 páginasImplementación de Hmi para Un PLC Micrologix 1100 Con Raspberry Pi 2 Modelo BGranjaguar tuxAún no hay calificaciones
- Kotlin y Jetpack Compose. Desarrollo de aplicaciones AndroidDe EverandKotlin y Jetpack Compose. Desarrollo de aplicaciones AndroidAún no hay calificaciones
- 5.modelos Utilizados en Robótica EducativaDocumento33 páginas5.modelos Utilizados en Robótica EducativaEduardo Donoso AceitunoAún no hay calificaciones
- Microprocesadores y Microcontroladores Con Sistema Operativo AndroidDocumento13 páginasMicroprocesadores y Microcontroladores Con Sistema Operativo AndroidFerdy Casaverde LopezAún no hay calificaciones
- Practica 5 Entradas Salida Del MicrocontroladorDocumento24 páginasPractica 5 Entradas Salida Del MicrocontroladorALVARO RMZ.FLORESAún no hay calificaciones
- Elektor n399 Septiembre 2013Documento88 páginasElektor n399 Septiembre 2013Maria100% (1)
- A9R17 TMPDocumento22 páginasA9R17 TMPLuze ArizpeAún no hay calificaciones
- LoshDocumento2 páginasLoshTom CruzAún no hay calificaciones
- Investigacion Robots SerialesDocumento10 páginasInvestigacion Robots SerialesVICTOR LUIS MORON CENTENOAún no hay calificaciones
- Uso Didactico Del ProteusDocumento6 páginasUso Didactico Del Proteusruben posadasAún no hay calificaciones
- CIAA Software v1.0 PDFDocumento8 páginasCIAA Software v1.0 PDFTamago83Aún no hay calificaciones
- Capitulo 8 - HalocodeDocumento6 páginasCapitulo 8 - HalocodeMariana Salazar GarciaAún no hay calificaciones
- VHDL FpgaDocumento14 páginasVHDL FpgaJuan Carlos Miranda GarnicaAún no hay calificaciones
- Tutorial - Hi - Tech. Mplab Programacion MicrocontroladoresDocumento12 páginasTutorial - Hi - Tech. Mplab Programacion MicrocontroladoreswascAún no hay calificaciones
- 2 - Antecedentes y Estado Del ArteDocumento8 páginas2 - Antecedentes y Estado Del Artejulio cesarAún no hay calificaciones
- Simuladores de Robots - Jhannifer FDocumento10 páginasSimuladores de Robots - Jhannifer FJhannifer100% (1)
- Reporte Proyecto FinalDocumento25 páginasReporte Proyecto Finalluis angelAún no hay calificaciones
- Informe Practica Laboratorio 2Documento5 páginasInforme Practica Laboratorio 2Daniel F. RodasAún no hay calificaciones
- Los Lenguajes de Programacion y Manejo de Puertos DijitalesDocumento7 páginasLos Lenguajes de Programacion y Manejo de Puertos DijitalesJEANS CARLOS ALCARRAZ PILATASIGAún no hay calificaciones
- Proyecto Final-Giroscopio Desde Android para Visualizar en FPGA.Documento4 páginasProyecto Final-Giroscopio Desde Android para Visualizar en FPGA.Pablo Andres SáenzAún no hay calificaciones
- Electro NikaDocumento12 páginasElectro NikaAntony Stip Flores TorresAún no hay calificaciones
- Actividad 3 Interfases Gráficas 1Documento8 páginasActividad 3 Interfases Gráficas 1Pedro LozanoAún no hay calificaciones
- Modelos de Programación de MicrocontroladoresDocumento4 páginasModelos de Programación de MicrocontroladoresKarmen Olguin100% (3)
- Ideas para Participar en Programación y Construcción de Modelos Roboticos - JfenDocumento8 páginasIdeas para Participar en Programación y Construcción de Modelos Roboticos - JfenMarco A. ChalcoAún no hay calificaciones
- Informe ProgramacionDocumento29 páginasInforme Programacionortizconde100% (1)
- Modelos de Programacion de MicrocontroladoresDocumento4 páginasModelos de Programacion de MicrocontroladoresMigue Flores100% (2)
- Marco TeóricoDocumento2 páginasMarco TeóricoBruno AlcocerAún no hay calificaciones
- MicrocontroladoresDocumento4 páginasMicrocontroladoresAnonymous ot4mxDz4UnAún no hay calificaciones
- A#1JRDGDocumento4 páginasA#1JRDGricardoAún no hay calificaciones
- LAB Taller 01 CV S0FT 2021-2Documento22 páginasLAB Taller 01 CV S0FT 2021-2Frank Sebastian Pizarro SanchezAún no hay calificaciones
- Proyecto Brazo Robotico Con ElectroimanDocumento8 páginasProyecto Brazo Robotico Con Electroimanjohn caceresAún no hay calificaciones
- Cursorobotc 2007Documento40 páginasCursorobotc 2007Nestor Octavio Hernandez VelasquezAún no hay calificaciones
- TAREA Fase 4Documento17 páginasTAREA Fase 4Jhon SuarezAún no hay calificaciones
- Informe Proyecto Robot MovilDocumento5 páginasInforme Proyecto Robot MovilRonaldoAún no hay calificaciones
- Primeros Pasos Pic 2018Documento192 páginasPrimeros Pasos Pic 2018daniel gonzalez martinezAún no hay calificaciones
- Investigacion Fundamentos de La Robotica 4.2Documento17 páginasInvestigacion Fundamentos de La Robotica 4.2Benjamin de jesus Solis doloresAún no hay calificaciones
- Lenguaje Ensamblador Semana 1 - PDocumento5 páginasLenguaje Ensamblador Semana 1 - PDiego Curipoma0% (1)
- ICI701 Apunte Semana3 2023Documento30 páginasICI701 Apunte Semana3 2023Ramos ConstrucciónAún no hay calificaciones
- Tutorial Hi Tech 2Documento12 páginasTutorial Hi Tech 2José HeinAún no hay calificaciones
- PIC Vs ATMDocumento3 páginasPIC Vs ATMNeftalí Darío Villar HernándezAún no hay calificaciones
- Logo Arranque DirectoDocumento7 páginasLogo Arranque Directomija100% (1)
- Tema 3 MicrocontroladoresDocumento7 páginasTema 3 MicrocontroladoresMiguelon BarValAún no hay calificaciones
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDe EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeAún no hay calificaciones
- Programación gráfica para ingenierosDe EverandProgramación gráfica para ingenierosCalificación: 4.5 de 5 estrellas4.5/5 (3)
- Processing: Desarrollo de interfaces de usuario, aplicaciones de visión artificial e IoT para Arduino y ESP8266De EverandProcessing: Desarrollo de interfaces de usuario, aplicaciones de visión artificial e IoT para Arduino y ESP8266Calificación: 5 de 5 estrellas5/5 (1)
- CHAVETADocumento2 páginasCHAVETAJaime Alan Burgos FernandezAún no hay calificaciones
- Catalogo de ConceptosDocumento28 páginasCatalogo de ConceptosGabi MedelAún no hay calificaciones
- Informe Tecnico Quala 2014Documento7 páginasInforme Tecnico Quala 2014chogue1488Aún no hay calificaciones
- Ejercicios PParcialDocumento17 páginasEjercicios PParcialKevin RodriguezAún no hay calificaciones
- Check List para ResiduosDocumento7 páginasCheck List para ResiduosMayra CruzAún no hay calificaciones
- Check List de OxicorteDocumento1 páginaCheck List de OxicorteFanyAún no hay calificaciones
- Instructivo Nuevos Ingresantes.Documento7 páginasInstructivo Nuevos Ingresantes.Carlos AlvarezAún no hay calificaciones
- Fundamentos - Primeros Programas - Que Siga El Movimiento - Sé ProgramarDocumento3 páginasFundamentos - Primeros Programas - Que Siga El Movimiento - Sé ProgramarMaria Jose Egea MussiAún no hay calificaciones
- Consumo, El Imperio de Los SentidosDocumento2 páginasConsumo, El Imperio de Los SentidosDiego UzcangaAún no hay calificaciones
- Cotizaciòn - MANTENIMIENTO CORRECTIVO-PREVENTIVO AA 17032023 IGVDocumento2 páginasCotizaciòn - MANTENIMIENTO CORRECTIVO-PREVENTIVO AA 17032023 IGVnoc bantelAún no hay calificaciones
- Sistemas TecnologicosDocumento3 páginasSistemas TecnologicosHaanyyHanYyTRAún no hay calificaciones
- ANEXO 1. Procedimiento Movilizacion y DesmovilizacionDocumento8 páginasANEXO 1. Procedimiento Movilizacion y Desmovilizacionleonardo ochoa0% (1)
- Carta Tecnica - ADMW410Documento44 páginasCarta Tecnica - ADMW410Romeo CantoralAún no hay calificaciones
- Linea de TiempoDocumento4 páginasLinea de TiempoRodrigo Corea50% (6)
- Tomas de Muestreo de AceiteDocumento6 páginasTomas de Muestreo de AceiteEDSON JONATHAN SALINAS AYALAAún no hay calificaciones
- JumDocumento4 páginasJumEderArleyAún no hay calificaciones
- TFG PlantillaDocumento11 páginasTFG PlantillaMarta Palencia FernandezAún no hay calificaciones
- PRACTICA 1 - Costos y Presupuestos - II Sábado 30Documento4 páginasPRACTICA 1 - Costos y Presupuestos - II Sábado 30Lesli Melani Lima ChoccelahuaAún no hay calificaciones
- Solicitud Residencia ProfesionalDocumento1 páginaSolicitud Residencia ProfesionalGiselle CervantesAún no hay calificaciones
- Qc-Entregable IiDocumento3 páginasQc-Entregable IiJunior PardoAún no hay calificaciones
- Estudio de Suelos Institucion Educativa El Hatillo - Municipio de BarbosaDocumento14 páginasEstudio de Suelos Institucion Educativa El Hatillo - Municipio de Barbosageology1100% (1)
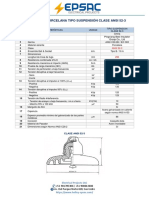
- Aislador de Porcelana Tipo Suspension Clase Ansi 52 3Documento1 páginaAislador de Porcelana Tipo Suspension Clase Ansi 52 3jose giancarlo oquendo amezquita100% (1)
- Informe Tecnico de Ejecucion de Mantenimiento QuellomoccoDocumento79 páginasInforme Tecnico de Ejecucion de Mantenimiento QuellomoccoodilonAún no hay calificaciones
- Modelo IdcDocumento21 páginasModelo IdcDaNi AlexisAún no hay calificaciones
- PI135 Lab5 2019-1Documento11 páginasPI135 Lab5 2019-1Raví García AreuAún no hay calificaciones
- Autoestima IntroduccionDocumento2 páginasAutoestima IntroduccionSeReNyMoOn78% (9)
- gcp207-76-145 EspañolDocumento70 páginasgcp207-76-145 EspañolRodolfo CarruyoAún no hay calificaciones
- FPT Oc0576 Fiorella M PDFDocumento1 páginaFPT Oc0576 Fiorella M PDFDavid Manuel Chagua RojasAún no hay calificaciones
- TRAB Rec01 Plantilla Esp - v0r0Documento7 páginasTRAB Rec01 Plantilla Esp - v0r0Gustavo Padilla Zequeira100% (1)
- M HDN 2024 Q1-SP-webDocumento23 páginasM HDN 2024 Q1-SP-webandre sarmientoAún no hay calificaciones