0% encontró este documento útil (0 votos)
41 vistas8 páginasFunciones
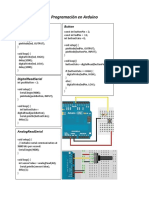
Este documento describe cómo construir un sensor de distancia ultrasónico utilizando Arduino. Explica los componentes necesarios, cómo conectarlos y el código para medir distancias y activar alertas visuales y sonoras.
Cargado por
Sergio Jimenez jimenezDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
41 vistas8 páginasFunciones
Este documento describe cómo construir un sensor de distancia ultrasónico utilizando Arduino. Explica los componentes necesarios, cómo conectarlos y el código para medir distancias y activar alertas visuales y sonoras.
Cargado por
Sergio Jimenez jimenezDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
/ 8